基于连续测角的被动测距技术研究
2010-03-26申波朱斌龙波郭立新
申波,朱斌,龙波,郭立新
(西南技术物理研究所四川成都610041)
在侦察定位目标过程中,目标距离是影响系统安全和武器首发命中的重要因素,其准确度影响到能否准确避开敌方威胁源的攻击,并对敌方目标进行精确的打击,所以探测目标的距离便成为关键技术之一。
测距技术可分为主动和被动测距2种。前者是通过自身发射大功率信号探测目标,通过分析目标信息确定目标的距离,但是由于主动测距技术自身需要发射探测信号,在实战中不便于隐蔽自己,容易被敌方发现,而遭受干扰甚至毁灭性打击。其探测精度较高,但是探测距离却比较有限;而后者又称为无源定位技术,是通过探测目标自身的辐射信息、角度信息或其他信息,并对其分析来确定目标距离。该技术不需自身发射探测信号,从而能够很好地隐蔽自己,具备极强的生存能力和抗干扰能力,被动测距技术可省略成本较高的发射单元,具有较高的性价比。二者相比,被动测距技术具有更远的探测能力。
1 系统模型的建立
机载红外搜索跟踪系统在发现并跟踪上目标后,可以连续获得目标的角度数据。在没有目标任何位置信息的情况下,利用这些角度数据,通过建立合适的模型,选用合适的滤波算法,就可以有效地估计出目标的距离。在空间极坐标系中,载机跟踪运动目标时,目标的三维运动状态如图1所示。
图1 空间极坐标系三维运动示意图Fig.1 Schematic diagram of three-dimensional motion in the polar coordinates
描述目标三维运动的状态向量表示如下:

式中,θ和φ分别是目标的俯仰角和方位角,其导数分别为对应角速度,ω是方位角速度的分量,R是目标与观测平台间的相对距离,其导数为目标与观测平台间的相对速度。
这些状态向量满足以下方程组:式中,Amx,Amy,Amz为观测平台本身的加速度,可作为已知量处理[1]。
基于测角的被动测距方法的观测向量为方位角和俯仰角,即:

可得测量矩阵为

2 可观测性分析
对于非线性系统的可观测性,工程研究中常采用Lee和Dum等人提出的可观测性定理来分析。
定理对于非线性系统,

如果对于凸集s∈Rn上的所有x0,都有

是正定的,则系统在s上是完全可观测的。
上述定理是针对连续系统的,对于非线性的离散系统,与此可观测性定理等价的结论是:对于初始集合s中的n维矢量Xk0,记

如果存在正整数N使矩阵A(i,i+N-1)的秩满足:

则系统在s上是完全可观测的[2]。
在空间极坐标系下,设系统的状态变量为

由状态向量满足的状态方程式(2),可得
可得状态转移矩阵

由于状态向量是6×1维向量,而观测向量是2×1维向量,所以进行N=3次观测,得到3个观测矢量,可得

从而可以求出Γ矩阵,并得出其行列式为

如果rankA=6,则根据前面所述非线性系统的可观测性定理可知,此时系统是可观测的。由于矩阵A是6×6方阵,所以rankΓ的充要条件是det A≠0。
由式(14)可以看到观测平台加速度分量Amy和Amz如果同时为0,则detA=0,此时系统不可观测。所以可知要系统是可观测的,则观测平台加速度必定不能为0,即观测平台必须作机动,也就可以得出载机作机动是本系统模型可观测的必要条件。
3 滤波算法
在光电雷达获取目标的角度数据之后,需要选取合适的滤波算法来进行滤波估计,而得出目标相对载机的距离。基于本系统是非线性系统,故采用非线性滤波算法来进行滤波。常用的非线性滤波算法有:扩展卡尔曼滤波算法(EKF)[3-4]、修正协方差的扩展卡尔曼滤波算法(MVEKF)[5],修正增益的扩展卡尔曼滤波算法(MGEKF)[6]和不敏卡尔曼滤波算法(UKF)[7]。
对于非线性滤波问题,通常的处理方法是利用线性化技巧将非线性问题转化为一个近似的线性滤波问题,套用线性滤波理论得到求解原非线性滤波问题的次优滤波算法。扩展卡尔曼滤波算法(EKF)是用泰勒级数将非线性的状态方程进行一阶或二阶展开,对状态方程进行线性化。
修正协方差的扩展卡尔曼滤波(MVEKF),其基本思想是在EKF方法中采用更新的状态值X^(k+1/k+1)重新计算雅克比矩阵,并用此新的雅克比矩阵作为测量矩阵对协方差矩阵进行更新,从而得到更加准确的修正协方差矩阵。
修正增益的扩展卡尔曼滤波(MGEKF),其基本思想是在EKF方法中计算更新滤波协方差矩阵时,用一个修正增益函数矩阵g(Zk+1,X^(k+1)/k)来代替量测矩阵Hk+1(X^(k+1)/k)。这个修正增益函数矩阵g(Zk+1,X^(k+1)/k)严格满足以下关系式:

其优点在于用可以减小观测方程的线性化误差,提高滤波精度。
不敏卡尔曼滤波(UKF)是用于计算经过非线性变换的随机变量统计的一种新方法。它不需对非线性状态和测量模型进行线性化,而是对状态变量的后验概率密度函数(PDF)进行近似化,进行不敏变换(UT变换),表现为一系列选取好的采样点,这些采样点完全体现了高斯密度的真实均值和协方差。
4 仿真实验
为对基于连续测角的被动测距方法的可行性和适用性进行验证[8],分别用扩展卡尔曼滤波算法(EKF)、修正协方差的扩展卡尔曼滤波算法(MVEKF)、修正增益的扩展卡尔曼滤波算法(MGEKF)和不敏卡尔曼滤波算法(UKF)进行了仿真实验。仿真实验参数设置为:目标在相对载机初始距离为70 km处作匀速直线运动,速度230 m/s,载机在x方向上作匀速直线运动,速度250 m/s,在y方向上作S形机动。光电雷达扫描周期T=1 s,扫描次数N=200,初始距离取为100 km,距离的标准差为10 km,速度的标准差为100 m/s,测量噪声标准差取为σθ=σφ=2 mrad。采用蒙特卡洛方法对跟踪滤波器进行仿真,仿真次数为100次。
4.1 系统可观测性验证
上述讨论了载机机动是系统可观测的必要条件,仿真实验的验证结果如图2所示。

图2 系统可观测性验证Fig.2 Validating the observability of system
由图2可以发现这几种滤波算法仿真的结果均是完全偏离真实轨迹,无法完成测距,可见在载机不作机动的情况下,系统是不可观测的。
4.2 滤波算法比较
在相同的仿真条件下,选用EKF、MVEKF、MGEKF和UKF 4种滤波算法,对其滤波效果进行比较,仿真结果如图3所示。
图3 仿真实验滤波估计曲线图Fig.3 Graph diagram of the simulation
由图3可以看出,在载机作S形机动的情况下,几种滤波算法都很好的完成了收敛,并获得了距离的估计值。这几种滤波算法的最终估计精度都达到了5%以内,具有较高的精度。
MVEKF、MGEKF和UKF均在20 s左右就可以迅速完成收敛,EKF则在40 s左右进入收敛。这4种滤波算法中,MVEKF、MGEKF和UKF的滤波效果差别不大,均比EKF的滤波效果要好。
5 飞行实验
为了对此被动测距方法的可行性和适用性进行验证,组织了飞行实验。通过光电雷达记录的实验数据,对此方法的被动测距效果进行分析和评价。
飞行实验中,载机作S形机动,目标机作匀速直线运动,在空间直角坐标系下其运动状态如图4所示。

