太阳电池方阵自动全追踪系统设计
2010-05-11汪临伟
汪临伟
(九江职业技术学院,九江 332007)
太阳电池方阵自动全追踪系统设计
汪临伟
(九江职业技术学院,九江 332007)
0 引言
在我国太阳能和可再生能源技术已列入国家科技攻关计划,光伏产业发展很快,但光伏设备的研发及制造、光伏科学理论的研究还落后发达国家很多。现在大量使用的太阳电池方阵都是受光面倾斜,倾角固定。而我们知道太阳能存在密度低、间歇性、光照方向和强度随时间不断变化,从地球上看,太阳在一天之内从东到西环绕地球,任何时刻太阳光的辐照度都是:I=I0cos,这里I0为垂直受光面的太阳辐照度的最大值,而 为太阳方向与受光面法线间的夹角。这种太阳电池方阵接受太阳能在一天中总辐照量就会少很多。笔者经过潜心研究,认为如果采用太阳电池方阵全追踪系统使 为零或接近零,则相同面积的太阳电池方阵接受的总辐照量将会大大增加,光伏发电系统的发电量将会提高35%左右[1]。
本系统采用智能芯片自动检测太阳光的方向,调整太阳电池方阵的朝向,实现全追踪,使其接受太阳辐照量最大,有效提高太阳能的利用率。
1 自动追踪的检测
自动追踪的检测是太阳电池板全追踪系统的控制核心,是系统研究工作的重点。检测太阳光光强的方法有定时法、坐标法、太阳能电池板光强比较法和光敏电阻光强比较法[4]等等。定时法电路简单,但系统的控制精度较差;坐标法控制精度较高,但控制电路复杂;光强比较法使系统的太阳能利用率不能达到最佳;光敏电阻光强比较法电路实现最简单,对太阳能的利用率最大。设计采用的是光敏电阻光强比较法,是利用光敏电阻在不同光照时阻值不同的原理,来实现太阳电池板全追踪。它采用球型光敏探测头,竖直固定在太阳电池方阵上,在球型光敏探测头东、西、南、北、顶部各开一圆孔,安装聚光镜会聚光线,内部安装接收东、西、南、北方向光线的光敏电阻阵列(光敏电阻并联),顶部光敏电阻阵列为误差探测电路。
当太阳光线不是垂直照射太阳电池方阵时,球型光敏探测头的东、西、南、北方向一定有至少一面接收到会聚的太阳光线,由于光敏电阻在光照时阻值会发生较大的变化,我们用智能芯片检测出接收光线的那一面,驱动液压执行机构,使太阳电池方阵正对太阳(粗调)。
粗调完成后,会聚的太阳光线一定会落在顶部误差探测的光敏电阻阵列上,顶部误差探测的光敏电阻阵列如图1所示。

图1 误差探测光敏电阻阵列
误差信号是如何检测的呢?A、B、C、D为中心区光敏二极管,E、F、G、H为辅助光敏二极管,其中E、F为一对,G、H为一对,误差检测电路如图2所示。
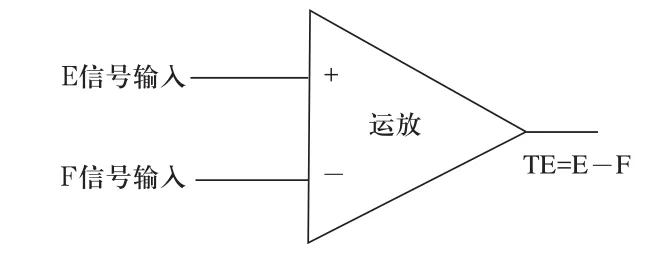
图2 误差检测电路
当太阳会聚光线偏离中心区时E、F或G、H两对辅助光敏二极管的受光量一定不一致,经误差检测电路检测产生伺服电信号TE=E-F(或G-H)就可知太阳电池方阵偏离的方向,驱动执行机构进行调整(细调)。
当太阳会聚光线在中心区时,光束投射到中间的4只光敏二极管上,转换成的电信号经运算后,产生误差信号FE=(A+C)-(B+D),驱动执行机构进行调整(精细调整)。
当东、西、南、北方向的光敏电阻阵列、A、B、C、D中心区光敏二极管,E、F、G、H辅助光敏二极管全部检测出无较强光线时,应该是黑夜或阴雨天,此时太阳电池方阵不跟踪;当东、西、南、北方向的光敏电阻阵列检测出无较强光线,E、F、G、H辅助光敏二极管、A、B、C、D中心区光敏二极管检测出有较强光线但误差接近为零时,实现全追踪。
2 自动追踪的系统设计
太阳电池方阵自动全追踪系统是由太阳电池方阵、球型光敏探测头、AVR单片机、驱动电路、电磁阀、液压执行机构、电源电路组成,如图3所示。
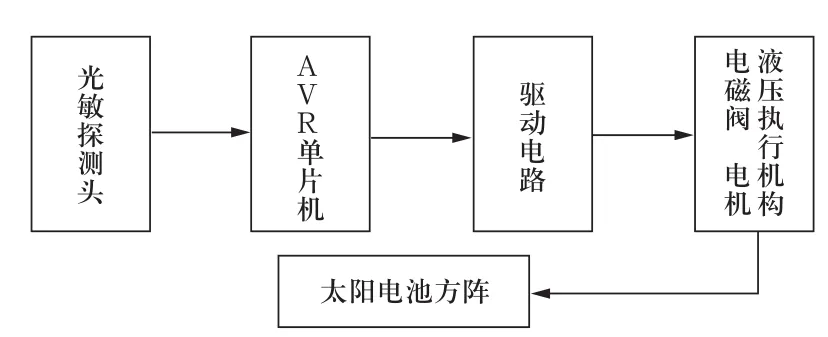
图3 太阳电池方阵自动全追踪系统
