太阳电池阵铰链机构刚度等效方法
2010-06-08吴远波杜江华
吴远波,杜江华
(1.上海交通大学 机械与动力工程学院,上海 200030;2.上海卫星工程研究所,上海 200240)
0 前言
卫星太阳电池阵一般由若干贴有太阳电池片的基板组成,各基板之间以及太阳电池阵和星体之间通过铰链连接,铰链上装有盘簧,用于产生驱动力矩。在地面运输及发射过程中,太阳电池阵收拢并压紧在卫星表面。正常工作时,太阳电池阵通过盘簧产生的力矩自动展开到位并锁定[1]。
太阳电池阵收拢和展开状态的模态参数(固有频率、振型等)是太阳电池阵结构设计重要的技术要求之一。为此,设计过程中需要对其进行动力学建模和仿真分析,获取模态参数。运用有限元法,可以较准确地对基板、连接架等结构元件建模,但如何准确地模拟复杂的铰链一直是太阳电池阵模态分析面临的最大难题。事实表明,铰链刚度对于太阳电池阵展开状态的模态参数具有决定性影响。本文研究了铰链等效的几种典型方法,并将直接刚度测量中所采取的分析方法与试验相结合,确定一个等效的铰链机构的刚度,通过某型号太阳电池阵展开状态模态的计算对其进行比较验证。
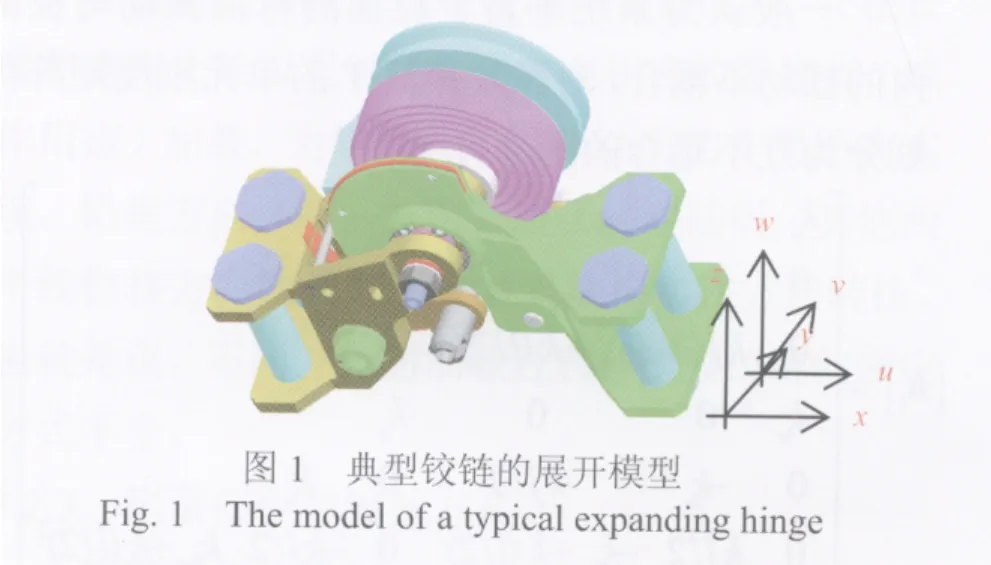
1 铰链结构
典型铰链机构模型如图1所示。铰链机构是由众多零部件组成的可活动部件,因而必定存在对铰链刚度产生影响的间隙、滑移和弹性接触等诸多因素。铰链机构集活动机构副功能与连接结构功能于一体,造成了太阳电池阵的展开处于非线性状态。对此,既需要从理论上进行分析,也需要一种工程上适用的简单可行的处理方法。
2 铰链机构的等效方法
2.1 等效梁方法
将铰链简单地等效为梁单元是早期太阳电池阵模态分析时常用的方法之一,梁单元的材料一般与公铰和母铰的结构材料相同。通常有两种方法确定梁单元的刚度:
1)根据实际太阳电池阵模态试验所得到的大量工程经验,确定梁单元的截面形状;
2)根据刚度等效的方法来直接计算梁单元截面的面积、惯性矩等特性参数。
2.2 等效弹簧及刚度识别
