高超声速巡航飞行器在线自适应反馈控制设计
2010-03-16李惠峰李昭莹
李惠峰 李昭莹
(北京航空航天大学 宇航学院,北京 100191)
高超声速巡航飞行器在线自适应反馈控制设计
李惠峰 李昭莹
(北京航空航天大学 宇航学院,北京 100191)
由于飞行器模型的强非线性,各种建模不确定性以及飞行环境的复杂性,高超声速飞行器控制成为一个研究难点.针对某类具有参数不确定性的非线性系统,提出了一种反馈线性化与自适应估计相结合的方法,对非线性系统的输入输出动态应用反馈线性化处理以得到拟线性模型,并设计反馈控制律;对不确定参数采用自适应在线估计,利用 Lyapunov方法分析稳定性;针对选择不同输出的情况,对如何消除内动态进行了讨论.为了验证该方法的可行性,将其应用于某高超声速飞行器巡航段纵向非线性模型,对速度和高度通道进行跟踪控制仿真,由于飞行器和大气环境存在建模不确定性,利用自适应控制对不确定参数进行在线估计.仿真结果显示该方法能够快速收敛,并且具有良好的在线自适应能力.
高超声速飞行器;反馈线性化;自适应算法;稳定性;不确定性分析
高超声速飞行器通常采用推进气动耦合设计,虽然提高了推进效率,减小了气动阻力,但是稳定性也大大降低,而在高速飞行时,飞行环境和飞行状态变化复杂,所以飞行器对环境和模型的不确定性也十分敏感.在近些年的研究中,各种非线性控制理论诸如反馈线性化,自适应控制,神经网络,滑模控制,反步法等,被应用于高超声速飞行器的非线性控制,取得了较好的效果.文献[1]里,针对一系列不确定性(比如推力失效,执行机构饱和,甚至控制失效等),对高超声速巡航飞行器设计自适应控制器.文献[2]基于一个飞行航迹角动力学存在非最小相位特性,推进和气动之间存在强耦合的简化模型,提出了一种兼备自适应性和鲁棒性的设计方法.文献[3]里综合应用非线性动态逆和鲁棒控制,提出了 38个评估系统性能的指标,用对这些指标的偏离和系统发生不稳定的概率来表征系统的鲁棒性.文献[4]提出了基于特征模型的自适应控制律设计方法,给出了飞行器的误差特征模型,采用内-外环控制.文献[5]应用非线性动态逆控制设计高超声速飞行控制系统,并结合最优状态调节器以获得良好的控制性能.文献[6]应用轨迹线性化方法,对空天飞行器进行控制器设计,并结合单隐层神经网络提高了控制系统的自适应性.
从上述研究可看到,将几种控制方法结合起来,充分利用各自的优势,设计综合控制器,是一种解决高超声速飞行器飞行控制的有效途径.由于反馈线性化能够对高超声速飞行器非线性模型进行有效的解耦,便于控制设计,而在处理不确定性(尤其是参数不确定性)方面,自适应控制又具有很大的优势,因此将反馈线性化和自适应控制相结合,则除了解决非线性系统的控制问题,还能使设计的控制器具有良好的自适应性和鲁棒性.
基于以上分析,本文首先提出了针对一类MIMO(Multip le-Input-Multiple-Output)非线性系统的控制设计方法,结合了反馈线性化和自适应控制,用输入输出反馈使非线性系统线性化,采用自适应估计来处理参数的不确定性,并用 Lyapunov方法论证稳定性;然后将该方法应用到某通用高超声速飞行器纵向动力学模型,进行控制器设计,实现了对高度和速度的跟踪控制,并对模型中存在的不确定参数进行了自适应估计.
1 问题描述
首先考虑一类 MIMO非线性系统:

其中,x∈Rn为状态向量;y∈Rm为输出向量;u∈Rm为控制输入;系统的输入输出维数相同,h是从 Rn→R的平滑函数.对输出 y不断微分,直到产生一个不为 0的控制输入 u的分量系数,从而得到输入输出线性动态.

