高速公路主线最佳行驶速度综合算法*
2010-04-10陈大山李克平
陈大山 孙 剑 李克平
(同济大学道路与交通工程教育部重点实验室 上海 200092)
0 引 言
高速公路主线可变限速控制是提高高速公路主线行车安全和交通效率的重要措施,在各国得到广泛的应用.可变限速的速度值应该随着交通状况、天气状况和路面状况的变化而发生相应的变化.车辆行驶的速度分布越离散,交通事故的风险越大[1-2],提供可参考的最佳行驶速度,可以使得车速分布相对集中,影响最佳速度值的因素是多方面的,其计算方法也有所不同,传统的计算方法有2种:(1)统计法,是依据统计数据确定最佳速度值,所以实时性较差;(2)数学模型法,是靠建立数学模型来计算,其模型的建立和各项参数的确定也比较困难.鉴于此,国内外许多学者采用了智能控制的方法来研究可变限速控制[3-4],在此基础上,文中给出的最佳速度综合算法,是针对高速公路主线实际情况,充分利用实时检测到的交通状况、环境状况等与速度密切相关的信息,先按照模糊规则进行模糊推理,再应用神经网络来记忆和学习模糊规则,同时使用遗传算法对神经网络的初始权值进行标定,避免其陷入局部极值,加快收敛速度.由此得到的最佳速度实时性好,准确性高,可为高速公路主线可变限速控制提供可靠的依据,产生良好的经济效应[5-6].
1 模糊设计
最佳速度模糊控制器的输入量有2个,即路段上的车辆数量和行车环境综合评价指标值;输出量只有一个,即高速公路路段的车辆最佳行驶速度,如图1所示.其中,行车环境综合评价指标值采用模糊逻辑得到一个具体的指标值,行车环境综合评价指标值的模糊控制器的设计如图2所示.
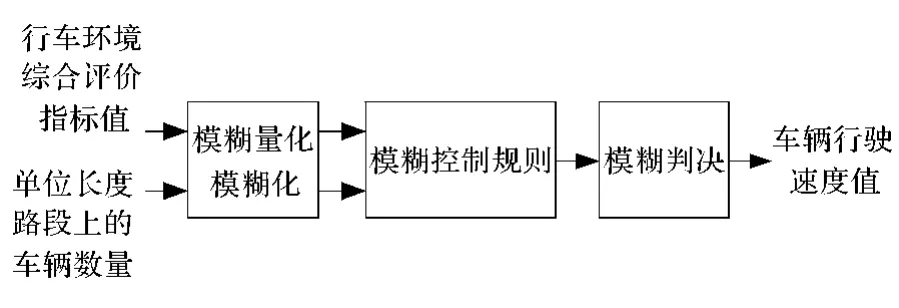
图1 最佳行驶速度模糊控制器

图2 行车环境综合评价指标值模糊控制器
行车环境综合评价指标值模糊控制器的输入量有两个,分别为天气指标值和路况指标值,因为天气和路况的确定存在一定的模糊性,对于天气的描述分为5个语言变量:w1(差),w2(较差),w3(一般),w4(较好),w5(好),其取值范围为 0~10,越大天气越好;对于路况的描述也分为5个语言变量:r1(差),r2(较差),r3(一般),r4(较好),r5(好),其取值范围为0~10,越大路况越好.同时,v(行车环境综合评价指标值)分为:v1(低),v2(较低),v3(一般),v4(较高),v5(高)5个语言变量值,值范围为0~10,越大越好.
模糊推理规则为

其中:i=1,2,3,4,5;j=1,2,3,4,5;k=1,2,…,25;共有25条规则.行车环境综合评价指标值的模糊规则表如表1所列.
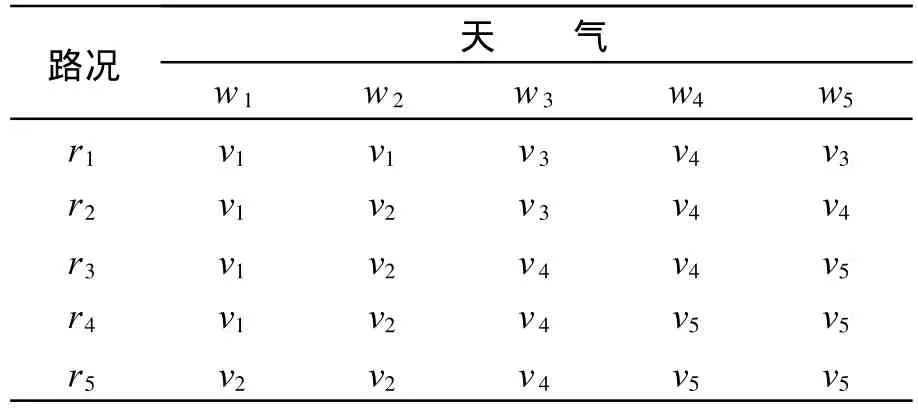
表1 指标值模糊规则表
对于车辆行驶速度模糊控制器,与行车环境综合评价指标值模糊控制器类似,在此不赘述.