将单个铰链简化为两端结点各有 6个自由度的弹簧单元T,通过两个铰链副连接的子结构(两块板)R和S(图2),弹簧单元的等效弹簧T的刚度系数为ku、kv、kw、kθu、kθv、kθw,等效弹簧长度为l。

图2 组合结构Fig.2 Combination structure of a hinge
一般认为系统垂直于板面的弯曲振动与板面内的摆动不耦合,则等效弹簧T的单元刚度矩阵可划分为互不耦合的两部分[3]:
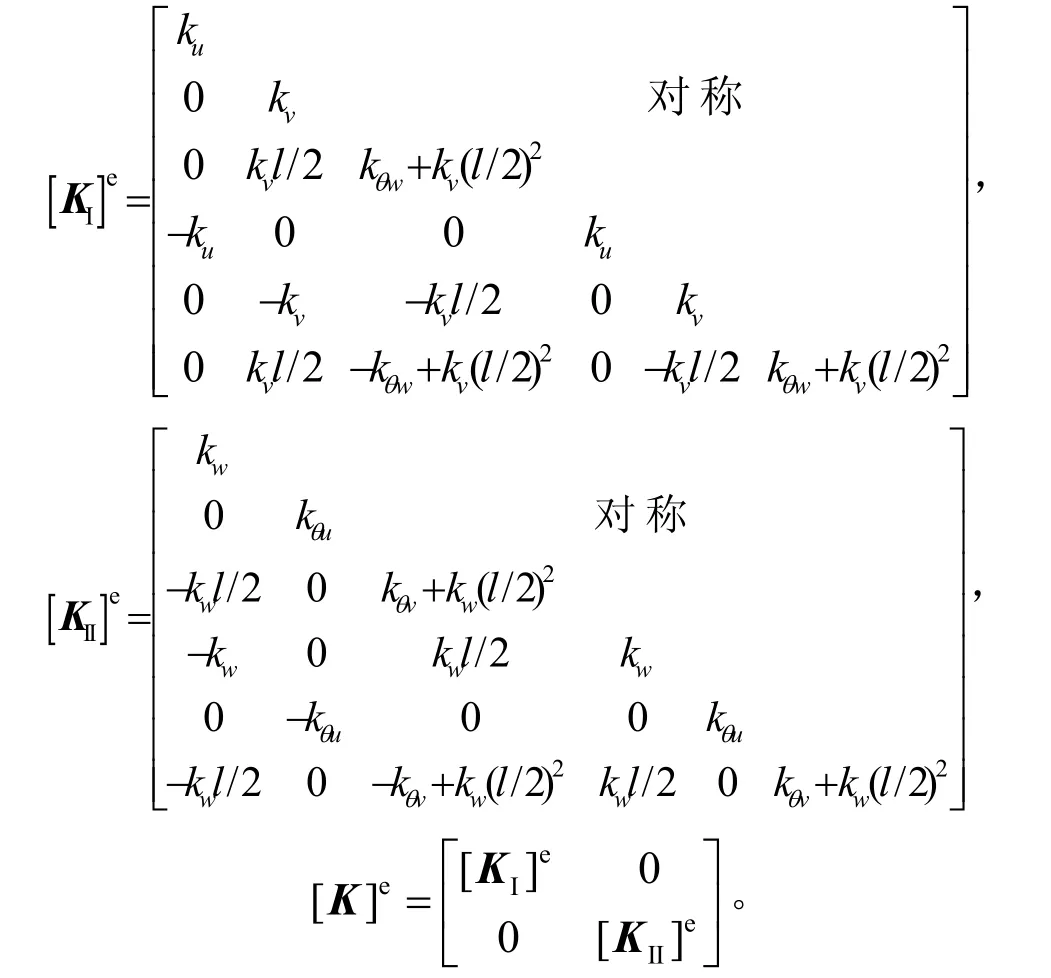
上述系统作自由振动时,对于连接子结构的等效弹簧T,其运动方程可表示为

式中:上标t表示等效弹簧T;u即为子结构R和S的边界节点在u方向上的位移矢量;Q即子结构R和S的边界节点力矢量。忽略弹簧的惯性效应(低频振动时ω很小),有:

若可以求得振动试验时的u(即子结构R和S的边界节点的位移矢量)和Q(即子结构 R和 S的边界节点力矢量),则由式(2)可求得等效弹簧 T的刚度系数[4]:
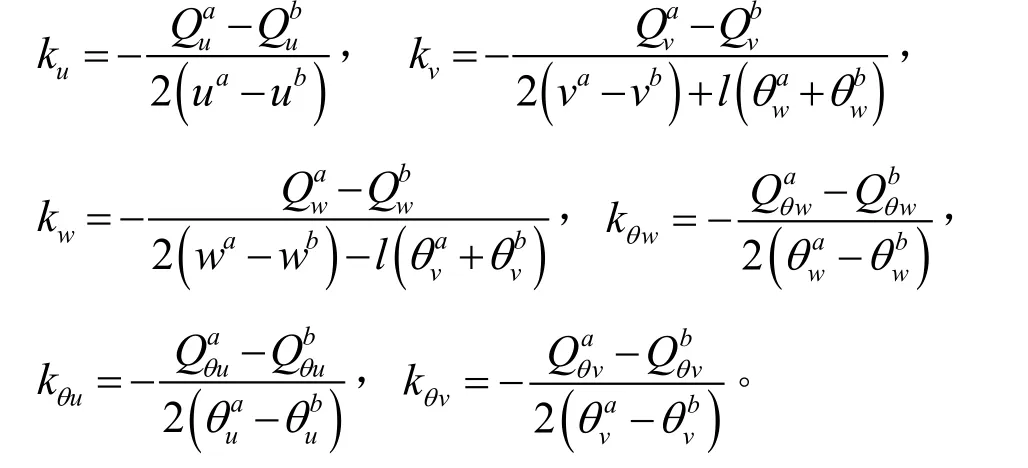
有多种不同的方法可以求得ut和Qt。对子结构 R和 S,可以同样列出如式(1)的子结构运动方程,将其子结构自由度按子结构内部节点的可测量线位移与不可测量角位移及待识别的界面节点位移分块处理,并令子结构内部节点力矢量为0,可由子结构运动方程及可测量自由度位移求出界面节点力矢量及界面节点位移[3]。通过试验模态的频率修正分析模型,根据分析模型所得的模态或者试验的拟合模态(还可以进一步进行模态修正)即可测量自由度位移,由模态叠加法可以求得不可测自由度位移[4]。
2.3 直接刚度测量
将铰链等效为质量-阻尼-弹簧系统,系统的质量矩阵为M,阻尼矩阵为C,刚度矩阵为K,则系统的动力学方程为MX′ +CX′ +KX=F。对其进行拉氏变换,则有 (s2M+sC+K)X(s) =F(s)。将s换成jω即得傅氏域中的变换:

由此得到系统的动刚度κ= -ω2M+jωC+K,可见,动刚度是一个包含静刚度、阻尼和质量的一个综合量,它既是一个频率依赖的变量,又是一个复数量。
