车载GPS/DR组合在移动道路测量系统中的应用
2010-04-18刘演志欧海平
刘演志,欧海平
(广州市城市规划勘测设计研究院,广东广州 510060)
车载GPS/DR组合在移动道路测量系统中的应用
刘演志∗,欧海平
(广州市城市规划勘测设计研究院,广东广州 510060)
以GPS/DR组合导航为基础,采用机动载体基于“当前”统计模型的联邦卡尔曼滤波方法,通过对两导航系统定位信息的融合,实现低成本动态测量组合在移动道路测量系统中的应用。实测结果表明,通过GPS/DR组合数据的联邦滤波处理,很好地解决了城市道路测量过程中单一GPS定位由于信号缺失以及其他影响因素带来的定位失效问题。GPS/DR组合导航为城市移动道路测量系统提供了很好的定位数据保障。
GPS/DR组合;卡尔曼滤波;联合卡尔曼滤波
1 前 言
GPS全球定位系统可以提供全球范围的卫星导航定位数据,用户通过GPS接收机捕获的GPS信号实时确定自身的位置状态。但GPS接收机在城市中受到高大建筑物、桥梁、隧道等的遮挡时,会造成信号失锁。因此可采用多个系统来组建成优势互补的组合导航系统。
GPS/DR组合定位不但可以很好地解决GPS单独定位时,由于卫星信号被遮拦而造成定位盲区的问题,同时可以有效抑制DR定位时的误差累积,极大地提高了车辆动态定位系统的定位精度和可靠性,因而在实际生产中得以广泛应用。GPS/DR组合定位系统选用的是低成本的航位传感器来获取车辆航位信息,可以通过数据融合处理的卡尔曼滤波方法,有效地融合GPS与DR两者的定位信息,进而提高系统的定位精度。
2 GPS/DR组合导航系统融合算法实现
2.1 GPS/DR组合系统
航位推算DR(Dead Reckoning)是一种经典的动态位置推算技术,常用于导航系统中。其基本原理为:利用航向传感器提供的航向角、俯仰角以及里程传感器所提供的位移增量来推算载体的位置,如图1所示。
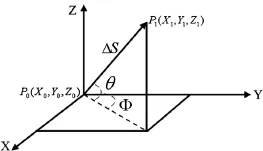
图1 航位推算定位原理图
其中:△S为位移增量;θ为俯仰角;Φ为航向角。
在已知初始坐标的前提下,可以得到航位推算的公式如下:

式(1)表明,航位推算过程需要通过其他途径获得初始时刻的坐标P0(X0,Y0,Z0)、航向角Φ、俯仰角θ,并实时获得前后时间间隔的距离变化量△S才可求解出下一时刻的坐标P1(X1,Y1,Z1);然后以P1点作为已知点,继续上面的过程,就可以在连续的时间段中推导出对应运动载体的在两时刻间的轨迹变化。航位推算是一个前后坐标累加的过程,随着推导时间的推移,各时刻的测量误差都会累积到后面点位,因此航位推算系统的误差是一个发散的过程。如果不适当的补偿积累误差,运动载体的位置计算将越来越偏离实际航向,因而,单独的航位推算系统不能用来进行长时间的定位。
当DR系统与GPS系统组合,车载GPS通过采用实时定位的方法,接收GPS卫星信号,就可以直接获得运动载体在地心坐标系统下对应时刻的三维状态分量P(xi,yi,zi)。GPS系统提供的绝对位置可以为DR系统提供航位推算的初始值,并对DR系统进行定位误差的校正和系统参数的修正,同时DR系统的连续推算具有较高的相对精度,可以补偿GPS系统定位中的随机误差和定位的断点,使定位的轨迹能够平滑。因此GPS/DR组合导航系统理论上可以满足组合定位的要求。
2.2 GPS/DR组合的联邦卡尔曼滤波
Kalman滤波方法是一种对动态系统进行实时数据处理的有效方法,其通过一系列的观测量,采用相应的滤波算法估计出所需的观测值。随机线性离散系统的运动可用带有随机初始状态、系统过程噪声及观测噪声的差分方程和离散型观测方程来描述。设随机线性离散系统的状态方程和观测方程为:

式中:Xk是系统的n维状态向量;Zk是系统的m维观测序列;Φk,k-1为n×n维非奇异状态一步转移矩阵;Γk,k-1为n×p维系统过程噪声输入矩阵;Hk是m×n维观测矩阵;W(t)是p维系统随机过程噪声序列;V(t)是m维系统随机观测噪声序列。
如果该随机线性离散系统噪声满足W(t)与V(t)相互独立,系统过程噪声方差阵Qk非负定,系统观测噪声方差阵Rk正定,则有随机线性离散系统基本Kalman滤波方程[1]如下:
状态一步预测

一步预测误差方差阵

滤波增益矩阵

状态估计

估计误差方差阵

式(4)~(8)即为随机线性离散系统的Kalman滤波方程。只要给出初值和P0,依据k时刻的观测值Zk,就可以递推计算得k时刻的状态估计…)。对于非线性系统可以采用线性化的扩展的卡尔曼滤波EKF[2]以及无迹粒子滤波UKF[3]。
针对GPS/DR组合的导航系统,我们可以设计一个简化的联合Kalman滤波器[4,5],将GPS和DR子系统各采用一个独立的Kalman滤波器,而主滤波器不进行滤波处理,只对来自不同传感器的导航数据完成数据的加权综合。在GPS无信号遮拦的情况下其定位精度要胜过DR,因此在定权过程中主要考虑GPS的滤波数据,DR子系统只是作为辅助信息,在特殊情况下对整个系统进行补充说明。这种分散式滤波结构,不但没有降低组合系统的定位精度,而且其计算量小,稳定性高,具有较强的容错能力[6]。
为了联合信息处理的方便,现定义GPS/DR组合导航系统的公共状态变量为X,GPS子系统的状态变量为X1,DR子系统的状态变量为X2,分别表示如下:

向量X中xn为北向上的坐标分量,vn为北向上的速度分量,an为北向上的加速度分量,同理有东向上的各分量xe、ve、ae,以及各子系统对应的状态变量。
参考通用联合Kalman滤波器的结构,去除其中的主参考系统,但进行主滤波器的信息反馈,这样就可得到如图2所示的GPS/DR组合导航联合Kalman滤波器结构。其显著的特点就是在保证滤波精度的同时,能让主系统的计算量最小化,而且系统整体向前滤波的速度最快,达到最优设计的目的。

图2 联合Kalman滤波结构图
3 实测结果
为了考察联合滤波算法在GPS/DR组合定位系统中的滤波效果,以下通过对某城市高架路实测数据的处理分析,来加以说明。
现已知运动载体从坐标点 O(3470740.604,55393.705)出发,开始初速度为零的变加速运动。对GPS子滤波系统可取相关参数为:

初始加速度取ae(0)=an(0)=10 m/s2,采样周期T=0.1 s,对于子滤波器中加速度的方差自适应算法,取amax=amin=10 m/s2,并取机动加速度的相关时间常数τae=τan=1 s。依据经验,初始预测噪声协方差阵可取:P1(0)=diag{10,1,0.02,10,1,0.02},观测协方差阵R1=diag{0.120.12};对于DR子滤波器系统,给出初始参数为:初始预测噪声协方差阵P2(0)=diag{10,1,0.02,10,1,0.02},DR系统观测协方差阵R1=diag{0.0520.42}。联邦滤波过程中,依据 GPS的定位质量即PDOP来确定联邦滤波中的分配系数。车辆运动轨迹局部滤波与联合滤波前后对比结果如图3、4所示。

图3 GPS单独动态定位滤波轨迹图

图4 GPS/DR组合定位滤波轨迹图
图3 为车载GPS在城市高架行驶过程滤波后的定位轨迹,车辆在行驶过程中由于受到桥面遮挡,城市隧道等多种因素的干扰,导致了GPS信号的失锁而造成定位信息的缺失,如图3中标识2与3处分别为车辆通过两条较长隧道时无法进行GPS来定位,此刻GPS与DR组合的双系统,GPS在失锁的前一时刻,给定DR初始坐标和方位角,通过DR系统进行车辆的航位推算。最后整个车载导航系统将以GPS定位为主,DR推算为辅,通过两者信息的融合,稳定有效地给出车辆的运动轨迹如图4所示。通过图3与图4中对应标识相比较,GPS/DR组合定位有效提高了单一系统动态定位的可靠性。
4 总 结
通过GPS/DR组合数据的融合,采用联合的Kalman滤波方法,依据GPS的动态定位精度来确定联合滤波过程中的信息分配,实现以GPS定位数据为主,DR定位数据为辅的主次滤波。当GPS定位正常时,由于其本身定位精度较高,因而其在联合滤波结果中所占的权重也就相对较大,如图3中标识1处所示;但是一旦GPS信号受到较大的干扰,这种情况下就必须以DR定位数据为主,如图3中标识2、3等部分为车辆通过隧道,此刻DR在联合滤波中的权则取β2=1,而GPS的权重只能为β1=0。待GPS重新捕获信号后可以通过中断前后两时刻的GPS定位数据对DR航向角进行校正,从新获得定位结果。其最终组合定位结果见图4,通过GPS与DR定位数据的融合,能很好地确定车辆运动轨迹,达到了DR与GPS组合导航低成本、高精度以及实时性的定位要求。为现代移动测量系统提供了很好的数据支持。
[1]付梦印,邓志红,张继伟.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003
[2]房建成,申功勋.车载DR系统自适应扩展卡尔曼滤波模型的建立及仿真研究[J].中国惯性技术学报,1998,6 (3),24~28
[3]胡士强,敬忠良.粒子滤波算法综述[J].控制与决策,2005,20(4)
[4]Carlson,N.A.Federated filter for fault-tolerant integrated navigation system[J].Proc.of IEEE PLANS’88,Orlando,FL 1988.110~119
[5]Felter,S.C An overview of decentralized Kalman filter techniques[C].Southern Tier Technical Conference,1990,Proceedings of the 1990 IEEE.79~87
[6]房建成,申功勋,万德钧.一种自适应联合卡尔曼滤波器及其在车载GPS/DR组合导航系统中的应用研究[J].中国惯性技术学报,1998,6(4):1~6
Application of GPS/DR Integration in Mobile Mapping System
Liu YanZhi,Ou HaiPing
(Guangzhou Urban Planning and Design Survey Research Institute,Guangzhou 510060,China)
The fusion algorithm of GPS/DR integration is studied based on Kalman filtering theory and federal Kalman filtering model is founded based on vehicle current statistical model.With the integration of location information of the two navigation systems make low-cost combination of dynamic measurement in mobile mapping system come true. Measured results show that the GPS/DR integration with the federated filter data processing,a good solution to the urban road course measurement as a result of a single GPS positioning signals missing,as well as other factors brought about by the positioning of the impact of failure.GPS/DR integrated navigation for urban mobile mapping system provided a good measurement system of positioning data.
GPS/DR integrated positioning;Kalman filtering;Federal Kalman filter
1672-8262(2010)02-65-03
P228
A
2009—07—13
刘演志(1981—),男,硕士,现主要从事工程测量方面的研究。
