柔性时间触发CAN总线信息动态调度研究
2010-03-19管长焦
管长焦
(煤炭科学研究总院沈阳研究院,辽宁 抚顺 113122)
1 引言
CAN(Controller Area Network)总线因其低成本、抗干扰等优点已广泛应用于工业自动化领域,CAN在处理周期性信号和随机性信号共存的通信方面,存在不确定性缺陷,且低优先级信息网络竞争能力差、响应时间延迟过长,易产生信息死锁现象[1]。针对这些问题,在嵌入式实时系统通信研究中,能同时处理时间触发和事件触发的协议,成为汽车控制系统网络技术发展的必然,TTCAN协议[2]为CAN增加了一个基于TDMA机制的会话层,为时间触发信息提供了基于系统矩阵的发送管理功能;TTCAN实现了两种不同触发机制驱动信息的同网共存通信,但在线运行时,其静态表不允许实时更新,限制了新信息的加入与根据应用需求进行信息调度功能,配置灵活性较差[3]。FTTCAN[3]采用双相结构,同时支持事件触发与时间触发机制,其时间触发调度集中在主节点,允许在线变换调度策略及新信息在网络运行时加入网络,同时采用CAN本身的仲裁机制来传递随机性信息。有效克服了TTCAN协议静态调度的缺点,可提供更完善的车载信息通讯功能。
FTTCAN异步相内随机性信息仍采用CAN协议的无破坏性仲裁机制进行调度传输同样不具有确定的传输时刻和周期,不能对其进行静态规划,为避免信息死锁,这里采用动态优先级提升算法实现对随机性信号的调度。
2 Flexible Time-Triggered CAN
FTTCAN采用双相基本周期结构对如图1所示的基本周期(EC)进行动态规划调度。基本周期由时间意义上的主节点发送触发信息TM启动,到下一次触发信息出现截止。基本周期内除了触发信息外的时间段被划分为异步相和同步相,图中AMi和SMi分别表示随机性信息和周期性信息。两相之间保留空闲时间段α,使得各类信息能够在严格各自相内进行传输。
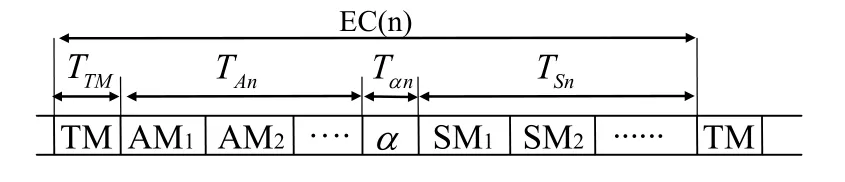
图1 FTTCAN基本周期结构
FTTCAN对时间触发信息的动态规划集中在主节点内,这样主节点可以根据需求变换调度策略而不会影响到其他节点。基本周期内所发送周期信息的具体实现由主节点发送的触发信息数据域内的数据编码完成[3],如图2所示。系统中除主节点外各节点仅保留与自身有关的生产/消费(P/C)表,各个节点同步接收到触发信息后读取其数据域内的数据进行解码并查询当地P/C表,若查到本基本周期内有本节点所需发送的信息,则等待同步相到来后立即申请信息发送,与此同时,在异步相内可以基于事件触发进行随机性信息通信。FTTCAN充分利用了传统CAN的仲裁机制,同步相和异步相内各信息之间竞争总线发生冲突时仍采用CAN本身的非破坏性仲裁机制解决。

图2 触发信息数据域编码原理
FTTCAN中负责调度同步相传输的触发信息数据域内容,由主节点的同步需求表(SRT)管理,同步需求表属性[3]如下:

