Optimization of Submarine Hydrodynamic Coefficients Based on Immune Genetic Algorithm
2010-03-09HUKun胡坤XUYifan徐亦凡
HU Kun(胡坤),XU Yi-fan(徐亦凡)
(Navy Submarine Academy,Qingdao 266071 Shandong,China)
Introduction
The underwater movement of submarine,especially the underwater high speed movement,has a direct relationship with the security of submarine maneuvering,and that is why submarine designers always pay much attention to the evaluation of its maneuver performance and movement control performance.At present,the basic method of the evaluation is on the basis of traditional hydrodynamic model which expresses hydrodynamic force by hydrodynamic coefficient.To evaluate different maneuver movements,the numerical solutions should be computed in time domain.The dimensionless hydrodynamic coefficient—linearity or nonlinearity are usually deemed to be constants,and this method is generally used to predict submarine's maneuver performance and evaluate its movement control performance.[1]
Due to the limitations of the half-experiential hydrodynamic model whose dimensionless hydro-dynamic coefficient is constant,there exist uncertainty and inexactitude in the evaluation of maneuver ability and movement control ability.The main reasons are as follows[2]:1)along with the increase of submarine's speed,the landscape orientation stream is obvious when submarine moves in space and the nonlinearity and coupling hydrodynamic force remarkably affect the submarine’s horizontal response,while the model ignores or simplifies some nonlinearity and coupling items;2)the hydrodynamic coefficient and moment coefficient acting on submarine are gained mainly from restriction model test and theoretical calculation,the accuracy of which affects the precision of hydrodynamic coefficient;3)in the test of restriction model,the precision of metrical data affects the precision of hydrodynamic coefficient.
Therefore,the optimization of hydrodynamic coefficient has always been an important direction to study the submarine's maneuver ability.The genetic algorithm has been developing since it was put forward in 1960s,but the standard genetic algorithm can not solve some high dimension,nonlinearity and more-peak value problems[3].The immune algorithm which uses biology immune elements for reference can take full advantages of the best unit and the system information,and it can also retain colony diversity,combine the random search and certain change together.In this way,it can better eliminate the immature convergence and surge problems,so as to converge to the best global solution at the highest probability.This paper adopts an immune genetic algorithm based on the adaptive weight to optimize the hydrodynamic coefficient of a certain submarine,and evaluate the optimized effect by means of the maneuver index.
1 Submarine Space Movement Equation
The coordinate system,professional glossary and symbol rule expressed in the paper are all conformed to the rule system recommended by ITTC and SNAME.The submarine space movement equation is the standard rigid body movement equation[4]
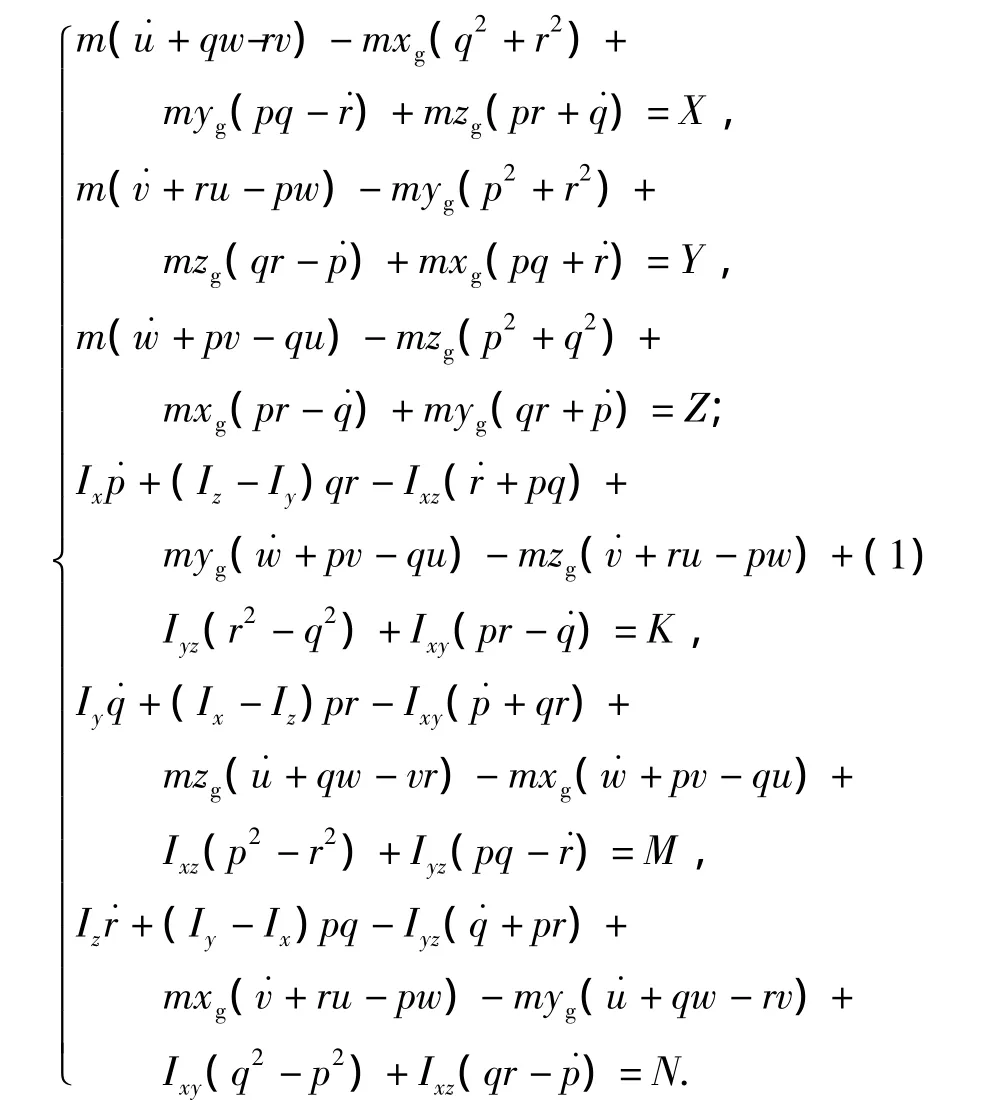
The right sides of equal mark in above equation are the outside force(moment)acting on submarine,which can be expressed as vector form as follows

