多无限远目标模拟装置光轴共面测试技术研究
2010-03-16李明安志勇朱海滨肖作江马萄
李明,安志勇,朱海滨,肖作江,马萄
(1.长春理工大学 光电工程学院,长春 130022;2.吉林东光精密机械厂,长春 130103)
航空相机性能检测系统是将全景航空相机固定在整个检测装置的顶端不动,在其下方特定位置 40°、00°(机下点)、+40°放置三个无限远目标模拟装置(即三个大视场复消色平行光管),通过移动平行光管的分辨率板来模拟地面物体的移动,从而对相机动态分辨力进行检测。因此就必须要求这三个平行光管的光轴在相机摆扫的同一平面内。如图1所示,因为每个平行光管都是固定在金属平板上的,所以固定平行光管的三个金属平板也必须保证在同一平面内,通过检测三光管立板组成平面的平面度来为多无限远目标模拟装置三光轴共面做一个保证。目前,检测平面度多数采用自准直仪法、干涉法和光电检测法等,而由三块光管立板组成的非连续平面较大,共面性要求较高(共面度0.05mm),测量难度高,国内外尚无理想的办法。为适应平面度测量的需求,提出一种新方法,即一种基于激光准直五棱镜回转扫描和 CCD技术的非接触检测方法从而来测试三光管立板组成平面的平面度。
1 测量原理与方法
检测被测工件的空间平面度首先要解决的问题是建立一个较为理想的平面模型,使被测工件平面与理想平面具有很小的偏差。因此在测量光管三立板平面度时,找到这样一个理想平面就显得尤为重要,为使测量具有较高的参考价值,需保证理想平面具有比较高的精度。激光光束在性能上具有比其它光源更为优越的性能,在创建平面基准时往往采用激光光束。被准直之后的激光光束与轴系在空间上相互垂直,光束随着轴系转动一周,便可在空间创建一个平面基准作为参考平面,这一参考平面可以近似认为是无穷大的,在检测大型待测工件的平面度方面具有很高的应用价值[3]。
选择线阵 CCD的主要依据是测量范围和测量精度,本系统立板平面度测量精度要求较高,为±0.05mm,即选择1000像元以上的线阵CCD可以满足本测量系统的精度要求。本测试系统选择TCD1206UD型线阵 CCD,它的有效像元数为2160,像元尺寸为 0.014mm×0.014mm,像元中心距为0.014mm,足以满足本测量系统的要求。
图1显示了测量原理,波长为650nm的半导体激光器发出的激光,在准直系统以及缩束系统的共同作用下,形成平行度很高的激光光束,入射到五棱镜上并调整五棱镜的位置,使得出射光束同入射光束垂直,在回转轴的旋转带动下,从五棱镜发射出去的激光光束在空间便形成一个理想的参考平面,作为待测工件的平面基准,发射出去的激光通过CCD探测器接收。

图1 共面度测试原理示意图Fig.1 Schematic diagram of the co-planarity test
量方法如下:调整线阵 CCD的检测方向,保证这一方向与磁力表的底边平面相正交并将 CCD固定在表座上。在各个光管金属立板上分别设置测量点,并在这些测量点上固定磁力表,转动回转轴使由五棱镜发射出来的激光光束,以垂直于 CCD表面的方向入射到其上,激光束便形成一个光斑。磁力表的位移,会使 CCD探测器随被测表面的移动而发生起伏,导致激光光束在探测器表面上形成的光斑在像敏面上发生位置上的改变,改变的大小与被测工件表面和建立的理想的平面基准的高度差直接相关。最终把各测量点与基准平面在高度上的差值依次保存到单片机内并加以显示,将单片机连接到计算机上,建立偏差值的数据库,使用误差评定软件估计此数据库文件,结果将可视化并可以打印。
2 准直激光束的产生
激光器输出的高斯光束,由于其发散角往往都不是很小,有的甚至很大,所以在应用时,要对激光束进一步扩束,得到接近理想的平面波。高斯光束的远场发散角,与束腰半径成反比。准直就是减少高斯光束的远场发散角,进一步改善它的方向性,也就是扩大它的束腰半径,所以通常这一过程被称为扩束或准直。当已知束腰半径和束腰与薄透镜距离L时,根据薄透镜对高斯光束的变换公式可以推出像方高斯光束的远场发散角为


图2 扩束或准直用的倒置望远镜系统Fig.2 Alignment of the inverted telescope system

为了获得较高的驻波峰值强度,应缩小光束口径,增大光子密度,形成高深度的光学势阱,所以光束必须缩束。缩束系统一般使用望远镜系统,由几何光学知识可知,在严格的望远系统中,光束口径D和发散角 之间关系为:

由此可见二者呈反比关系,在一定的倍率条件下,二者有不可调和的矛盾。为了达到光路某一段口径的要求,设计了一套离焦望远系统,系统倍率M为l0×,离焦距离可根据实验情况具体调节。
3 精度分析与实验数据处理
3.1 精度分析
3.1.1 光源的稳定性
激光器的稳定性是是影响实验精度的一个重要因素。打开激光器半小时后,以20s为采样间隔,对同一个采样点进行20min的稳定性试验。分别得到两个方向上的光斑(电压)漂移图。实验结果表明,水平方向、垂直方向的最大偏差分别为0.72"、0.64",标准偏差为0.17"、0.11"。修正后尚有的残差为。
3.1.2 五角棱镜90°转角差
棱镜角度制造误差的大小,会严重地影响到光学仪器的光学性能和成像质量。五棱镜作为反射棱镜的一种,必能展开为一块平行玻璃。平行光束通过这样的透镜正如通过平行平板一样,不致产生额外的像差。如果棱镜展开后所成的平行玻璃板的入射平面与出射平面不平行,就会展开成一个楔形角,这一楔形角一方面可以引起光轴偏折,另一方面会引起色差。五棱镜的转向角受制备技术、制备工艺的限制,在加工过程中不可避免的会产生系统误差,这一误差是由制造本身引起的,可通过对最终结果进行数据上的修正,以消除系统误差给计算结果产生的影响,在本课题中使用的五棱镜的这一修正值或准确度其值约为0.2",修正后尚有的残差为
3.1.3 仪器引入的误差
测试系统中光电接收器采用TCD1206UD型线阵 CCD,它的有效像元数为 2160,像元尺寸为0.014mm×0.014mm,由于在室内进行检测,可以认为大气环境对检测本身不产生任何影响,在这种情况下由接收器所引起的误差可近视认为为
3.1.4 仪器轴系精度引起的误差
对系统而言,回转轴系引起的误差也是不能忽略的,由回转轴系引入的误差主要有径向跳动误差、角偏摆误差以及轴向跳动误差。因为径向跳动误差对系统的检测数据产生的影响非常小,可以认为不影响系统结果。在这种情况下,有3=2.1×106
3.1.5 测量环境误差
在不考虑环境温度对准直光束的作用以及忽略气流对准直光束的在数据上造成的误差的情况下,系统机械装置也会对准直光束产生影响,主要是在稳定性方面影响准直光束。通过在实验室内的实验测定,可以知道,在1小时内处于10m位置处的最大误差值大约为。
综上所述,得总误差为:
3.2 实验数据
三块平行光管立板组成的平面尺寸为2500mm×820mm,共面度要求为0.05mm,图3显示光管立板共面度测量点分布。表1给出测量数据及评定结果。平面度为0.039mm,满足要求。
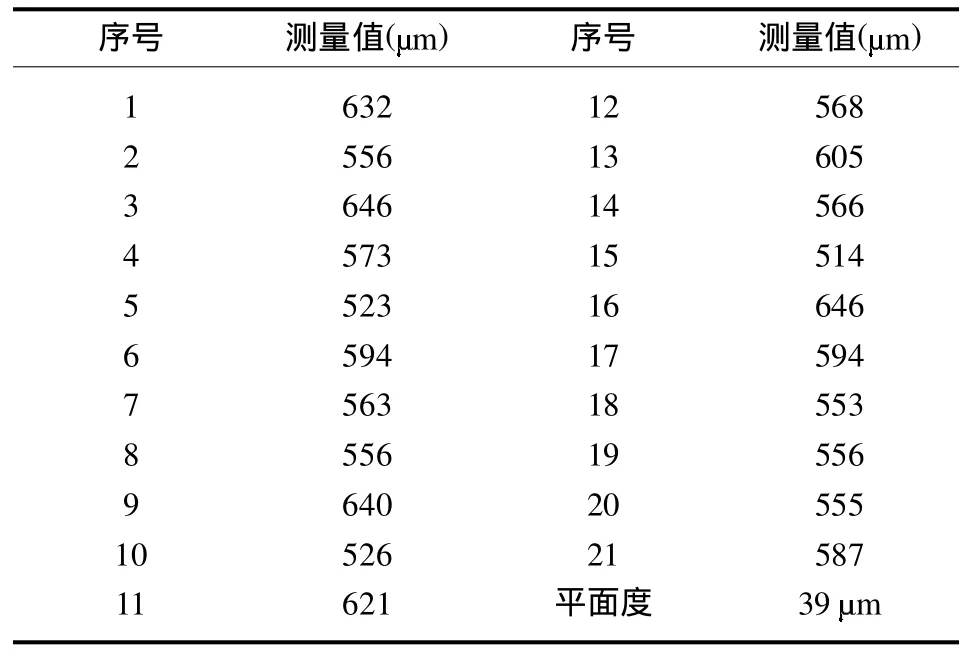
表1 测量数据与评定结果Tab.1 Measurement data and evaluation results

图3 多无限远目标模拟装置测试点分布图Fig.3 Device to test point distribution map
4 结论
本文采用激光准直五棱镜回转扫描法对多无限远目标模拟装置进行了共面检测,建立了数学模型,给出了平面度误差评定方法,在理论和实践中都取得了满意的结果,此方法只要改变评定软件可以完成对任意形状的大工件平面度误差的测量。
[1]李松.用五棱镜法检测光束准直性的原理分析[J].测绘信息与工程,1999(2):30-31.
[2]朱若谷.激光应用技术[M].北京:国防工业出版社,2006:52-57.
[3]甄恒洲.一种计算空间平面的平面度误差新方法[J].组合机床与自动化加工技术,2001,10:21-23.
[4]张东梅,尚春民.车载平台变形的激光自准直测量方法研究[J].长春理工大学学报,2006,29(3):16-19.