对于铰链这样有复杂机构的系统来说,系统的动刚度检测和识别具有较大的技术难度,工程应用中还需要进一步简化。太阳电池阵在展开状态下,所有铰链都处于锁定状态,太阳电池阵的频率主要由铰链的锁定刚度决定。由于卫星太阳电池阵尺寸较大,频率相对较低,尤其是卫星控制系统最关心的一阶弯曲频率一般都小于1 Hz,所以在工程应用中一般忽略铰链动刚度中与频率的相关项,仅保留静刚度K,并通过某些方法得到相应的静刚度即可。所谓静刚度是弹性体所受外力的增量与其所产生的位移的增量之比,就是产生单位位移所需的力。
3 算例分析
上述3种铰链的等效方法各有利弊。等效梁方法是早期太阳电池阵模态分析时常用的方法之一,简单但误差较大,与铰链实际状况相差甚远。等效弹簧与直接刚度测量方法均与铰链实际状况接近,但等效弹簧的刚度识别比较繁杂,而对于铰链静刚度的测量,包括技术路线和测量识别方法等,就目前而言,都没有什么太大的技术难题,成为目前太阳电池阵模态分析中常用的方法。下面就以直接刚度测量方法为例,进一步阐述铰链在太阳电池阵展开状态模态分析中等效的方法与步骤。
3.1 铰链的静刚度测试与识别
工程中一般将铰链等效成具有 6个自由度的系统,具有对应的 3个线位移静刚度值(弯曲刚度)和 3个角位移静刚度值(即扭转刚度)。鉴于铰链构造对于坐标轴的非对称性,相对于6个自由度的刚度值,即对应于3个线位移和3个角位移的刚度值,严格来说,它们之间具有一定的耦合性。对铰链机构的有限元模型的预分析结果也证明了该推测。但为了控制试验的复杂程度,从铰链机构与太阳电池阵的静力作用来说,单独测量上述6个自由度的静刚度值就基本可以满足要求。
为了确定铰链的3个线位移刚度值和3个角位移刚度值,采用空称盘、砝码、台虎钳、弹簧秤、数显千分表和表架等工具测量铰链自由端的位移,并通过自由端的力和位移获得铰链机构的线位移刚度值;通过两相应测试点的线位移转换为铰链机构的力矩和转角获得角位移刚度值。
3.2 铰链静刚度的测试方法与步骤
3.2.1 固定部位与固定方式
如图3所示,铰链静刚度测试时首先通过公铰上的安装孔洞,用螺钉将铰链公铰与转接板“连成一体”,并用螺栓将转接板与基础可靠连接,使铰链根部端予以可靠的“固定”。