In this form,the subscript symbol‘I’denotes the inertia force(moment);the symbol‘G’denotes noninertia hydro blow force(moment);the symbol‘B’denotes gravitation(moment);the symbol‘F’denotes buoyancy(moment);the symbol‘R’denotes controller's rudder force(moment);the symbol‘T’denotes screw propeller thrust(moment).
2 Submarine Hydrodynamic Forces
2.1 Inertia Hydrodynamic Forces
According to the potential flow theory,the tensor expression of inertia hydrodynamic forces proposed in Ref.[5]is adopted in this paper.The hydrodynamic forces(moment)acting on the submarine can be expressed as follows

where FIjis inertia hydrodynamic force and MIjis the moment-of-inertia acting on submarine;λji,λj+3,i,λli,λl+3,iare the additional mass tensor components.U1,U2,U3are the speed components,U4,U5,U6and Ω1,Ω2,Ω3are all the angular velocity components,that is

2.2 Non-inertia Hydrodynamic Forces
According to the current usual expression and considering the submarine's shape characters,the results of testing model,as well as referring to the hydrodynamic model in Ref.[3],the non-inertia hydrodynamic force is expressed as follows
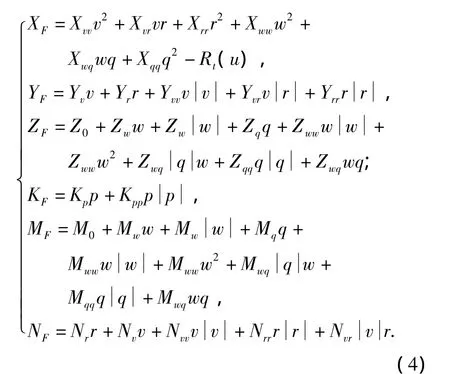
Combined the equation(3)with(4),and taking the submarine's weight,buoyancy,rudder force of controller into equation(1),the equation of submarine space maneuver ability can be obtained.
3 Optimization Achieved with Genetic Algorithm
3.1 Mathematical Description of Optimization Problem
It is known from the submarine space movement equation that the submarine's movement status is fixed when its speed,steering angel and hydrodynamic coefficient are determined.And on the contrary,when the speed,steering angel and movement are all known,a set of appropriate hydrodynamic coefficients can be found,which will make the emulational value best approach to the real value through the way of optimization.Without losing its generality,the side direction equation is taken to study the optimization problem in this paper.Table 1 lists the emulational value,real value and error of a certain submarine while it is gyrating at a speed of 14.5kn.(hydrodynamic coefficients are the ones before optimization).