假设 gi(x)中存在不确定常值参数 θi,并可写为

整理得到 G(x):

2 控制器设计和稳定性分析
2.1 反馈控制设计
控制的目标是使输出跟踪给定的输入指令yd,设计反馈控制律如下(假定 G非奇异):


2.2 自适应控制器设计
i是对 ηi的在线估计.定义 Lyapunov函数如下:
其中,γi是正常系数,且有
对 Lyapunov函数微分得


通过整理得到

又因为
则对不确定参数进行估计的自适应律设计如下:


以 i=2,r1=2,r2=2为例,当反馈增益系数满足时,
3 模型仿真
飞行器模型采用文献[3]的巡航纵向模型,巡航速度为 15Ma,巡航高度为33km,控制目标是跟踪速度和高度的阶跃指令.
3.1 动力学模型
纵向动力学方程和二阶发动机模型构成一个7阶非线性系统.

按标称巡航条件计算,气动模型和推力模型如下:

控制输入是升降舵偏转角和节流阀:u=[βcδe]T.
通过在平衡点线性化,可以求得开环系统的特征根,对于高超声速飞行器来说,采用上述的动力学方程模型,5个特征根将会包括一正一负的两个短周期模态,分别对应俯仰角和攻角,两个慢衰减的长周期模态,对应速度和航迹角,还有一个不稳定的高度模态.由于本文的气动模型中,升阻力系数不包含升降舵偏转角,没有位于右半平面的零点,不存在非最小相位.
如果不引入二阶发动机模型,单从动力学方程来看,系统的阶数为 5,由于选择的输出是速度和高度,相对阶为 7(3+4),因此存在内动态,在设计控制器的时候,还需要检验内动态是否能稳定,如果不能,则需要重新设计.而引入二阶发动机模型后,就能避免出现内动态.
如果选择输出为 V和 γ,此时的相对阶为6(3+3),为了构造一个 6阶动力学系统,消除内动态,需要进行如下假设:①将重力加速度视为常值;②忽略离心力的影响.
在上述假设下,式(15)和式(16)中关于 r的项被去除,由于 h不再作为状态量,式(17)也可省略,剩下的 4个动态方程和二阶发动机模型一起构成 6阶系统,从而满足了消除内动态的需求.必须指出,这种简化只是为了设计控制器方便,在仿真时,为了获得相对准确的结果,应采用未简化模型,以验证控制器的稳定性和鲁棒性.
3.2 控制器设计
经过反馈线性化后,可以将输出动态写为

其中
上述表达式的具体形式见文献[3].从 G的具体表达式可以计算,在本文所讨论的范围内,当γ≠±π/2时,G非奇异.设计反馈控制器如下:
其中,Vd,hd是输入指令;e1=V-Vd;e2=h-hd是跟踪误差.
3.3 在线自适应估计
由于增益矩阵中存在不确定参数,将其写成如下形式,把不确定参数部分提取出来:
其中,a和 b是包含不确定常值参数 cβ,ρ,S,ce,c-,m的组合项.这些参数是难以准确测量的常值.a和 b的自适应律可设计为

4 仿真结果
首先验证反馈控制律,在标称模型下(无参数不确定性)分别对高度和速度的阶跃指令进行跟踪.图 1是对 30m/s速度阶跃指令的跟踪响应曲线,速度迅速收敛到指令值,高度的变化非常小,相比巡航高度几乎可以忽略不计;图 2是对610m高度阶跃指令的跟踪响应曲线,同样高度的收敛速度很快,而速度几乎不变.控制变量也能够快速稳定.
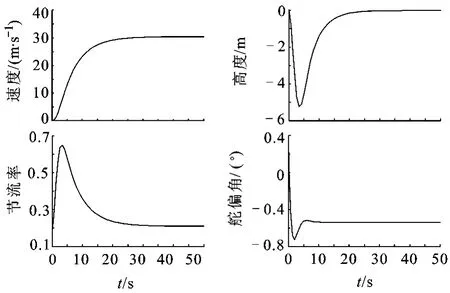
图1 速度阶跃指令响应(标称模型)
在验证自适应估计律时,a的额定值为8.289×106,b的额定值为 1.460×1013,通过计算发现当 m的不确定性为负,而 cβ,ρ,S,ce,c-的不确定性为正时,所有参数的组合项 a和 b的不确定性达到最大.取各参数的不确定性绝对值为2%,a和 b的真实值分别为 7.871×106和1.243×1013.在此条件下进行仿真,从图 3和图 4可以看到,自适应律使参数很快收敛到真实值,并且有效地降低了控制力(控制量节流阀变小),即为了实现同样的跟踪机动,引入自适应在线估计后能够降低发动机的能量消耗.