式中,di为信息的数据长度,TC,i为最大传输时间,Phi为相对相位,Ti为发送周期,TD,i为截止期限,Pi为优先级。
3 优先级动态提升调度算法PP
3.1 PP调度中FTTCAN信息优先级规划
FTTCAN采用与CAN相同的帧格式,有两种分别为含有11位标识符的标准帧和含有29位标识符的扩展帧,本文采用标准帧格式。
PP算法的思想在于为每个非周期性信号引入延时优先级概念,各个随机信号的优先级由延时优先级和截止优先级共同决定[4]。截止期单调(DM)优先级与该信号截止期成正比,通过静态分配;等待优先级随着信号仲裁失败次数的增加而动态提升,定义提升步长为等待优先级的增量。
记信息m的优先级为PmR,各个信号的优先级由等待优先级Pm-W和截止期单调(DM)优先级Pm-DM共同决定,如图3所示,记步长为S。PP调度的核心是动态更新等待优先级,算法细节参见文献[4],算法流程如右图4所示。
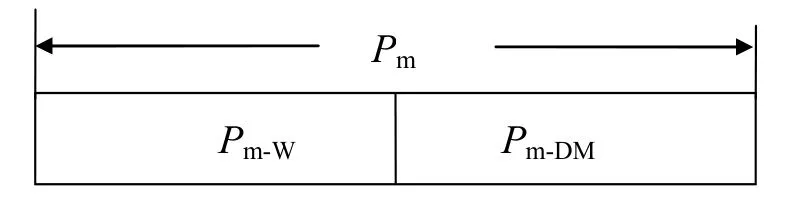
图3 PP调度中优先级规划
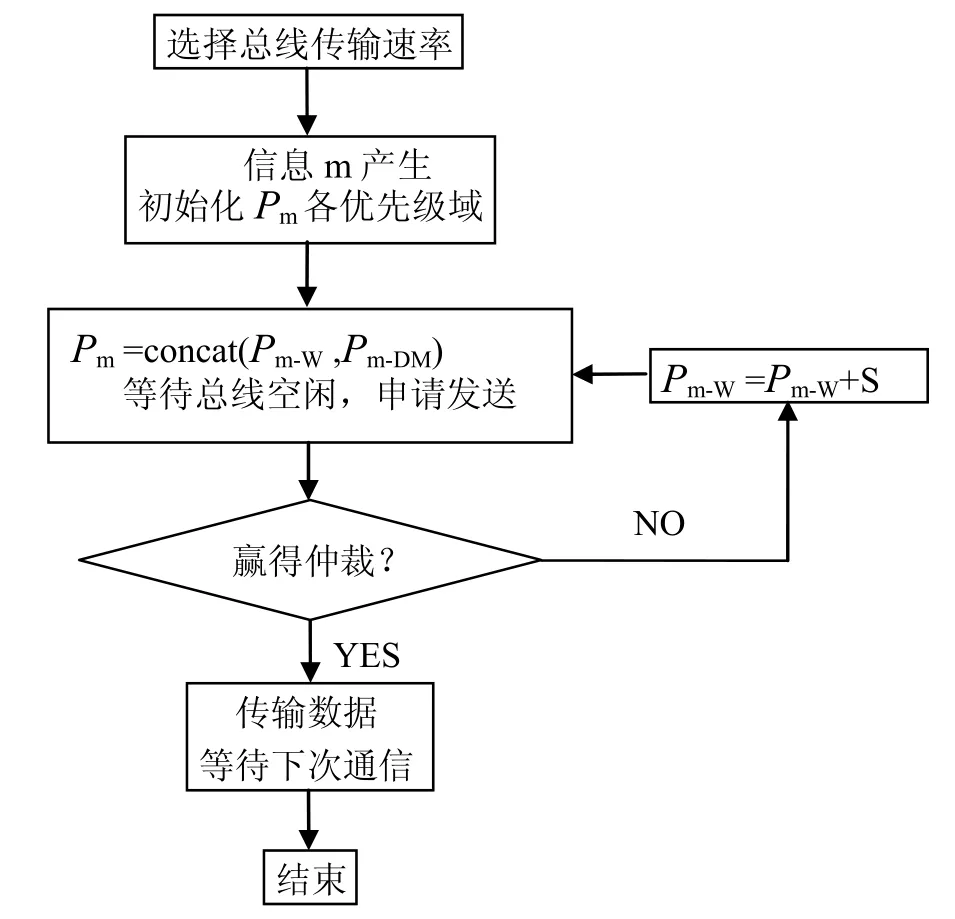
图4 PP调度算法流程
3.2 PP调度算法的可调度性分析
FTTCAN在两相内仍采用CAN自身的MAC仲裁机制,系统信息的通信实时性可沿用CAN的分析方法进行分析。
对于信息i的最坏响应时间TRi计算公式[5]为

其中,TBi为信息i被阻塞时间,TWi为等待较高优先级信息传输的时间,di为信息的数据长度,TCi为信息传输时间。
(1)同步相内周期性信息实时性分析
记周期性信息总集合为S,第n个基本周期内被规划周期性信号的子集合S( n)⊂S,则对于周期性信息i各时间参数的计算公式为[6-8]:

其中,di为信息的数据长度,τbit为总线传输一位数据占用时间。
(2)异步相内随机性信息的实时性分析
异步相内随机性信息的行为无法事先规划,在分析时需要考虑最坏情况[8],设随机性信息集合为A,对于随机性信息i,其时间参数计算如下[6-8]:

其中,Tα为FTTCAN两相之间最大时间间隔,TS同步相长度,TTM为触发信息长度。
4 实例分析
4.1 SAE电动汽车实时控制系统
引入SAE(Society of Automotive Engineers)电动汽车CAN信息基准[5],主要包括七个子系统:电池(Battery)、整车控制(V/C)、变频电机(I/M C)、驾驶员输入(Driver)、刹车(Brakes)和传输控制(Trans)。经同源周期信息数据合并[7]后系统内共有11个周期信息(S1-S11)和31个随机信息(A1-A31),其中,周期信息截止期为其周期,如表1所示。随机信息产生的最小时间间隔为50ms,信息带1字节数据,截止期为20ms。取总线传输速率为250 Kbit/s。
4.2 基于CAN的DM算法调度设计
传统电动汽车总线设计通常采用DM(截止期单调)算法[5],截止期越小的任务将获得越高的优先级,周期信息优先级规划结果如表1所示。
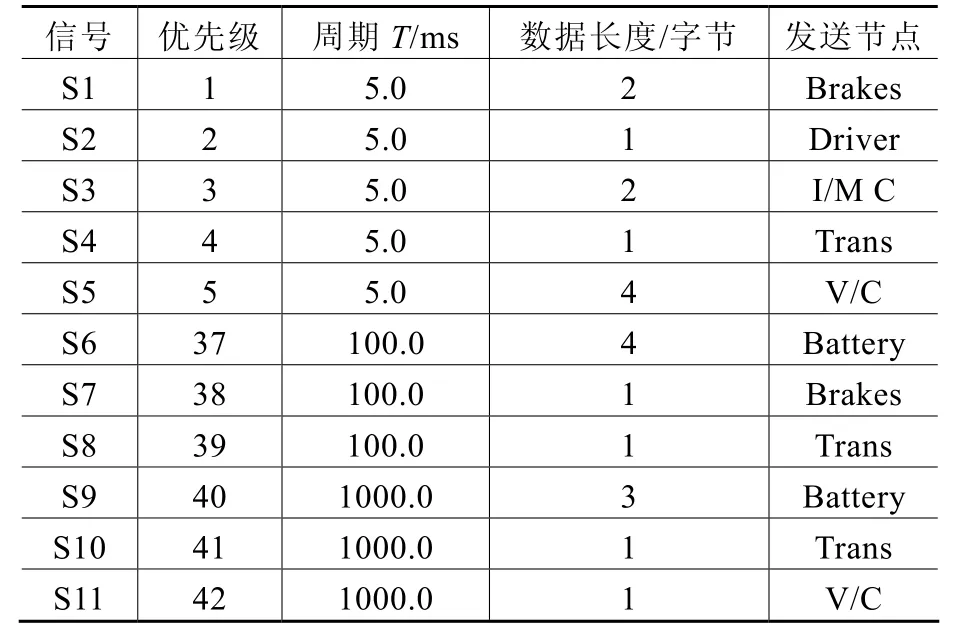
表1 电动汽车总线周期消息
4.3 基于FTTCAN的PP调度设计
将FTTCAN同步相长度规划为可以传输6个周期信息,则被分配在某一基本周期内传输的周期信息最多只能被5个信息所阻碍,基于CAN与FTTCAN总线下的周期信息最坏响应时间如图5所示。
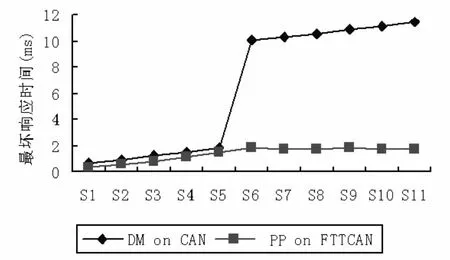
图5 周期信息基于CAN与FTTCAN的调度结果
由图5可知,FTTCAN中周期信息实时性明显增强,系统确定性增加。引入的优先级动态提升PP算法可以保证随机信息经过有限的仲裁可以获得总线使用权,提高了系统的确定性和实时性。
5 结论
本文提出将优先级动态提升算法引入柔性时间触发控制器局域网,FTTCAN兼顾系统灵活性与确定性,对电动汽车信息调度结果表明:FTTCAN有效的提高了周期信息实时性,所引入的动态提升算法可以有效的解决低优先级信息的死锁问题。
[1] 刘鲁源, 李芳, 吕伟杰. TTCAN协议的分析与展望[J]. 天津理工大学学报, 2005,(03): 15-19.
[2] G. Leen, D. Heffernan. TTCAN: a new time-triggered controller area network [J]. Microprocessors and Microsystems, 200226:77-94.
[3] Luís Almeida, Paulo Pedreiras, José Alberto G. The FTT-CAN Protocol: Why and How [J]. IEEE Transaction on Industrial Electronics, 200249(6):1189-1201.
[4] Cena G, Valenzano A. Delay Analysis of Priority Promotion Systems[J]. Computer Communication,2000, 23:1252-1262.
[5] K. Tindell, A. Burns, A.J. Wellings. Calculating controller area network (CAN) message response times[J]. Control Eng. Practice, 1995, 3(8): 1163-1169.
[6] Thomas Nolte, Hans Hansson, Christer Norstrǒm.Probabilistic Worst-Case Response-Time Analysis for the Controller Area Network [J]. Proceeding of the 9thIEEE Real-Time and Embedded Technology and Applications Symposium, 2003 IEEE.
[7] 吕伟杰, 刘鲁源, 王毅新. 基于CAN总线的TT-FPS调度算法研究及其性能分析[J].中国工程科学, 2006,8(5): 45-48.
[8] 曹万科, 张天侠, 闻邦椿等. 柔性时间触发控制器局域网络(CAN)控制系统动态规划应用与性能分析[J]. 机械工程学报, 2008, 44(5):142-146
