基于模糊自适应整定PI感应电动机直接转矩控制的研究
2010-04-16汤仁彪
汤仁彪
(江阴职业技术学院电子系,江苏 江阴 214405)
1 引言
一般直接转矩控制系统中的速度调节器采用传统的PI控制器,在确定PI参数的过程中,由于PI参数的整定值具有一定局域性的优化值,而不是全局性的最优值,因此,PI控制无法从根本上解决动态品质和稳态精度的矛盾[1]。特别是对于高精度、高动态性能的调速,传统的PI控制不能满足其要求。相比之下,模糊参数自适应控制器利用模糊推理,实时调整PI参数,可以使PI控制适应异步电动机运行过程的变化,获得了良好的控制性能[9、10]。本文在MATLAB中用M文件建立了一种模糊推理系统,利用SIMULINK/PLECS对异步电动机的直接转矩控制进行了模糊自适应PI控制的仿真研究,并且对传统PI速度调节器进行比较,验证了该模糊算法的有效性。
2 异步电动机直接转矩控制基本原理
2.1 异步电动机数学模型
在理想假设条件下,异步电动机在α,β坐标下各方程如下[2]。
磁链方程:

电压方程为:
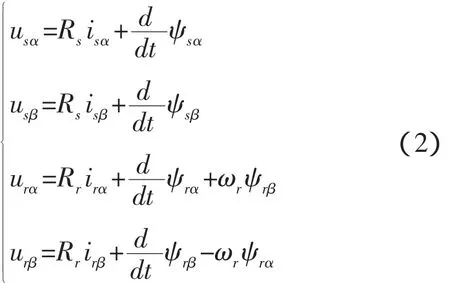
转矩方程:
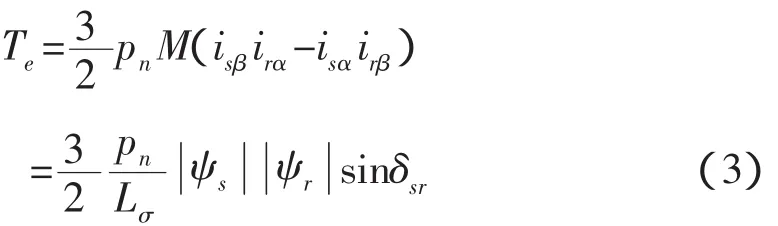
式中:Lσ=(LsLr-M2)/M2;δsr为定子与转子磁链的角度差。pn为电动机的极对数。由式(3)可知,只要能快速改变定子磁链矢量旋转速度,就可以获得快速的电磁转矩动态响应。
2.2 异步电动机直接转矩控制系统框图
异步电动机直接转矩控制系统框图如图1所示[3]。它包括速度调节器、转矩控制、磁链控制等。该系统采用定子磁场定向,在α,β坐标系下计算和控制异步电动机的转矩,将实际转矩、磁链分别与给定值进行比较,定子磁链与电磁转矩控制的两个状态切换分别由两个滞环比较器实现,形成转矩、磁链的闭环控制。

图1 直接转矩控制系统框图
3 模糊自适应PI控制器的设计
3.1 自适应模糊PI控制器结构
模糊自适应PID控制系统主要由参数可调整PID和模糊推理系统两部分组成[5],以误差e和误差变化率ec作为模糊控制器的输入,根据PI参数Kp和Ki与E和EC之间的模糊关系,在运行中不断地检测e和ec,根据模糊控制原理把ΔKp、ΔKi作为输出量,从而对这2个参数进行在线修改,以满足不同的E和EC对PI控制参数的不同要求,从而使系统具有良好的动、静态性能和抗干扰能力,其结构如图2所示。

图2 自适应模糊控制器结构
3.2 模糊控制器的规则库
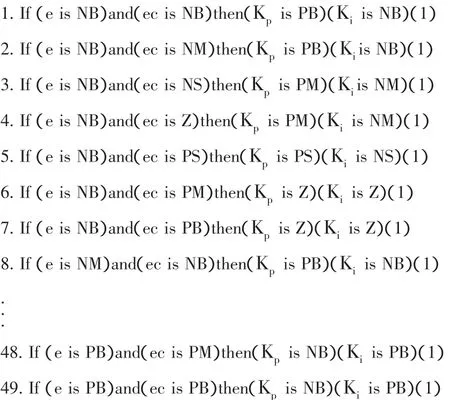
Fuzzy Logic Control的设计是将速度误差e、误差变化率ec,相应的模糊变量E、Ec的论域量变化在[-3,3],共为7个等级,取如下7个语言变量{PB(正大),PM(正中),PS(正小),Z(零),NS(负小),NM(负中),NB(负大)}[6]。 模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,然后在Matlab中建立M文件,用模糊逻辑工具箱中的命令得到模糊推理系统[7]。此处共有49条模糊规则如下:
4 仿真结果与分析
4.1 仿真模型的建立

