基于ATMEGA128单片机的节水灌溉系统设计
2010-05-18王晓健
刘 凯,王晓健
(潍坊职业学院,山东 潍坊 261031)
发达国家发展高效农业的一个重要途径是灌溉管理的自动化,美国、日本、以色列等发达国家已采用了先进的灌溉系统,采用先进的节水灌溉制度,由传统的充分灌溉向非充分灌溉发展,对灌区用水进行监测预报,实行动态管理,采用遥感技术,监测土壤墒情和作物生长,开发和制造了一系列用途广泛、功能强大的数字式灌溉控制器,并得到了广泛的应用。地处干早缺水地带的以色列是世界上微灌技术发展最具有代表性的国家,目前全国农业土地基本上实现了灌溉管理自动化,并且普遍推行自动控制系统,按时、按量将水、肥直接送入作物根部,水资源利用率和单方水的粮食产量都相当高。我国节水灌溉自动化研究仍处于起步阶段,自动化程度低。目前开发的自动灌溉控制系统还处于研制、试用阶段,并且多数是小规模实验和理论的探讨,而且开发出来的产品价格昂贵。本文介绍的单片机模糊控制节水灌溉系统属于“大规模灌溉工程中计算机监控系统”的一个子课题,即下位机部分,希望能够早日投入使用。
1 灌溉控制系统的组成及工作原理
该系统是通过单片机对微灌工程的主要设备进行监测、控制以及各种信息处理,系统简图如图1所示。
滴灌系统主要组成及工作原理如下。

图1 灌溉控制系统简图
(1)首部。包括水泵、过滤器、肥料罐、压力表和流量计等。 其作用是从水源抽水加压(1×105~3×105Pa),施入化肥溶液(化肥罐容积50~100 L),过滤杂质,最后将水、肥输进干管。
(2)管道系统。管道系统包括干管、支管和毛管。干、支管内径一般为37.5~100 mm,毛管内径为10 mm左右,均由高压聚乙烯或聚氯乙烯制成。为预防生物堵塞,往往在塑料中添加炭黑,各级管道之间均用二通、三通、四通、旁通连接。
(3)滴头。滴头的作用是使水流经过微小的孔隙消能,然后成水滴状灌入土壤。
(4)土壤湿度传感器。用来采集数据的主要部分,是实现自动灌溉的重要环节。土壤湿度传感器一般是采集土壤的水吸力大小信号,也叫土壤水分传感器。通过土壤湿度传感器来测量土壤的湿度,以便掌握真正的灌溉需求和土壤的保水能力。
(5)单片机控制系统如图2所示,主要由ATMEGA128微处理器、AT45DB161存储芯片、DS1302时钟芯片、MAX232串行通信芯片等部分组成。

图2 单片机控制系统
单片机控制系统采用ATMEGA128作为核心控制芯片,上位机采用组态作监控。单片机与PC机通过串行通信RS232接口连接。由于存储数据量大,该系统为单片机扩展AT45DB16 Flash存储器。多组土壤湿度传感器可以通过单片机内置的8通道10位A/D转换输入端与单片机直接相连,完成信号的A/D转换及信号传送。单片机根据接收到的信号进行分析处理,按照模糊控制规则发出控制信号,通过放大驱动电路控制电磁阀动作,完成对某些区域土壤的灌溉。
2 节水灌溉系统模糊控制决策分析
模糊控制是建立在人类思维模糊性的基础上的。模糊控制与传统自动控制有着本质的区别,它能较好地仿效和描述人的思维方式,总结和反映人的经验,对复杂事物和系统可进行模糊度量、模糊识别、模糊推理、模糊控制和模糊决策。模糊控制的核心在于它具有模糊性的语言条件语句,作为控制规则去执行控制。
与传统的控制方法相比,模糊控制具有如下特点:
(1)模糊控制系统的设计是基于人的丰富知识和经验,使用语言方法,使它不依赖于系统精确的数学模型,适用于无法精确解析建模的复杂过程与模糊性对象。在本系统中,由于作物灌溉模型的建立受不同作物生长规律、季节、气候环境等一系列因素的影响,因而建立适应作物生长规律的灌溉模型较困难,所以采用模糊控制规则,而不需要建立精确的数学模型。
(2)对于具有一定操作经验的操作者,模糊控制方法易于掌握。
(3)模糊规则和合成推理是基于专家知识或熟练操作者的成熟经验,并通过学习不断更新,因此它具有智能性和自学性。
(4)控制过程中不需花时间进行复杂运算,提高了系统的时效。
2.1 定义输入量、输出量模糊子集和语言论域等级
在灌溉中,土壤湿度是决定作物灌溉与否的重要指标。在设计中,以土壤湿度的误差e及误差变化率ec作为输入变量,系统采用双输入单输出模糊控制,其结构框图如图3所示。
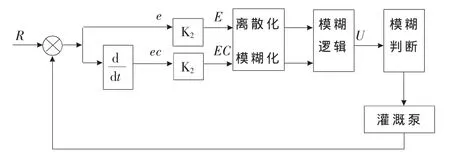
图3 模糊控制结构图
本系统采用的模糊控制算法是合成推理的查表法。微机先采集土壤湿度的精确值l,然后将该精确值与给定的土壤湿度值 l0相比较得到误差信号 e=Δl=l-l0,并计算出误差变化率ec,然后对输入e和ec及输出变量u进行模糊化。考虑到节水灌溉实际条件和控制精度,分别定义模糊化后的误差E、误差变化率EC和控制量的变化 U的模糊语言变量分为 7级:{负大,负中,负小,零,正小,正中,正大},简记为:{NB,NM,NS,ZO,PS,PM,PB},其论域设为:

2.2 输入量与输出量的模糊化过程
把精确量e、ec转化为模糊量,一般如果精确量X的实际变化范围为[a,b],将[a,b]区间的精确变量转换为[-3,+3]区间变化的变量Y,采用如下公式:
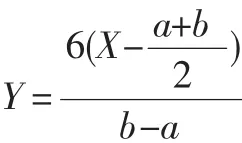
由上式计算出的Y值若不是整数,可以把它归入最接近于Y的整数。从而得到相应的等级值E和EC的模糊量,这样就把精确集转化为模糊集,以后只讨论在[-3,+3]区间内的模糊子集分布。
根据农业部门长期对节水灌溉实践的总结,得出了模糊控制规则表并且分别设定E、EC和U的隶属函数赋值表,如表1所示。
2.3 模糊控制响应表的生成
对于双输入单输出模糊控制器,根据模糊控制规则表得出其控制系统的控制规则格式可写成下列形式:

实际上是由7×7条模糊控制规则组成,其中一些规则可以合并,共合并为25条。下面以第1条模糊控制规则为例来说明其具体运算方法,其他可以此类推。即

并求出与上述条件语句对应的模糊关系矩阵,在求得模糊关系矩阵R之后,根据公式U=(E×EC)ToR可求得在输入E和EC作用下的输出模糊向量集,采用隶属函数最大原则求取各相应控制量,可得该系统的模糊控制表,如表2所示。
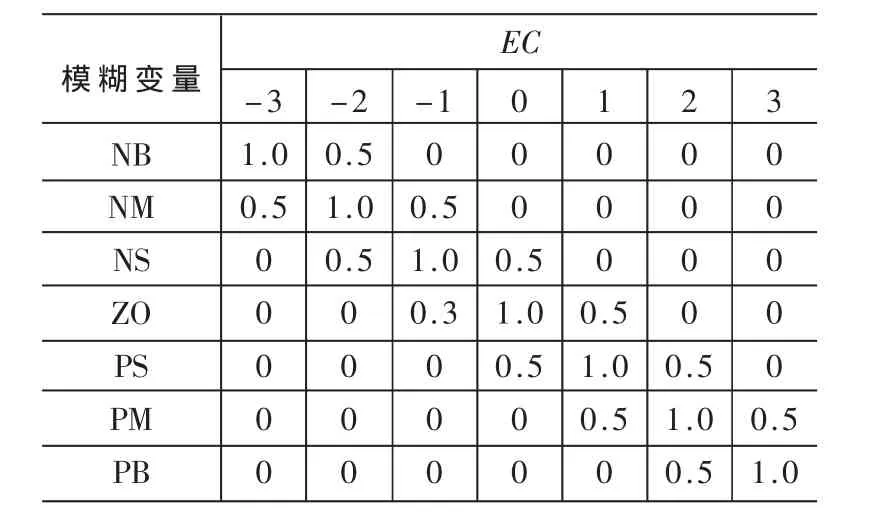
表1 误差EC的隶属函数赋值表
2.4 模糊控制过程
将模糊控制表2存入程序中,在控制过程中,将实时采样数据与灌溉定额数据库中相应数据比较,得到一定时间内土壤湿度的偏差,同时计算出偏差变化率,经模糊化处理再与模糊控制表相应行列内容比较,查出控制变量U,进行精确化处理,最后控制输出电路,达到控制灌水量的目的。
该模糊控制灌溉系统不依赖于精确的数学模型,它是以单片机为硬件结构,模糊规则和合成推理是基于长年的手动灌溉经验,并可通过学习不断更新,因此具有智能性和学习性,同时具有数字控制的精确性和软件编程的柔软性。

表2 U的模糊控制表
[1]张璐.节水灌溉自动控制技术的应用[J].水土保持研究,2007,14(5):385-387.
[2]唐元海.中国节水灌溉事业的发展与展望[J].青海水利,1999(2):26-35.
[3]张兵,袁寿其,成立.节水灌溉自动化技术的发展及趋势[J].排灌机械,2003,21(2):37-41.
[4]孙威,毛罕平,左志宇,等.基于单片机的节水灌溉自动控制器的设计[J].安徽农业科学,2007,35(29):9228-9230.
[5]吴普特,牛文全.节水灌溉与自动控制技术[M].北京:化学工业出版社,2002.
[6]周和平,赵登明,禹锋.我国节水灌溉灌水器研究现状与展望[J].中国农村水利水电,2007(5):68-70.
