基于DSP 的闭环SPWM的实现方法
2010-05-10耿后来吴卫民陈建明李春龙
耿后来,吴卫民,陈建明,李春龙
(1.上海海事大学电力传动与控制研究所,上海200135 ;2.广州国新电子科技有限公司,广东 广州510000)
0 引 言
模拟控制技术经过多年的发展已趋成熟,然而模拟控制因其硬件固有的缺点以及不易实现先进的控制策略而制约了逆变器的发展。数字化控制能消除模拟系统中控制参数易漂移等缺点,因而能更好地提高系统的稳定性。随着高速数字信号处理器DSP 的问世,数字控制系统以其高速性、通用性、控制灵活和可实现先进控制算法等优点,成为了现代电力电子技术发展的主导思想。
本文基于TMS320LF2407 数字信号处理器,给出了产生SPWM波形的方法,数字PID 实现、电压单闭环控制策略以及PI 算法的实现,通过搭建一逆变器,运用DSP 实现了闭环SPWM控制。
1 系统基本结构
图1 所示为单相全桥逆变器数字控制系统框图。逆变器以TI 公司的数字信号处理器TMS320LF2407为控制核心,采用双极性SPWM控制,选取IPM功率模块作为开关器件。
DSP 通过A/D 转换模块实现对输出电压的采样,经过电压闭环PI 控制,数字基准给定与进行A/D转换后的反馈信号相减,其差值进行PI 调节后,再与片内定时器产生的三角载波交截,输出带有死区的控制信号,经功率驱动模块放大,驱动单相逆变器开关器件输出正弦电压,此外为了防止IPM模块因过热过流而损坏,对系统还加了过热过流保护。

图1 单相全桥逆变器数字控制框图
2 软件实现
2.1 SPWM 控制的 基本原 理[1 ,4 ,6]
SPWM控制模式主要有自然采样法和规则采样法。自然取样法的主要问题是SPWM波形每一个脉冲的起始和结束时刻对于三角载波的中心线不对称,因而求解困难,同时这种方法还占用大量内存,因此通常采用规则采样。如图2 所示,使每个脉冲的中点都以相应的三角波中点为对称,这样则使得计算大大简化。若以单位量1 代表三角载波的幅值Utri,则正弦波的幅值Um就是调制度m,m=Um/Utri,再由图2 的几何关系可求出脉宽时间为:

对于DSP 采样而言,若一个周期内采样n 个点,则第i 个脉冲的占空比D为:

图2 SPWM调制示意图

式中,N为载波比,为开关频率fk和工频fg的比值即

2.2 SPWM 波形的 DSP 实现[1-5]
利用DSP 中的事件管理模块(EVA/B)可以产生PWM脉冲。DSP 中的三角载波是通过将设置定时器为连续增/减计数模式来实现的,将正弦波制成表格,设定好定时器之后,在每个开关周期,程序从参考正弦波表中读取相应数字量作为给定,减去A/D 转换后的反馈电压,进行PI 调节后将输出值赋给比较寄存器CMPRx。定时器从0开始递增计数到周期值TxPR,接着从TxPR 递减计数到0,然后开始下一个周期。定时周期计算如下式:
式中,fM为DSP 的时钟频率;fk为开关管的频率,即输出PWM的频率。
对于高有效PWM输出端口,当计数值上升到比较值CMPRx 时,输出高电平;当计数值下降到比较值CMPRx 时,则输出为低电平。为了避免逆变桥的同一组桥臂的上下开关器件直通,两路互补的PWM信号必须设置死区时间。通过设定死区时间寄存器(DBTCONx),TMS320LF2407 可以实现死区时间的设置,本文取1 μs 。
2.3 增量式数字 PI 实现[2 ,7]
计算机只能处理离散的数字量,在采集输入信号时,必须先将连续的模拟量转换成离散的数字量;输出则是把离散的数字量转换为连续的模拟量。对于连续PID 控制表达式:


式中,TD为微分时间常数;TI为微分时间常数。
采样控制系统用采样时刻的偏差值来计算控制量,因此控制规律公式用数值计算的方法近似,并表示为递推形式的增量算法:

对于增量式PI ,则KD为0,则增量式PI 中

通常的PID 为:

则当TD为零时,
求出α、β,经过定标后即可。PI 的控制框图如图3所示。
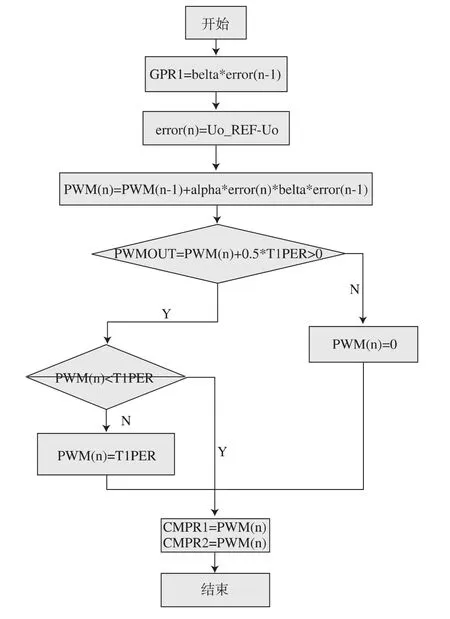
图3 PI 控制框图
2.4 系统控制方案
系统分主程序和中断服务程序两部分,中断服务流程框图如图4 所示。主程序主要为:对系统常量、变量、事件管理器、A/D 转换模块进行定义,开中断后循环等待中断到来,中断到来则执行中断服务流程。
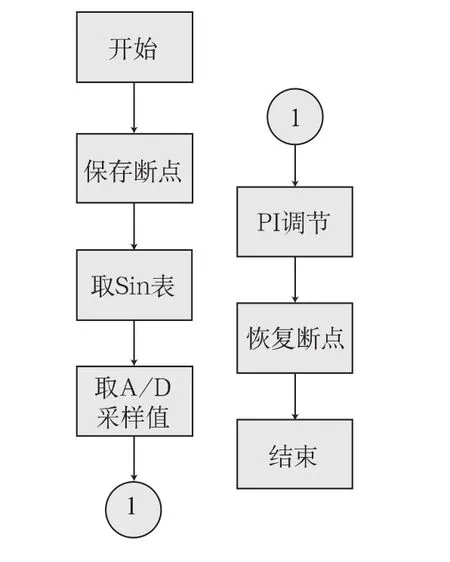
图4 中断服务流程框图

图5 系统闭环输出波形
3 实验结果及结论
根据以上程序思路编写了电压闭环程序,并且搭建了单相逆变器,实际测得输出波形如图5 所示。可见,输出电压为正弦波形,并且由图示波形可看出其周期为20 ms ,这样的结果与程序中的设定完全相吻合,从而也验证了软件设计思想的正确性。显然这种方法还能够应用在具有相似要求的其他领域之中,具有较大的实用价值。
[1]何苏勤,王忠勇.TMS320C2000 系列DSP 原理及应用技术[M].北京:电子工业出版社,2003.
[2]郑 红,隋强强,周 星.DSP 应用系统设计实例[M].北京:北京航空航天大学出版社,2008.
[3]赵世廉.TMS320X20240xDSP 原理及应用开发指南[M].北京:北京航空航天大学出版社,2007.
[4]许德鸿.电力电子技术系统建模及控制[M].北京:机械工业出版社 ,2005.
[5]魏 光,李群湛.基于DSP 的SPWM 优化算法研究[J ].微计算机信息,2008 ,24 ,11-2.
[6]瞿成明,陈 进,江 明,周 俊.SPWM波形发生器DSP 实现的一种方法[J ].机电工程技术,2007 ,36(1):69-71.
[7]陶永华.新型PID 控制及其应用[M].北京:机械工业出版社,2005.