图3 异步电动机的模糊自适应控制系统模型

图4 模糊自适应PI控制模型
利用SIMULINK与PLECS搭建了异步电动机的模糊自适应控制系统,如图3所示,其中模糊逻辑推理系统采用前面已建立的系统[8]。速度控制模块根据模糊推理系统的输出实时调整PI控制的参数,系统结构如图4所示。
4.2 仿真结果
异步电动机的参数220 V,Nn=1748.3 1/min,In=49.68 A,Pn=14.72 kW,其它采用PLECS中默认的参数仿真时间设置为6s。电机转矩负载为40N·m,在给定转速180rad/s下起动,3s时给定转速端突加负载20rad/s的扰动,扰动时间为0.2s。异步电动机在常规PI控制与模糊自适应PI控制下的电机转速、转矩曲线如图5、6所示。
从仿真曲线上分析,常规PI控制器在受到扰动后,转速产生了明显的变化,而模糊自适应PI控制器由于能实时在线修改参数Kp和Ki,转速基本保持稳定。
5 结束语
本文设计了一种模糊自适应PI控制器,通过模糊自适应PI控制器来自动调整Kp、Ki两个参数,使控制器具有更好的性能。仿真结果表明,模糊自适应PI控制器与常规PI控制相比,由于采用了模糊规则推理实时修改PI整定参数,使得系统各项性能指标明显优于普通PI控制器,从而取得了满意的系统动、稳态性能。
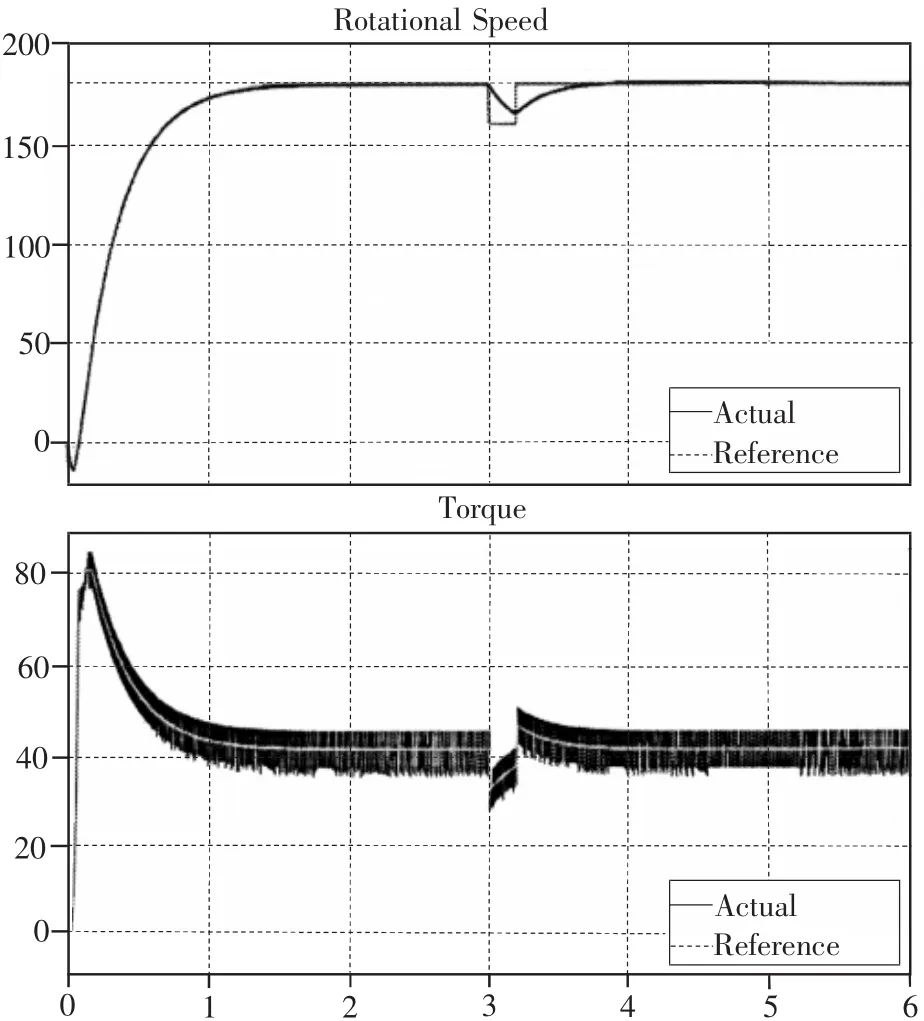
图5 常规PI控制电机转速、转矩曲线

图6 模糊自适应PI控制电机转速、转矩曲线
[1]纪志成,薛 花,沈艳霞.异步电机调速系统的新型模糊控制算法[J].电机与控制学报,2004,31(4):28-32.
[2]周扬忠,胡育文.交流电动机直接转矩控制[M].北京:机械工业出版社,2009,10.
[3]李 夙.异步电动机直接转矩控制[M].北京:机械工业出版社,2001.
[4]魏 欣,陈大跃.基于模糊空间矢量调制的直接转矩控制方案[J].系统仿真学报,2007,19(3):1281-1283.
[5]汪利峰,王耀南,陈正龙.基于预测模糊PI的异步电机控制[J].电气传动,2009,39(2):52-55.
[6]李友善,李 军.模糊控制理论及其在过程控制中的应用[M].北京:国防工业出版社,1993.
[7]刘金琨.先进PID控制[M].电子工业出版社,2004.
[8]张国良,曾 静,柯熙政,邓方林.模糊控制及其MATLAB应用[M].西安交通大学出版社,2002.
[9]刘述喜,王明渝.模糊控制在感应电动机直接转矩控制中的应用[J].重庆大学学报,2005,28(12):23-26.
[10]李 辉.利用模糊控制改善直接转矩低速性能的研究[J].电气传动自动化,2006,28(1):32-33.