行车环境综合评价指标控制器的输入语言变量有2个为天气和路况,天气、路况描述隶属度函数曲线如图3所示,图4为行车环境综合评价指标值的隶属度函数曲线,图5为该模糊推理系统的输出曲线,图6为最佳速度模糊推理系统输出曲线;隶属度函数全部采用正态型,清晰化计算采用最为常用的加权平均法.

图3 天气、路况描述隶属度函数曲线
2 遗传算法优化BP神经网络权值
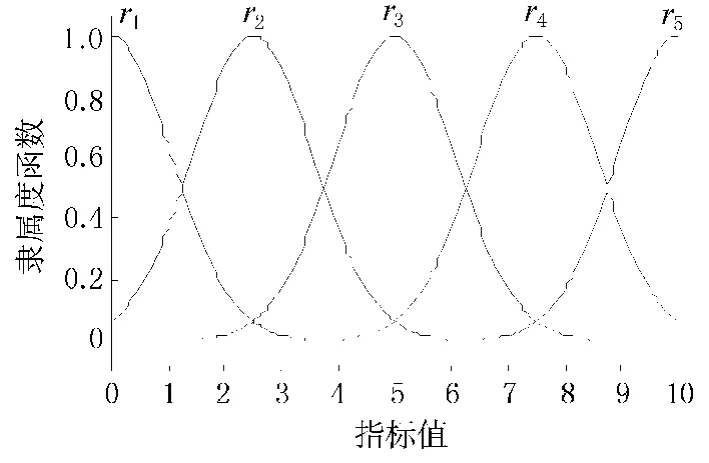
图4 指标值隶属度函数曲线
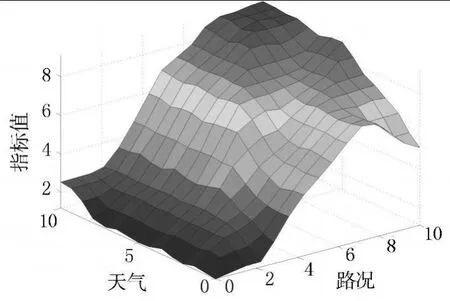
图5 指标值模糊推理系统输出曲面
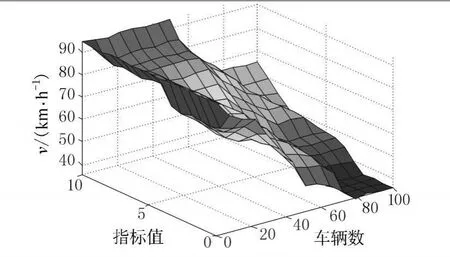
图6 速度模糊推理系统输出曲面
BP神经网络具有高度非线性和较强的泛化能力,但也存在收敛速度慢、迭代步数多、易于陷入局部极小和全局搜索能力差等缺点.采用遗传算法对BP神经网络的权值进行优化,首先是在解析空间找出较好的搜索空间,再用BP网络在相对较小的搜索空间内搜索最优解,这样就可以防止BP神经网络陷入局部极小,使得收敛的速度更加的快,迭代的步骤相对的减少(见图7).
BP神经网络限速控制模型中,输入变量有两个,一个是单位长度上车辆数量n,另一个是行车环境综合评价指标值v,输出变量为速度的限制值s,因此输入层神经元为2个,输出层神经元为1个.在确定了输入输出变量后,需要进行尺度变换,尺度变换常常将它们变换到[-1,1]或[0,1]的范围;采用 Matlab函数 premnmx(),tramnmx()和函数postmnmx()进行相应的数据变换处理,隐含层的神经元数目为10个.
遗传算法的主要参数选定为:种群n=100,遗传交叉率Pc=0.5和变异率Pm=0.06,适应度函数为
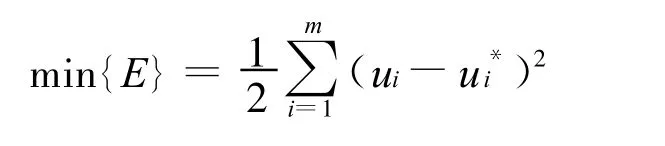
式中:μi为期望的控制输出值为控制的输出值.遗传算法训练BP神经网络权值的数据源来源于最佳速度模糊推理系统产生的300组数据.