固定方式需要满足6个自由度加载的要求,即6个自由度均完全约束。

图3 铰链静刚度的测试Fig.3 Test for static stiffness of hinge
3.2.2 加载部位和方式
在铰链的母铰塞入连接块并紧密配合,并在长度和宽度上给以足够的余量,在相应的悬挂点(或作用点)加载,力矩载荷通过移动力的作用距离实现。铅垂方向(即v方向)加重块和砝码,其他两个线位移方向的载荷通过滑轮机构实现方向转换。也就是说,不同方向的加载过程,试验铰链的固定方式不变。
3.2.3 测量部位与测量方式
测量部位位于加载部位一端,对应加载的位移值。必要时,可以采用机械位移放大装置,同时,需要记录位移放大装置定额尺寸。
静态位移测量用数显千分表,千分表通过支架与地基可靠安装,保证不得有地基移动或支架移动。线位移的测量检测点与加力点对应同一位置。转角自由度通过两相应测试点的线位移,以转换的方式获得。需要同时记载两相应点的距离。
其中附加转接系统(如固定、加载或测量变换和放大系统)的刚度与铰链本身的刚度相比,应使它们对测试误差的影响减到最小。否则,要对测量结构进行必要的修正。
3.2.4 加载方式及加载最大值
加载采用分级加载,参考预分析数据,确定加载的最小值与最大值。最大加载不应造成铰链结构的损坏,最小加载应当使测量的位移量满足测量精度要求。采用分级加载,一般从最小加载到最大加载取3~4级,并测量相应测点的位移。
3.2.5 闭合绳索环路装置(Closed Cable Loop,
简称CCL)的实现
通过悬挂砝码控制CCL的张紧力在适当的量值。
3.2.6 试验程序
当铰链试验件与支持系统、测量传感器系统、测量仪表和加载系统等全部安装、调试完毕后,静力试验按下列步骤进行:
1)预试验。先用 20%~30%的使用载荷加载试件,进行观察,检验各系统的可靠性以及铰链承力和变形的基本趋势,如正常,则卸载至零。
2)正式试验。先取适当的加载为初始载荷,测量初始位移,然后按确定程序逐级、均匀、缓慢加载,并逐次测量记录载荷以及测量点的位移。同时,仔细观察受试铰链,直至达到预定的试验载荷。最后,检查试验件。
