含间隙卫星天线双轴定位机构动力学仿真分析
2010-01-25白争锋王兴贵
赵 阳,白争锋,王兴贵
(哈尔滨工业大学航天学院,哈尔滨 150001)
0 引 言
卫星天线是卫星系统实现精确制导、精确定位的重要组成部件,而天线定位系统是卫星天线实现精确定位的一个关键组件[1-5]。双轴定位机构主要用来实现天线沿两个转动轴的转动,从而获得精确地空间位置,以便捕获地面指定区域的信号,同时双轴定位机构可以提供天线的位置信号,并对天线结构进行支撑。双轴定位机构在国外的通信卫星和数据中继卫星上已经有了较多的研究和应用,例如,Loral公司研制的用于INTELSAT(I-VII)卫星应用了该机构;日本ETS-VI为星上KSA卫星天线定位系统同样应用了该机构;Matra Marconi研制的DRRS卫星天线定位系统同样应用了该机构等等,我国在这方面尚处于起步阶段[2-3]。
星载双轴驱动天线的一个重要问题就是天象的指向精度问题,精度指标已经成为以空间驱动装置为系统核心的双轴驱动天线的关键指标,是系统设计与实现的一个难点[1-2]。由于装配、制造误差和磨损,运动副中的间隙是不可避免的,在机构运行期间,间隙不可避免地存在于各活动运动副处,运动副关节元素存在失去接触的现象,待再接触时会产生碰撞。间隙的存在使实际机构与理想机构的运动发生偏离,降低了机构运动精度,而且容易引起冲击动载荷,影响系统载荷传递,以及造成运动副的破坏和失效。随着精密机械工程和航天工程的发展,对精确预测系统动力学行为的要求越来越迫切。所以含间隙机构动力学已经成为国内外机械工程、宇航工程界需要迫切解决的关键问题之一[6-9]。解决这个问题的方法有两种[10]:一是通过提高制造精度消除间隙,但从成本角度出发这种方法是不现实的;二是正确分析间隙运动副副元素的相对运动过程,明确其影响机构动态特性的主要原因,进行合理的机构设计,尽可能地降低间隙的影响。第二种方法对机构设计具有很大的实用价值。
现有的文献关于卫星天线双轴定位机构的研究较少,并且研究的双轴定位机构都是在理想工况,不考虑运动副间隙,关于含运动副间隙的卫星天线双轴定位机构动力学特性研究尚未有文献。文献[1-2]分析了卫星天线双轴定位机构指向精度的影响因素,针对点波束天线指向计算问题进行了详细的分析;文献[3-5]通过虚拟样机技术对理想双轴定位机构进行了运动学和动力学分析,主要研究了虚拟样机建模方法以及分析了电机驱动力矩特性、静态和动态校核等问题。
