声矢量阵列的求根 M USIC算法及其性能分析❋
2010-02-09张国军熊继军
王 鹏,张国军,熊继军
(1.中北大学电子测试技术国家重点实验室,山西太原 030051;
2.中北大学仪器科学与动态测试教育部重点实验室,山西太原 030051;
3.中北大学理学院,山西太原 030051)
0 引 言
与传统的声压水听器相比,矢量水听器能同时共点测量声场中的声压和三路相互正交的振速信息,所以其本身具有方向敏感性和大的测量信息量,基于矢量水听器阵列的 DOA估计性能较之于声压水听器阵也大为改善,可以实现空间降采样,增大基阵的孔径,国内外学者在此方面作了大量的研究[1,2].MUSIC子空间算法是高分辨估计的一种经典算法,突破了常规波束形成的瑞利限,提高 DOA估计性能,目前 MUSIC算法在矢量阵列中的应用也有一系列文献发表[3-7].
求根 MUSIC算法(Root-MUSIC)[8-10]是 MUSIC算法的多项式求根形式,是用求多项式根的方法来替代 MUSIC算法中的谱搜索,通过多项式求根来代替谱峰搜索,使得计算量降低,同时分辨率有所改善.
本文在传统声压阵列的求根 MUSIC算法的基础上,提出了适用于矢量阵列的求根 M USIC算法及其修正形式,通过选择合适的引导方位,可实现声源的 DOA估计,其估计性能要优于声压阵列的求根MUSIC算法.
不失一般性,下面以二维矢量水听器(同时测量声场中声压 p(t)和质点振速 {vx,vy(t)}的两个水平正交分量)来进行讨论.
1 二维矢量阵列信号模型
设 M个二维矢量水听器沿 x轴等间距布放组成均匀线阵,N个窄带平面波信号入射到矢量阵上,第 k个信号的平面到达角为θk(k=1,2,…,N),则阵列接收的信号矢量可以表示为

式中:Z(t)为阵列的 3M×1维快拍数据矢量;S(t)为空间信号的 N×1维矢量;N v(t)为 3M×1维高斯白噪声数据矢量,且噪声与信号独立;A(θ)为阵列流型矩阵,且


式中:R S是信号协方差矩阵;e2是高斯白噪声的能量;I是矢量阵的归一化噪声协方差矩阵.
实际计算中,考虑到实际接收数据是有限长的,采用数据协方差矩阵的最大似然估计来近似

式中:L为快拍数.
2 矢量阵列的 Root-MUSIC算法
定义多项式

式中:e i是数据协方差矩阵 R中小特征值对应的 3M-N个特征矢量,令 u=[1,1,1]T,且

则当 z=exp(j k)时,即多项式的根正好位于单位圆上时,Q(exp(j k))是一个空间频率为k的导向矢量.由特征结构类算法可知,Q(exp(j k m))=Q m就是信号的导向矢量,所以它与噪声子空间是正交的.因此,可将多项式定义修改为如式 (6)形式

式中:U N= [eN+1,eN+2,…,e3M]为 R特征分解中小特征值对应的噪声子空间.
只要求得式(6)的根即可获得有关信号源到达角的信息.同时因为多项式存在 z*项,使得求零过程变得复杂,因此定义多项式

多项式 F(z)的阶数为 2(M-1),其有 (M-1)对相互共轭的根,在这 (M-1)对根中有 N个根z1,… ,zN也正好分布在单位圆上,且

3 修正的 MRoot-MUSIC-V算法
式 (5)中的 u= [1,1,1]T,其作用相当于将二维矢量水听器的三路信号(声压 p(t)和质点振速vx(t),vy(t))进行迭加,没有充分利用到矢量水听器声压与振速联合处理的优势,所以引入引导方位h0,修正

此时,u的作用相当于将二维矢量水听器的三路信号进行加权迭加.
在引导方位h0的选择上,将第 i个矢量水听器的三路输出信号 pi(t),vix(t),viy(t)分别施以权重 1,cos h,sin h,并进行求和得到