3.2.7 测试结果
某型号卫星的太阳电池阵由根部铰链、3对板间铰链(固定与浮动式组合使用)、3块基板及1个连接架组成,按照上述方法分别对太阳电池阵根部铰链、板间铰链机构进行了3个线位移和3个角位移方向静刚度的测试,测试结果见表1~表3。
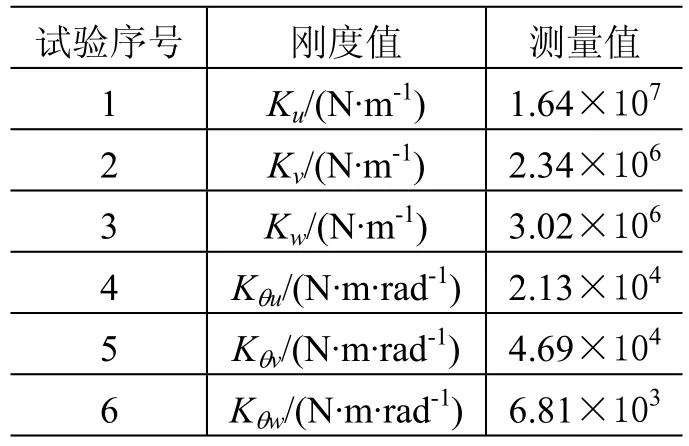
表1 根部铰链机构静刚度试验结果Table 1 Test results of static stiffness of hinge mechanism at the roots
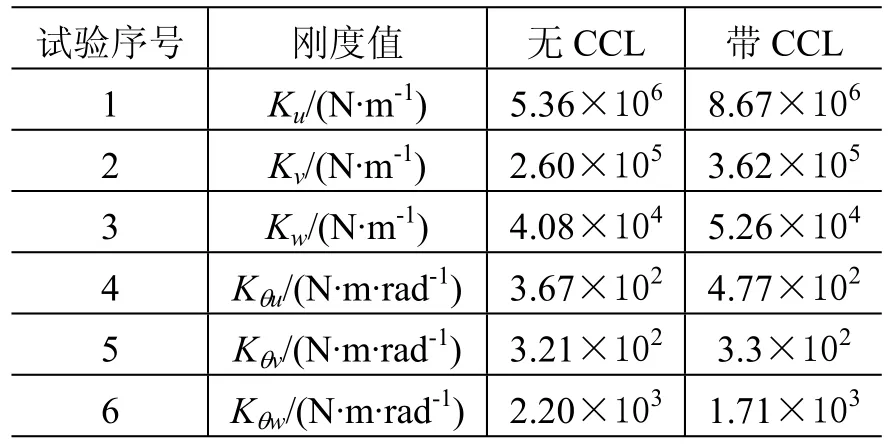
表2 固定式板间铰链机构静刚度试验结果Table 2 Test results of static stiffness of fixed hinge mechanism between the plates
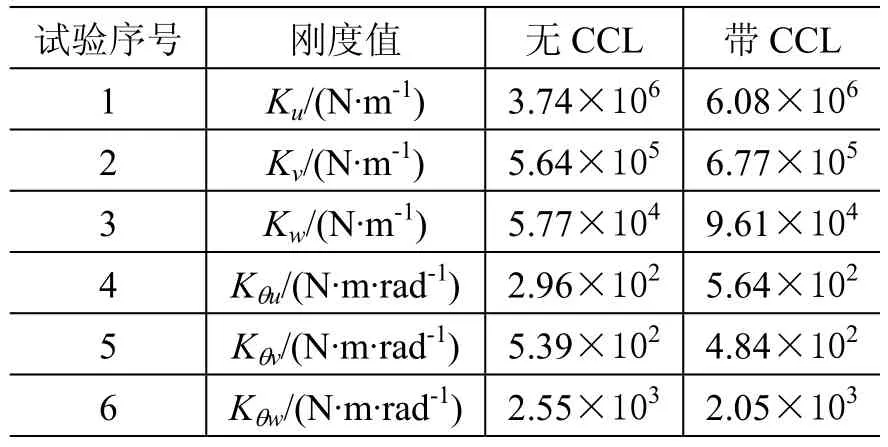
表3 浮动式板间铰链机构静刚度试验结果Table 3 Test results of static stiffness of fluctuated hinge mechanism between the plates
3.3 模态分析
用MSC.PATRAN/NASTRAN建立了太阳电池阵展开状态的有限元模型(图4),铰链采用BUSH单元进行模拟,而 BUSH单元是广义的弹簧阻尼单元,是连接2个网格点的一维单元,刚度也可根据频率的变化进行定义。单元的对角形式刚度矩阵如下[5]:
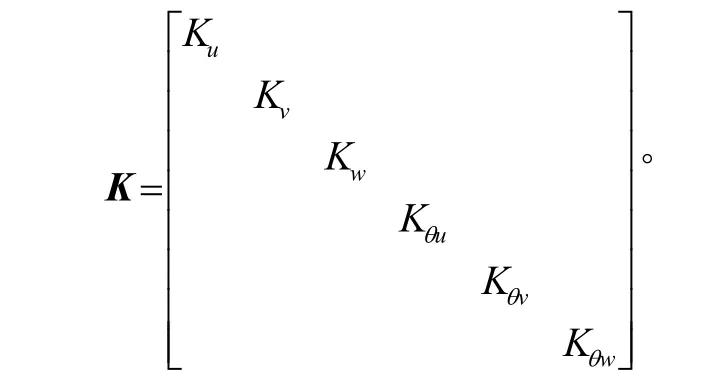

图4 展开状态的太阳电池阵有限元模型Fig.4 The finite element model for the deployment configuration of the solar cell array