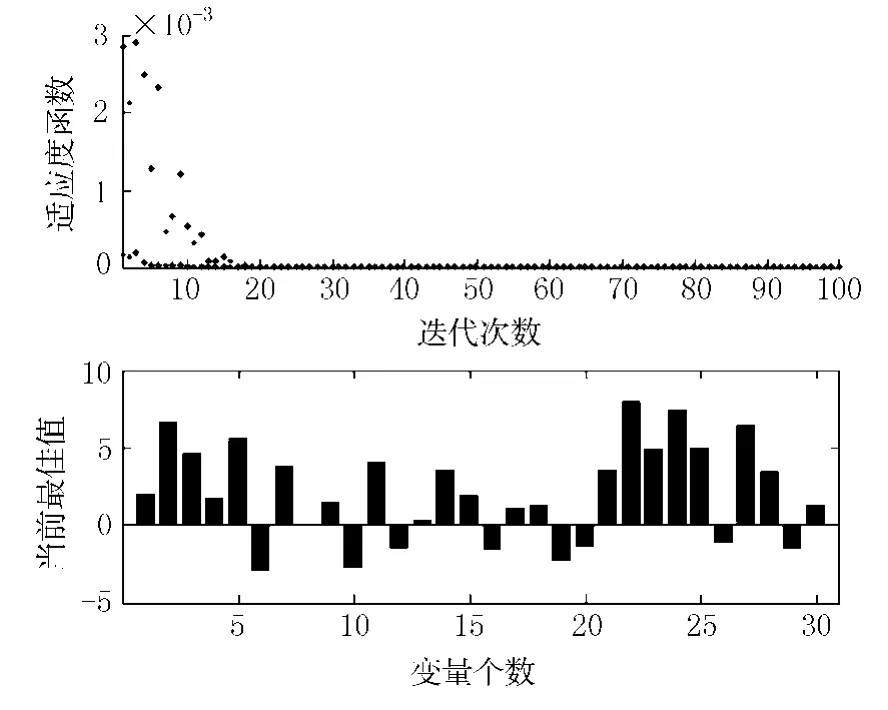
图7 遗传算法标定神经网络权值
3 仿 真
应用标定好初始权值的BP神经网络来学习和记忆最佳行驶速度模糊推理系统,400组数据来源于最佳行驶速度推理系统产生的新数据.图8和图9分别是未优化权值和优化权值的BP神经网络误差训练曲线.
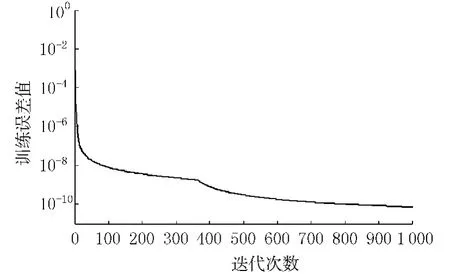
图8 未优化权值训练误差曲线

图9 优化权值后训练误差曲线
设仿真时选定时间点 21个,此路段最高限速为100 km/h,时间间隔为10 min,路段上的车辆数、天气、路况和仿真输出速度见表2所列.