式中:P(h)为阵列输出的空间谱,相当于一滤波器,依据所需信号和噪声方位的不同,实现信号与噪声的分离,当 h∈ [0,2π],通过搜索 P(h)的最大值,即可得到引导方位 h0.
综上,将式(12)替换式(5),通过求 F(z)的根,并利用式(11)得到估计方位,即得到修正的MRoot-MUSIC-V算法.
4 仿真实验
分别采用 8元声压均匀线阵和声矢量均匀线阵,阵元间距为中心频率波长一半,添加噪声均为高斯白噪声,利用传统声压阵列的 Root-MUSIC-P方法和本文提出的矢量阵列的 Root-MUSIC-V,MRoot-MUSIC-V方法进行声源 DOA的估计,仿真比较了在不同情况下各种方法性能随信噪比、快拍数等变化的影响.
4.1 单声源方位估计
采用单声源,入射方向分别取 60°和 120°,信噪比 SNR=0 dB,快拍数为 200,三种方法对声源方位估计结果分别见图1和图2,其中符号“*”表示所有根的分布,“o”表示各方位估计方位,“-”表示单位圆.从图1可以看到,三种方法都能准确地估计出声源的方位,但 Root-MUSIC-V方法较差,根离单位圆较远.从图2可以看到,当方位角为钝角时,Root-MUSIC-V方法估计性能较差,方位估计有偏离,而其它两种方法都非常准确.
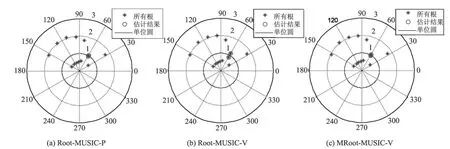
图1 三种方法声源方位估计结果(60°)Fig.1 The DOA estimation result of 3 algo rithm in single source(60°)
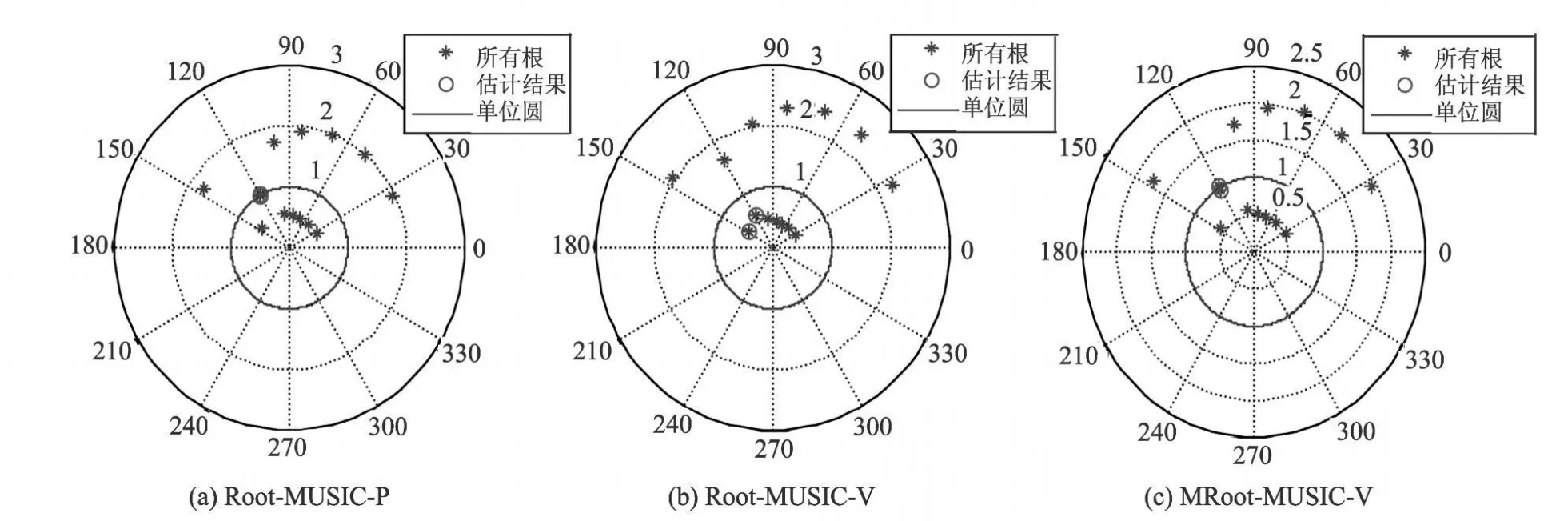
图2 三种方法声源方位估计结果(120°)Fig.2 The DOA estimation result of 3 algorithm in single source(120°)
4.2 双声源方位估计
采用双声源,入射方向分别取 60°和 70°,信噪比 SNR=10 dB,快拍数为 200,三种方法对声源方位估计结果分别见图3,其中符号“*”表示所有根的分布,“o”表示各方位估计方位,“-”表示单位圆.从图3可以看到,三种方法都能准确地估计出声源的方位,但 Root-MUSIC-V方法找到的根离单位圆较远.