Table 1 Emulational value,real value and error when submarine gyrates at the speed of 14.5 kn
It can be seen from Table 1 that the errors between the emulational value and real value are big at the speed of 14.5 kn,among which the biggest one is over 25%.When speed is fixed and rudder angles are identical but in opposite directions,the real value of submarine's gyration parameters(r,T,D,φ and v)are different,while the emulational values are equal.That means the influence of the single oar torsion of submarine's propeller can not be neglected.Therefore,it is necessary to optimize some side-direction hydrodynamic coefficients.Based on the points of Ref.[1],only those hydrodynamic coefficients of relatively high sensitivity should be optimized.For the side-direction equation,the optimized hydrodynamic coefficients should involve Y'0,Y'v,Y'rand Y'δr.The vector expression of decision-making variable is x(Y'0,Y'v,Y'r,Y'δr).
There are four target functions,including the function of gyration angel speed error,gyration cycle error,gyration diameter error and the horizontal obliquity error.The target functions are expressed as below

where i=1,2,3 are respectively correspond to right rudder 15°,left rudder 15°and right rudder 20°.ridenotes the real value of gyrating angel speed and rsiis its emulating value;Tidenotes the real value of gyrating cycle and Tsiis its emulating value;Didenotes the real value of gyrating diameter and Dsiis its emulating value;φidenotes the real value of horizontal obliquity and φsiis its emulating value.
For a certain kind of submarine,the value of horizontal hydrodynamic coefficients of Y'0,Y'v,Y'r,Y'δrare 0,-0.088 3.0.002 63 and -0.005 08.As a matter of experience,the errors of original hydrodynamic coefficients before optimization are not very big.So,the feasible region defined in this paper is within the range of the original hydrodynamic coefficients±10%,that is
3.2 DeterminationofWeightandOptimizing Objective Function
Adaptive weight method is one of the multi-objective genetic optimizing algorithms.It was put forward by GEN and CHENG[4]to solve the multi-objective maximization problem.To apply the algorithm to the hydrodynamic coefficients optimization,it is essential to transform the minimization problem to the maximization problem.The detail transform method is related to the design of fitness function.The fitness evaluation function adopted in this paper is

In this expression,denominator is expressed as fi(x)+0.1.The reason is to prevent calculation from overflow when the value of optimization objective function approaches to 0.
Because of the phenomenon of unable comparison and confliction existence among objective functions,for the problem of multi-objective optimization,it is difficult to find a global optimization solution to adapt each of objective functions.Usually a set of Pareto optimization solution can be found.In this paper,the adaptive weight method is used to solve the problem of hydrodynamic coefficient optimization.
If P(t)is the population of current generation,andare the maximal value and the least value of the k th object in current generation,respectively.Then

The adaptive weight of k th object is expressed as

For the fixed individual x,its adaptive weight and objective function can be expressed as