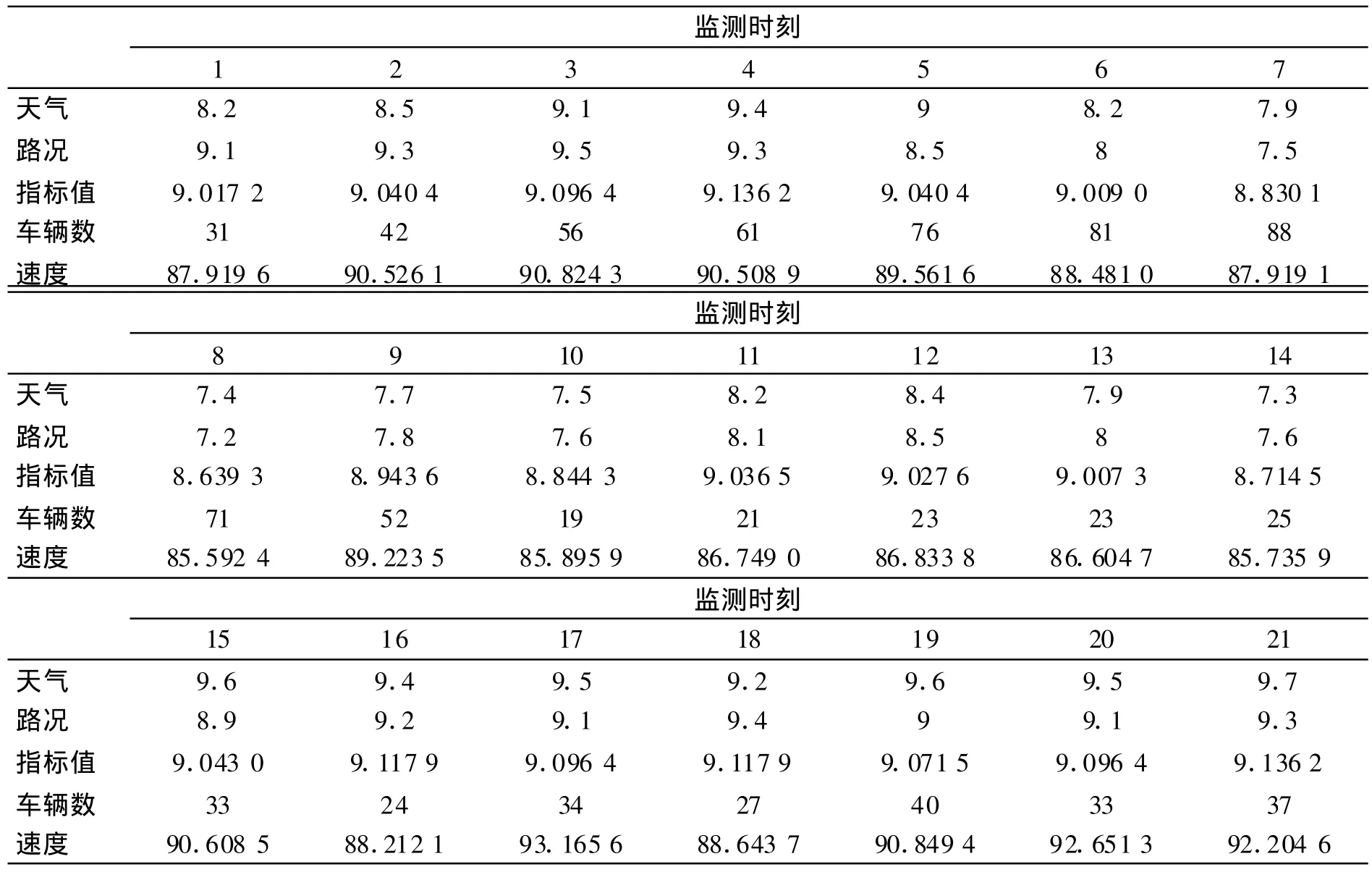
表2 最佳行驶速度仿真
由仿真结果可以看出,随着交通量、天气状况和路面状况的变化,可变限速的速度值发生了相应的变化.通过可变限速标志,把最佳行驶速度参考值提供给驾驶员,可使车速分布相对集中,减少驾驶员驾驶强度,从而降低交通事故的风险.
4 结束语
高速公路车辆的不合理的行驶速度是影响通行能力和诱发交通事故的重要原因,确定合理的最佳行驶速度具有重要的意义.本文阐述的综合算法,充分利用与速度密切相关的天气状况、道路状况与交通状况来确定最佳行驶速度,克服了传统算法的缺陷,为最佳行驶速度的确定提供了更为科学的方法,为高速公路可变限速控制提供了更合理的依据,可使高速公路通行能力增加、行程时间减少,并且有效的减少事故的发生和降低驾驶员的驾驶强度.如何把影响行驶速度的主观、客观因素进行更加详细的分析和建模,以及可变限速对安全的影响评价是本文下一步研究的方向.
[1]裴玉龙,程国柱.高速公路车速离散性与交通事故的关系及车速管理研究[J].中国公路学报,2004,17(1):74-78.
[2]Liu G.Provincial wide travel speed and traffic safety study in Saskatchewan[J].T ransportation Research Record 1595,1997:8-13.
[3]梁新荣,刘智勇,毛宗源.高速公路模糊神经网络限速控制与仿真研究[J]公路交通科技,2005,22(11):123-125.
[4]李宝家,黄小原.高速公路交通的变速限模糊控制[J].控制工程,2002,9(3):45-47.
[5]Krause B.Intelligent highway by fuzzy logic:congestion detection and traffic control on multi-lane roads with variable road signs[C]//Proceedings of the 5th IEEE International Conference on Fuzzy Systems,1996:1832-1837.
[6]隽志才,姚宏伟,朱泰英,等.高速公路可变限速系统的社会经济影响评价[J].公路交通科技,2004,21(5):104-108.