本文以某卫星天线双轴定位机构为对象,采用非线性等效弹簧阻尼模型建立了间隙处的接触碰撞模型,同时采用Coulomb摩擦模型考虑运动副间隙处的摩擦作用,并将其嵌入到ADAMS多体系统动力学分析软件中,基于虚拟样机技术建立了含运动副间隙的卫星天线双轴定位机构动力学模型,首先在Pro/E软件平台中建立机构的三维实体模型,然后导入机械系统动力学分析软件ADAMS中,在ADAMS软件平台中对机构进行施加驱动、约束、和测量等,并把间隙模型嵌入到ADAMS中,基于ADAMS软件平台对含间隙卫星天线双轴定位机构进行动力学仿真研究。详细地研究了运动副间隙对双轴定位机构运动学和动力学特性的影响,以及双轴定位机构运行过程间隙碰撞力的变化规律。
1 卫星天线双轴定位机构工作原理
星载天线双轴定位机构是在空间环境条件下用来实现天线的两自由度运动与定位的专用空间机构,它可以实现天线对目标的实时跟踪、定位等功能,从而满足星地与星间通信与数据传输,各类雷达与观测器等对于两自由度运动的需求。
卫星天线的运动可以分解为沿横轴和纵轴的两个旋转运动。点波束天线双轴定位机构的工作原理是[3-4]:通过两个轴向相互垂直的控制电机,实现卫星天线沿两电机轴向转动,控制卫星天线的精确指向,实现精确定位。从定位精度和控制复杂程度两方面综合考虑,选用双转动副方式作为该点波束天线双轴定位机构的运动形式。该机构由纵向和横向两台驱动电机、纵向和横向减速机构、天线本体以及相应支架构成。
2 含运动副间隙天线双轴定位机构动力学建模
2.1 运动副铰间间隙的描述
运动副铰间间隙将引起相连两体的内碰撞,其内碰撞具有两个特征:首先,由于间隙的存在,系统成为拓扑结构可变的系统。运动副包含有间隙,体与体之间的连接产生了松动,这时,两体之间在间隙的方向上已经失去了铰间约束,进入到自由运动状态。但这个状态不是永远存在的,一旦两体的相对位移超过了间隙,就会进入到接触状态。这就是说,包含有间隙的系统具有两种拓扑状态:一种是不含任何约束,体作自由运动;另一种则具有单边约束的运动[8-9]。