3.3 Realization of Hydrodynamic Coefficients Optimization Based on Immune Genetic Algorithm
The concept of immunity operator is developed from biology.The immunity operator usually includes bacteria pick-up,taking vaccination,diversity judgment or adjustment of each local gene,immune choice and so on.The steps of immune genetic algorithm discussed in some Ref.[6 - 8]were different,but their essence was to improve the conventional genetic algorithm with the immune principle.This paper synthesizes the merits of different method and puts forward an immune genetic algorithm.The steps of the algorithm are as follows.
1)Coding.The binary system is used to coding.The hydrodynamic coefficientto be optimized is mapped to a long integer with 20 digits.Then it is connected with several binary systems of 20 digits as individual coding.
2)Birth of initial population.Usually,initial capacity is 20~200.Here size of 50 is adopted.
3)Decoding and fitness calculation of parents'individual.Decode is the reverse process of step 1)to calculate each hydrodynamic coefficient.Then the fitness degree of individual can be calculated according to the way introduced in the last section.
4)Individual crossover and mutation.According to the basic genetic algorithm,for the choice of parents'individual,the roulette wheel selection and one-point crossover are adopted.For the operation of individual mutation,several digits are chosen to do overturning operation stochastically with a certain probability.
5)Immune memory.The best individual in every generation is chosen to get access to the memory library,and update those individuals whose fitness degrees are the ones of a sort in memory library.
6)Vaccination.The tactic of analogical vector moment probability is adopted to do the local optimization.A number of individual swatches are chosen to do decoding and optimization according to the information provided by optimized function.If the fitness degree of optimized individual is better than the former,new one is saved,otherwise the former is saved.
7)Collecting new member.To keep the diversity of individuals,some new individuals must be put in the new generation with a certain probability.This step can adjust the diversity of colony.
8)Conditions of termination.If fi(x)≤0.05 or the number of generations is over 100,the algorithm ends.
4 Results of Emulation
Based on the analysis above,the program is written using Visual C++to do simulated evolution calculation.A few of the hydro-dynamic coefficients before and after optimizations are listed in Table 2.
Those hydrodynamic coefficients before and after optimizations are respectively used to simulate the submarine's space motion simulation.The comparison between the results of emulation and real data under the conditions of submarine gyres in fixed depth and a speed of 14.5 kn is listed in Table 3.
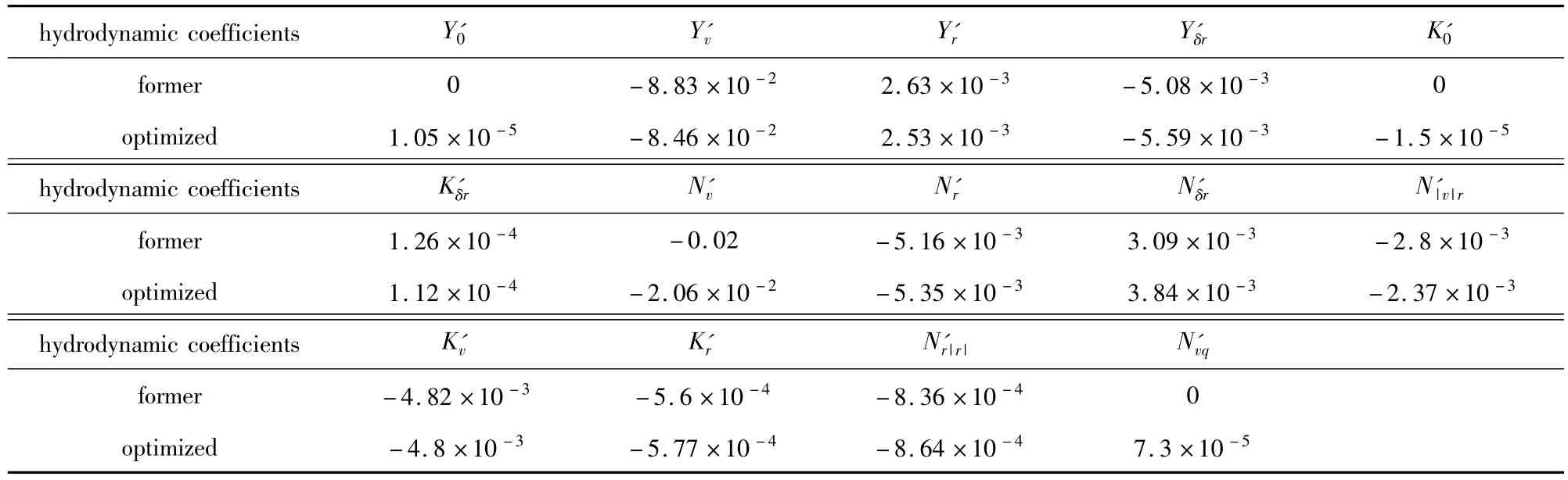
Table 2 Comparison of hydrodynamic coefficients before and after optimizations
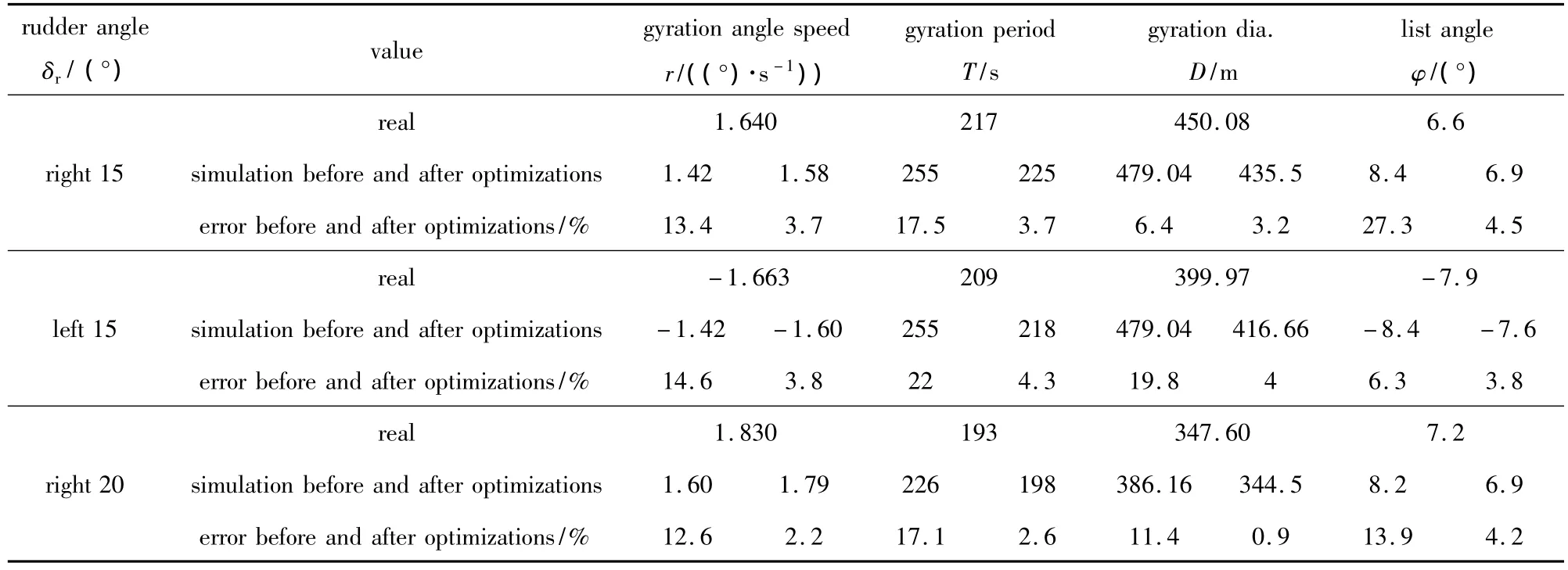
Table 3 Simulation value,real value and error
From the data in Table 3,it can be seen that the result after optimization is better in accord with the real data,the maximal errors of all coefficients are less than 5%.The emulational precision improves obviously in relative to the original hydrodynamic coefficients.
In addition,to evaluate the effects of submarine maneuvering ability with hydrodynamic coefficients before and after optimizations,three typical maneuvers are chosen to be the objects for investigation.They are:horizontal zigzag maneuver with 10°/10°overshoot maneuver,vertical trapezoid maneuver with bow submergence rudder 7°and zero trim by stern rudder and depth change 10 m,and horizontal turning circle maneuver carried out by rudder 25°[3].
Figure(1)~(4)show the comparison of the emulated results with real data before and after the hydrodynamic coefficients optimized for three typical maneuvers.From the figures,it can be seen that emulated curve with the condition of optimized hydrodynamic coefficients is closer to the real curve than that without optimized.This strongly illustrates that the optimized hydrodynamic coefficients can describe the sub-marine's motion accurately,and the optimization of hydrodynamic coefficients can also improve the emulation precision of the submarine's motion.