光敏探测头探测太阳的位置,AVR单片机设置极限值(暗夜、阴雨光线很弱时太阳电池方阵不追踪),当光线达到一定值时检测东、西、南、北方向的光敏电阻阵列,阻值小的说明被太阳光照射到,初步确定太阳的位置,AVR单片机进行数字处理后驱动相应电路与执行机构调整太阳电池方阵的朝向(注意设置运动极限值:限位装置具有东、西、南、北四个方位的极限限位功能。采用双重限位控制结构,即控制信号限位和机械限位,保证了设备可靠地工作。),使光敏探测头顶部A、B、C、D中心区光敏二极管和E、F、G、H辅助光敏二极管受光,AVR单片机再检测EF、G-H的误差电压,细调太阳电池方阵的朝向,再检测FE=(A+C)-(B+D)误差信号,对太阳电池方阵的朝向进行精细调整。将AVR单片机进行设置,精细调整一次后下次对太阳电池方阵进行调整需有一定的时间间隔,避免电磁阀、电机、液压执行机构等频繁启动,损耗电能。AVR单片机通过驱动电路控制液压泵的起动、停止,使液压系统带动太阳电池方阵始终朝向太阳,本系统之所以采用液压系统而不采用其他控制系统的主要原因是:液压系统功率——重量比大。在同样功率的控制系统中,液压系统体积小,重量轻。这是因为对机电元件,例如电动机来说,由于受到激磁性材料饱和作用的限制,单位重量的设备所能输出的功率比较小。液压系统可以通过提高系统的压力来提高输出功率,这时只受到机械强度和密封技术的限制。在典型的情况下,发电机和电动机的功率——重量比仅为16.8W/N,而液压泵和液压马达的功率——重量比为168W/N,是机电元件的10倍。在航空、航天技术领域应用的液压马达是675W/N。
3 AVR单片机及控制流程
图4为AVR单片机控制流程。
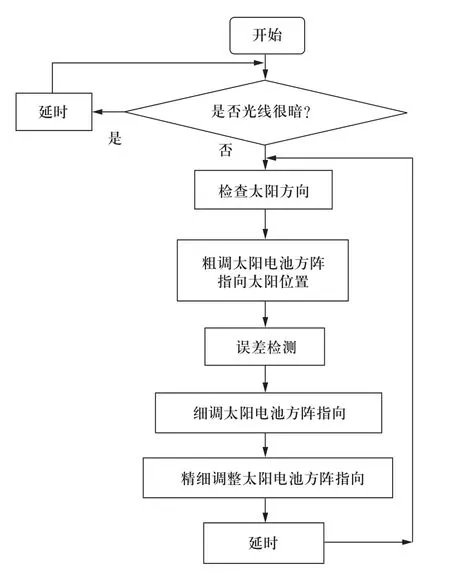
图4 AVR单片机控制流程
4 结束语
本文介绍了太阳电池方阵自动全追踪系统,能使太阳电池方阵自动保持与太阳光垂直,该系统全追踪准确性高、可靠性强,能有效地提高太阳能的利用率和光伏发电系统的效率。单轴太阳能追踪系统比固定式系统能增加25% 的功率输出,而太阳能全追踪系统比固定式系统能增加4l% 的功率输出。符合环保、节能社会发展的需要,具有良好的经济效益与社会效益,具有研究意义和推广价值。
[1]薛建国.基于hym8563和单片机的低功耗太阳电池自动跟踪系统设计[J].沈阳工程学院学报(自然科学版),2005(2):113-116.
[2]salah abdallah. two axes sun-tracking system with plc control[J]. energy conversion and management, 2004,45:1931-1939.
[3]王雪文.太阳能电池板自动跟踪控制系统设计[J].西北大学学报(自然科学版),2004,34(2):163-164
[4]zhang bo-quan, yang yi-min. status and trend of wind &photovoltaic power development [j]. electric power, 2006,39(6):65-69.
The design of solar cell phalanx with all the tracking system automatically
WANG Lin-wei
太阳能光伏技术的应用在各国已成为竟相开发的绿色能源,在我国太阳电池方阵安装多采用固定朝向,而太阳能存在密度低、间歇性、光照方向和强度随时间不断变化的特点,为提高太阳能的利用率,笔者设计了一种太阳电池方阵全追踪系统,使太阳电池方阵始终正对着太阳。
球型光敏探测头;太阳电池方阵;全追踪;AVR单片机;液压执行机构
汪临伟(1969-)男,副教授,主要研究方向为电气自动控制。
TP391
B
1009-0134(2010)12(下)-0149-04
10.3969/j.issn.1009-0134.2010.12(下).54
2010-10-21