间隙的另一个特点是它包含有碰撞和接触的过程:含间隙的变结构系统总是在自动运动和单边约束两种状态间相互切换,而这种状态间的切换几乎不可能是光滑、平稳的,一般来说,总是要包含着一定的碰撞过程。因此含间隙天线双轴定位机构动力学建模的关键是如何把间隙模型嵌入到动力学模型中,这需要考虑间隙铰接触碰撞过程的正确描述。
对含间隙天线定位机构转动副,考虑转动副铰接处轴承与轴同心,间隙大小用轴承与轴半径之差来描述,则间隙为:

其中RB为轴承(大圆)的半径;RJ为轴(小圆)的半径。如图1所示。
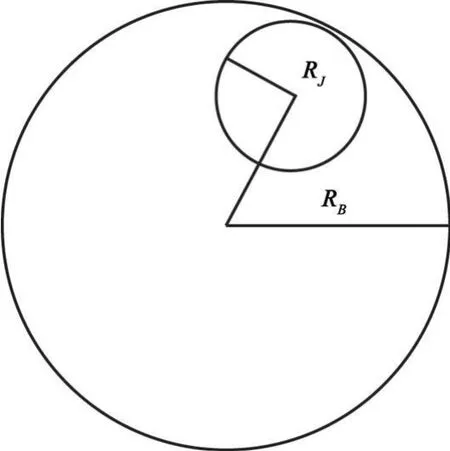
图1 含间隙转动副模型Fig.1 Sketch of revolute joints with clearance
2.2 运动副间隙接触碰撞模型
对间隙碰撞问题,归纳起来可以分为三种处理方法:动量平衡法、等效弹簧阻尼模型和连续接触模型。
等效弹簧阻尼模型假定两体的碰撞为点接触,两体之间的碰撞力通过接触点作在体上,将接触模型简化为一个弹簧阻尼系统,弹簧接触力根据一般Hertz定律确定,利用阻尼器模拟接触过程的能量损失。碰撞力的大小取决于等效弹簧的刚度特性和阻尼特性,等效弹簧阻尼模型虽然是一种近似分析的方法,但它使用起来简单方便,并且当等效刚度和等效阻尼的参数选择得合理的时候,能较好的模拟间隙的接触碰撞特性,计算的结果也比较准确。
采用非线性等效弹簧阻尼模型来建立轴与轴承间隙接触碰撞模型,其广义形式可表示为:

式中F n为接触点处法向接触力;K n为等效接触刚度;δ为接触点法向穿透深度;˙δ接触点法向相对速度;C(δ)为与δ有关的阻尼因子;m为指数,且m ≥1。
其中弹簧恢复力F k由Hertz接触理论确定:

为了克服线性阻尼模型的局限性,满足接触边界条件,采用非线性阻尼模型确定接触碰撞过程中的阻尼力Fd:

其中C(δ)为阻尼系数,它与恢复系数和接触刚度有关。取 C(δ)=0.75(1-e2)Kδ3/2/v0,e为恢复系数;v0为撞击点的初始相对速度。
间隙处的切向摩擦力采用Coulomb摩擦模型:

其中sgn(v)为符号函数,v为接触点的相对滑移速度。μd为滑动摩擦系数。
2.3 卫星天线双轴定位机构虚拟样机模型
本文基于虚拟样机技术建立了含间隙卫星天线双轴定位机构动力学仿真模型,首先在Pro/E软件平台中建立机构的三维实体模型,然后导入机械系统动力学分析软件ADAMS中,在ADAMS软件平台中对机构进行施加驱动、约束、和测量等,并把间隙模型嵌入到ADAMS中,基于ADAMS软件平台对含间隙卫星天线双轴定位机构进行动力学仿真研究。