Fig.1 Comparison of zigzag maneuver's course angle
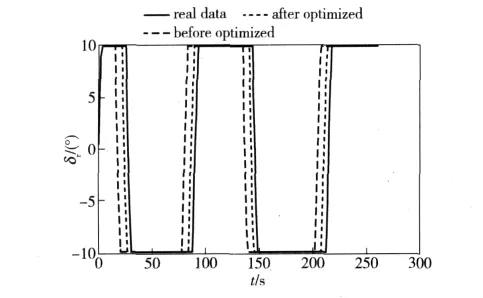
Fig.2 Comparison of zigzag maneuver's rudder angle
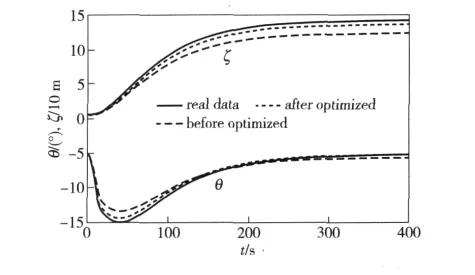
Fig.3 Comparison of vertical trapezoid maneuver's pitch and depth
5 Conclusions
This paper shows that optimizing the submarine's hydrodynamic coefficients with genetic algorithm is a feasible method.To optimize the hydrodynamic coefficients,a method is brought forward,that uses adaptive weight immune genetic algorithm.The topics of object function transformation,determination ofadaptive weight and the constraint problem of in-equation are exploited.Then three typical motions are chosen to do the optimization.The results show that optimizing the submarine hydrodynamic coefficients with genetic algorithm is a feasible method,and it can be further improved for engineering applications.