将试验得到的 6个方向铰链静刚度值代入太阳电池阵有限元模型后。经计算得到太阳电池阵的一阶验算频率为0.29 Hz,验算模态如图5所示。
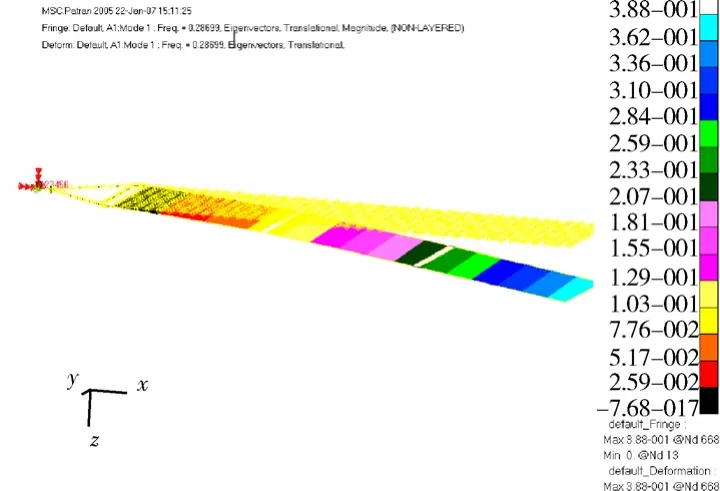
图5 太阳电池阵铰链机构试验刚度代入的验算模态Fig.5 Checking modal state of the test hinge stiffness for the solar cell array
4 结果与结论
1)有限元模态验算分析表明,采用试验刚度代入的方法计算得出的太阳电池阵频率相对于试验测试结果0.36 Hz偏低,前4阶模态形状正确,而高阶模态同样差距较大,考虑到铰链复杂的非线性特性[6],这是可以理解的。
2)导致太阳电池阵模态偏低的原因主要是刚度测试与太阳电池阵模态试验时的铰链机构状态有所差别,前者为了控制试验的复杂程度,采用单个铰链逐个测试,而在太阳电池阵模态试验时铰链机构是成对使用,使得铰链机构的系统刚度比单个的高。
3)将分析与试验结果进行比较,确定一个等效的铰链机构刚度值,来替代试验测定的铰链机构静刚度值,可以使计算精度大大提高,并可作为使用同类铰链机构的太阳电池阵展开状态的模态分析计算的输入依据。
(References)
[1]陈烈民.航天器结构与机构[M].中国科学技术出版社,2005
[2]陶建忠, 雷勇军.大型柔性太阳电池翼模态参数计算[J].湖南理工学院学报, 2003, 16(4): 33-36
[3]宋彦国, 张呈林, 杨炳渊.一种识别复杂连接结构刚度参数的实用方法[J].振动工程学报, 2002, 15(3):323-326
[4]杨炳渊, 宋伟力, 阳华, 等.太阳电池阵板间铰链副刚度参数辨识[J].振动与冲击, 2000, 19(1): 12-14
[5]MSC.Software Corporation.MSC NASTRAN Quick Reference Guide[G], 2003
[6]王巍, 于登云, 马兴瑞.航天器铰接结构非线性动力学特性研究进展[J].力学进展, 2006, 36(2): 233-237