图3 三种方法双声源方位估计图(60°,70°)Fig.3 The DOA estimation result of 3 algorithm in tw o source(60°,70°)

图4 三种方法统计性能随信噪比变化曲线Fig.4 The cu rve between the statistic performance of 3 algo rithm and SNR
4.3 方法统计性能与信噪比关系
采用单声源,入射方向取 10°,快拍数为 200,信噪比从 -10 dB到 20 dB变化,当各方法估计方位与真实方位误差在 1°范围内时认为成功,三种方法对声源方位估计成功概率和均方根误差随信噪比的变化曲线见图4(a),4(b),从图4中可以看到,矢量阵列的两种方法在低信噪比下具有高的成功概率和小的均方根误差,性能较为稳定,其中 M Root-MUSIC-V的性能最好,而传统声压阵列的 Root-MUSIC-P方法性能对信噪比要求较高.
4.4 方法统计性能与快拍数关系
采用单声源,入射方向取 10°,固定信噪比 SNR=10 dB,快拍数从 10到 300变化,当各方法估计方位与真实方位误差在 1°范围内时认为成功,三种方法对声源方位估计成功概率和均方根误差随快拍数的变化曲线见图5(a),5(b),从图5中可以看到,矢量阵列的两种方法在低快拍的情况下仍然有高的分辨概率和低的均方根误差,其中 MRoot-MUSIC-V的性能最好,而传统声压阵列的 Root-MUSIC-P方法性能对快拍数要求较高.
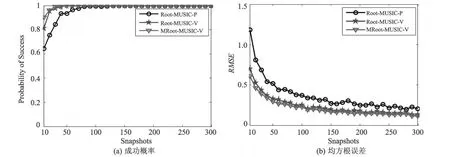
图5 三种方法统计性能随快拍数变化曲线Fig.5 The curve between the statistic performance of 3 algorithm and snapshots
5 结束语
本文提出了矢量阵列的求根 M USIC算法,并通过选择引导方位得到其修正算法,相对传统 Root-MUSIC算法具有运算量低的特点,同时,通过对声压和矢量传感器均匀线性阵列的仿真实验说明,MRoot-MUSIC算法的估计性能优于传统声压阵列的 Root-MUSIC算法,能充分发挥矢量阵列的优势.
[1] Nehorai A.Acoustic vector-sensorarray processing[J].IEEE Trans on Signal Processing,1994,42(9):2481-2491.
[2] 孙贵青,李启虎.声矢量传感器研究进展[J].声学学报,2004,29(6):481-490.
Sun Guiqing,Li Qihu.Progress of study on acoustic vector sensor[J].ACIA Acustica,2004,29(6):481-490.(in Chinese)
[3] W ong K T,Zoltowski M D.Self-initiating M USIC-based direc tion finding in underw ater acoustic particle velocityfield beamspace[J].IEEE J.of Oceanic Engineering,2000,25(2):659-672.
[4] 孙超.水下多传感器阵列信号处理 [M].西安:西北工业大学出版社,2007:230-261.
[5] 刘伟,王昌明,张自嘉.水声二维方向角估计降维算法及其仿真分析[J].系统仿真学报,2009,21(2):360-363.
Liu W ei,W ang Changm ing,Zhang Zijia.Reducing dimension algorithm o f underw ater acoustic 2-D ang leestimation and its simu lation analysis[J].Journalo f System Simulation,2009,21(2):360-363.(in Chinese)
[6] Jin He,Zhong Liu.Two-dimensional direction finding of acoustic sources by a vector sensor array using the p ropagatormethod[J].Signal Processing,2008(88):2492-2499.
[7] Zha Daifeng,Qiu Tianshuang.Underwater sources location in non-Gaussian impulsive noise environments[J].Digital Signal Processing,2006(16):149-163.
[8] Rao B D,Hari K V S.Performance analysis o f Root-M USIC[J].IEEE Trans.On ASSP,1989,37(12):1939-1949.
[9] Ren Q S,W illis A J.Fast Root-M USIC algorithm[J].IEEE Electronics Letters,1997,33(6):450-451.
[10] Carine ElKassi,Jose Pichera l,Chafic Mokbel.Advantages o f nonuniform arrays using root-M USIC[J].Signal Processing,2010(9):689-695.