Fig.4 Comparison of turning circle maneuver's track
[1]Barr R A.A review and comparison of ship maneuvering methods[J].SNAME Transaction,1993,101:609 -635.
[2]XU Yi-fan,CHEN Ke,ZHANG Ben-wen.The simulation and test analysis of submarine motion equation[J].System Simulation Technology& Application,2004,6(9):484 -488.(in Chinese)
[3]SHI Sheng-da.Manoeuvre of submarine[M],Beijing:National Defense Industry Press,995:183-195,247 -249.(in Chinese)
[4]CHENG R,GEN M.An adaptive superplane approach for multiple objective optimization problems[R].Ashikaga,Japan:Ashikaga Institute of Technology,1998.
[5]Debabrata Sen.A study on sensitivity of maneuverability performance on the hydrodynamic coefficients for submerged bodies[J].Journal of Ship Research,2000,44(3):186-196.
[6]MENG Hong-yun,LIU San-yang.A genetic searching algorithm for a multi-maximum point based on immunity[J].Systems Engineering and Electronics,2003,25(4):479 -479.(in Chinese)
[7]LV Jun,FENG Bo-qin,LI Bo.Study on immune genetic algorithm and its application[J].Microelectronics &Computer,2005,22(6):221 -224.(in Chinese)
[8]DUAN Yu-bo,REN Jian-wei.A kind of new immune genetic algorithm and its application[J].Control and Decision,2005,10:1185 -1188.(in Chinese)
杂志排行

Defence Technology的其它文章
- Experimental Investigation on Finishing Technology by Magnetostrictive Ultrasonic Vibration of Magnetic Liquid
- Beam Pattern Synthesis Based on Hybrid Optimization Algorithm
- Robust Stability Criterion for Uncertain Neural Networks with Time Delays
- A New Chaotic Genetic Hybrid Algorithm and Its Applications in Mechanical Optimization Design
- Quantitative Analysis of Components in OC-CS Sprays by High Performance Liquid Chromatography with Double Wavelength UV Detection