图4 载机与目标相对运动态势图Fig.4 Situation map of the relative motion between the plane and the target
用EKF、MVEKF、MGEKF和UKF 4种算法进行被动测距,滤波估计曲线如图5所示。
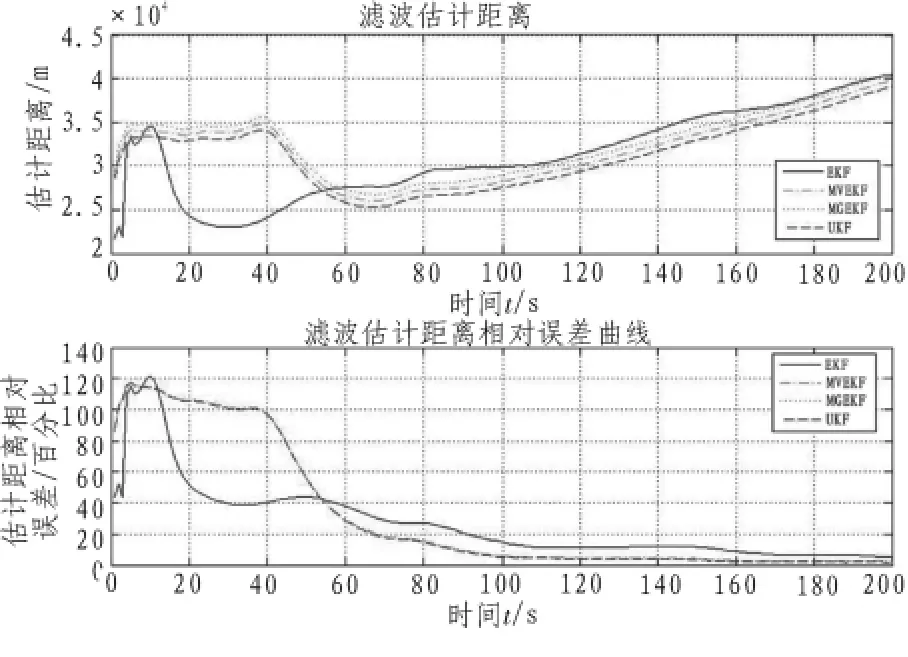
图5 飞行实验滤波估计曲线Fig.5 Graph of the flight experiment
通过飞行实验,基于连续测角的被动测距方法得到了目标最终的距离值和相对误差,列表如表1所示。

表1 实验结果比较Tab.1 Comparision of experiment results
由图5和表1可以看出,实验所测得的目标距离精度较高,滤波算法获得的精度值均达到了5%以内。实验表明,该测距方法能够应用于工程实践中,具有很高的实用价值和现实意义。
6 结论
本文基于连续测角的被动测距方法,在空间坐标系中构建了系统模型,对其可观测性进行了分析,得出载机机动是系统可观测的必要条件。然后通过仿真实验和飞行实验,对该测距方法的可行性与实用性进行了验证。
基于连续测角的被动测距技术通过观测目标的角度信息,建立合适的系统模型,选用合适的滤波算法,可以估测出目标的距离值。这种测距方法精度高,收敛快,效果好,是无源定位系统中一种重要的测距手段。
[1]赵勋杰,高稚允.光电被动测距技术[J].光学技术,2003,29,(6):652-656.
ZHAO Xun-jie,GAO Zhi-yun.Opto-electrical technique of passive detection[J].Optical Technology,2003,29(6):652-656.
[2]冯道旺,李宗华,周一宇等.一种单站无源定位方法及其可观测性分析[J].国防科技大学学报,2004,26(1):68-71.
FENG Dao-wang,LI Zong-hua,ZHOU Yi-yu,et al.A method of single-step passive location and the analysis of its observability[J].Journal of National University of Defense Technology,2004,26(1):68-71.
[3]何友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2006.
HE You,XIU Jian-juan,ZHANG Jing-wei,et al.Processing and analysis of radar data[M].Beijing Publishing House of Electronic Industry,2006.
[4]Guerci J R,Goetz R A.A method for improving extended Kalman filter performance for angle-only passive ranging[J].IEEE Transactions on Aerospace and Electronic System,1994,30(4):1090-1093.
[5]赵国伟,李勇,李滔.基于MVEKF算法的机载单站无源定位[J].西北工业大学学报,2007,25(1):113-116.
ZHAO Guo-wei,LI Yong,LI Tao.Algorithm for passive location based on MVEKF[J].Journal of Northwestern Polytechnical University,2007,25(1):113-116.
[6]浦甲伦,韦常柱,容思远.修正增益卡尔曼滤波算法在被动测距问题中的应用[J].宇航学报,2007,28(4):886-889.
PU Jia-lun,WEI Chang-zhu,RONG Si-yuan.The application of MGEKF in the passive detection[J].Journal of Astronautics,28(4):886-889.
[7]王淑一,程杨,杨涤,等.UKF方法及其在方位跟踪问题中的应用[J].飞行力学,2003,21(2):59-62.
WANG Shu-yi,CHEN Yang,YANG Di,et al.UKF and its application to bearings-only tracking problem[J].Flight Dynamics,2003,21(2):59-62.
[8]张艳桃,袁兆强.基于双端不同步采样的同杆双回线故障测距算法[J].陕西电力,2009,37(9):38-41.
ZHANG Yan-tao,YUAN Zhao-qiang.Two-terminal asynchronous data based fault location algorithm for double-circuit transmission lines on one pole[J].Shaanxi Electric Power,2009,37(9):38-41.