图4 高度阶跃指令响应(参数不确定)
5 结 论
本文给出了一种结合反馈线性化和自适应估计来设计控制器的方法,实现了对阶跃响应的跟踪控制.在分析飞行器特性的基础上,对利用反馈线性化解耦输入输出非线性动态进行了讨论,给出了在选择不同输出时消除内动态的处理方法.对于参数不确定性,采用自适应在线估计,并给出了闭环系统的稳定条件.仿真结果显示,在对参数引入一定范围的不确定性下,控制系统仍能保证较好地完成控制任务,体现了较强的鲁棒性.本文提出的控制策略设计思路清晰,能够解决 MIMO非线性系统的控制跟踪问题,并具有一定工程实用价值.
References)
[1]Gibson TE,Annaswamy A M.Adaptive control of hypersonic vehicles in the presence of thrust and actuator uncertainties[R].AIAA-2008-6961,2008
[2]Fiorentini L,Serrani A,Bolender M A,et al.Nonlinear robust/adaptive controller design for an air-breathing hypersonic vehicle model[R].AIAA-2007-6329,2007
[3]Wang Q,Stengel R F.Robust nonlinear control of a hypersonic aircraft[J].Journal of Guidance,Control and Dynamics,2000,23(4):577-585
[4]孟斌,吴宏鑫.高超声速飞行器基于特征模型的自适应控制[C]//程代展,吴敏.第 26届中国控制会议论文集.北京:北京航空航天大学出版社,2007:720-724 Meng Bin,Wu Hongxin.Adaptive control based on characteristic model for a hypersonic vehicle[C]//Chen Daizhan,Wu min.Proceeding of the 26th Chinese Control Conference.Beijing:Beijing University of Aeronautics and Astronautics,2007:720-724(in Chinese)
[5]刘燕斌,陆宇平.非线性动态逆控制在高超飞控系统中的应用[J].应用科学学报,2006,24(6):613-617 Liu Yanbin,Lu Yuping.Application of nonlinear dynam ic inversion control in flight control of hypersonic vehic le[J].Journal of Sciences,2006,24(6):613-617(in Chinese)
[6]朱亮,姜长生,陈海通,等.基于单隐层神经网络的空天飞行器直接自适应轨迹线性化控制[J].宇航学报,2006,27(3):338-344 Zhu Liang,Jiang Changsheng,Chen Haitong,et al.Directed adaptive trajectory linearization control of aerospace vehicle using SHL NN[J].Journal of Astronautics,2006,27(3):338-344(in Chinese)
[7]Slotine JJE,LiW P.Applied nonlinear control[M].Upper Saddle River,New Jersey:Prentice Hall,1991
[8]Xu H J,Mirmirani M,Ioannou P A.Robust neural adaptive control of a hypersonic aircraft[R].AIAA-2003-5641,2003
(编 辑 :张 嵘)
Adaptive feedback control design for hypersonic cruise flight vehicle
Li Huifeng Li Zhaoying
(School of Astronautics,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Because of strong nonlinear characteristics,modeling uncertainties and complicated flightenvironment,the control of hypersonic flight vehicle becomes a challenge.An approach which combines feedback linearization and adaptive control foramultiple-input-multiple-output(MIMO)nonlinearsystem with parameter uncertainty was proposed.Feedback linearization was used to obtain the linear input-output dynamics and a feedback controller was designed.The uncertain para meters were estimated online by an adaptive control law and the Lyapunov method was introduced to an alyse the close-loop system stability.For the conditions of choosing different outputs,a discussion was made on how to remove the inner dynamics to avoid unexpected unstable dynamics.A hypersonic cruise flight vehicle longitude model was used to testify the reliability of the proposed approach.In order to control altitude and velocity channel,a feedback controller with adaptive on line estimator was designed for the parameter uncertainties in vehicle model and atmosphere model.The simulation was operated to track the altitude and velocity step commands.Results show the controller has good tracking performance with rapid converge speed.
hypersonic vehicle;feedback linearization;adaptive algorithm;stability;uncertainty analysis
V 448.21
A
1001-5965(2010)11-1382-05
2010-01-19
李惠峰(1970-),女,陕西蒲城人,副教授,leehuifeng@buaa.edu.cn.