为了清晰地反映间隙的影响,设在双轴定位机构的纵轴输入轴和输出轴连接转动副,横轴输入轴和输出轴连接转动副存在间隙,取间隙的大小为0.2 mm、间隙接触等效刚度值为1.7×107N/m、等效阻尼值为175 Ns/m,摩擦系数为0.1。
基于虚拟样机技术的天线双轴定位机构如图2所示。
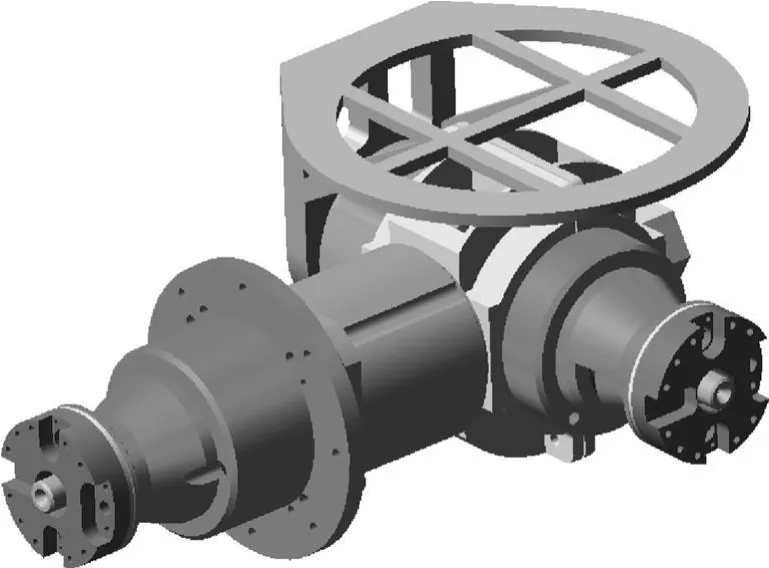
图2 卫星天线双轴定位机构虚拟样机模型Fig.2 Virtual prototype model of the two-axis-position mechanism for satellite antennas
3 仿真结果与分析
3.1 间隙对卫星天线双轴定位机构影响分析
基于ADAMS对理想工况与考虑间隙工况进行动力学仿真,图3分别为理想工况与考虑运动副间隙时双轴定位机构输出点的定位结果。

图3 动力学仿真结果Fig.3 Dynamics simulation results
由图3-a可知,由于间隙的存在使得天线双轴定位机构的运动轨迹与理想不含间隙时的运动轨迹出现偏差,因此间隙的存在将影响到天线双轴定位机构的运动轨迹和定位精度。由图3-b可知,理想不含间隙时,双轴定位机构的运动角速度曲线很平滑,而存在间隙时,双轴定位机构的运动角速度围绕不含间隙双轴定位机构的运动角速度曲线出现较大幅度的波动;由图3-c可知,存在间隙时,使得双轴定位机构的运动角加速度出现一系列大的抖动峰值,对双轴定位机构的运动稳定性有很大影响。分析其原因在于间隙的存在使得轴承与轴之间存在间隙碰撞力,从而使得定位机构运动角加速度出现突变。由上分析可知,间隙的存在对双轴定位机构的定位精度和运动稳定性有较大的影响。
3.2 间隙碰撞力变化规律
图4为理想工况与含间隙时,纵轴输出轴转动副碰撞力特性;图5为理想工况与含间隙时,横轴输出轴转动副碰撞力特性。
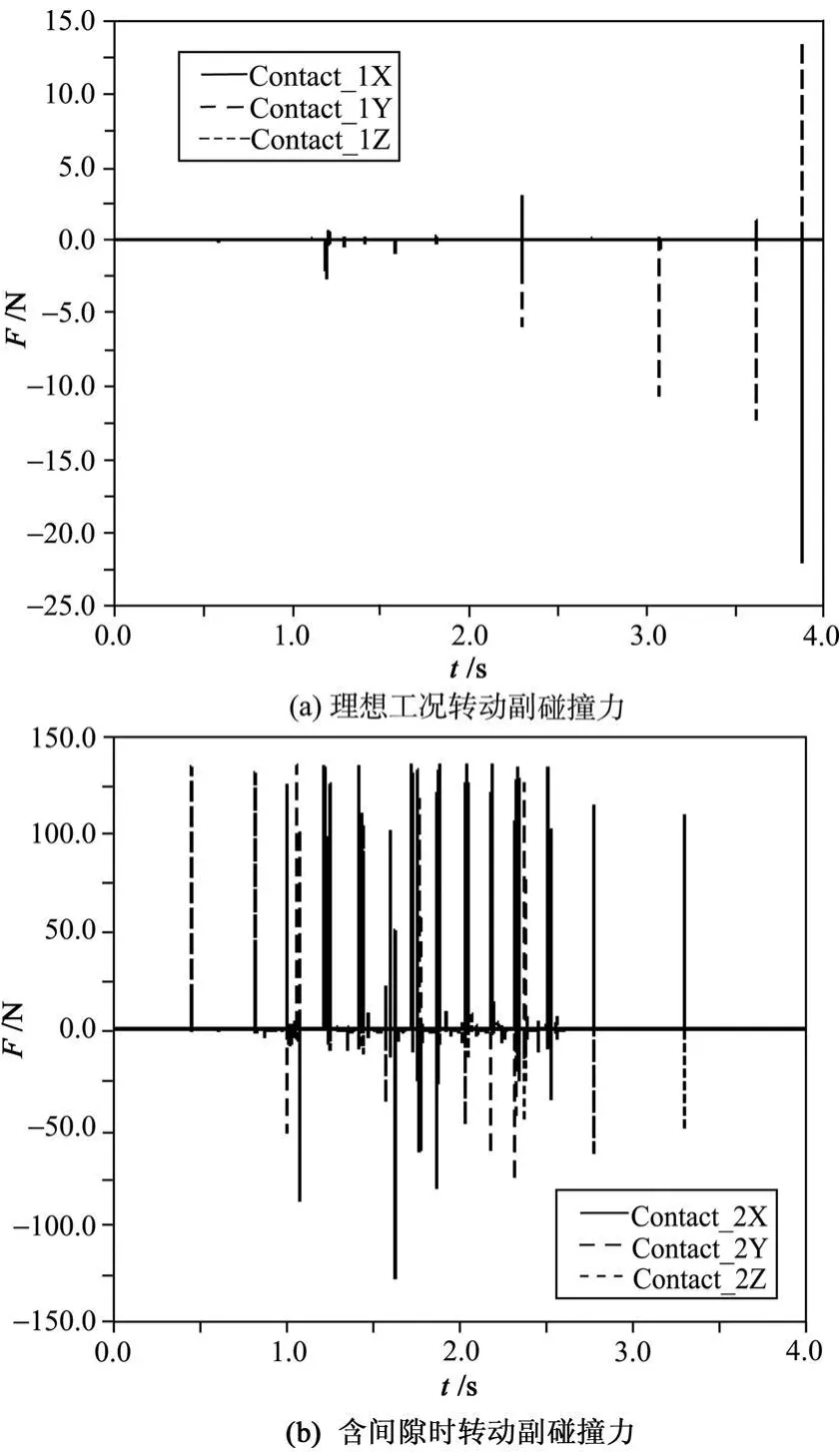
图4 纵轴输出轴转动副碰撞力Fig.4 Contact force of longitudinal axis joint
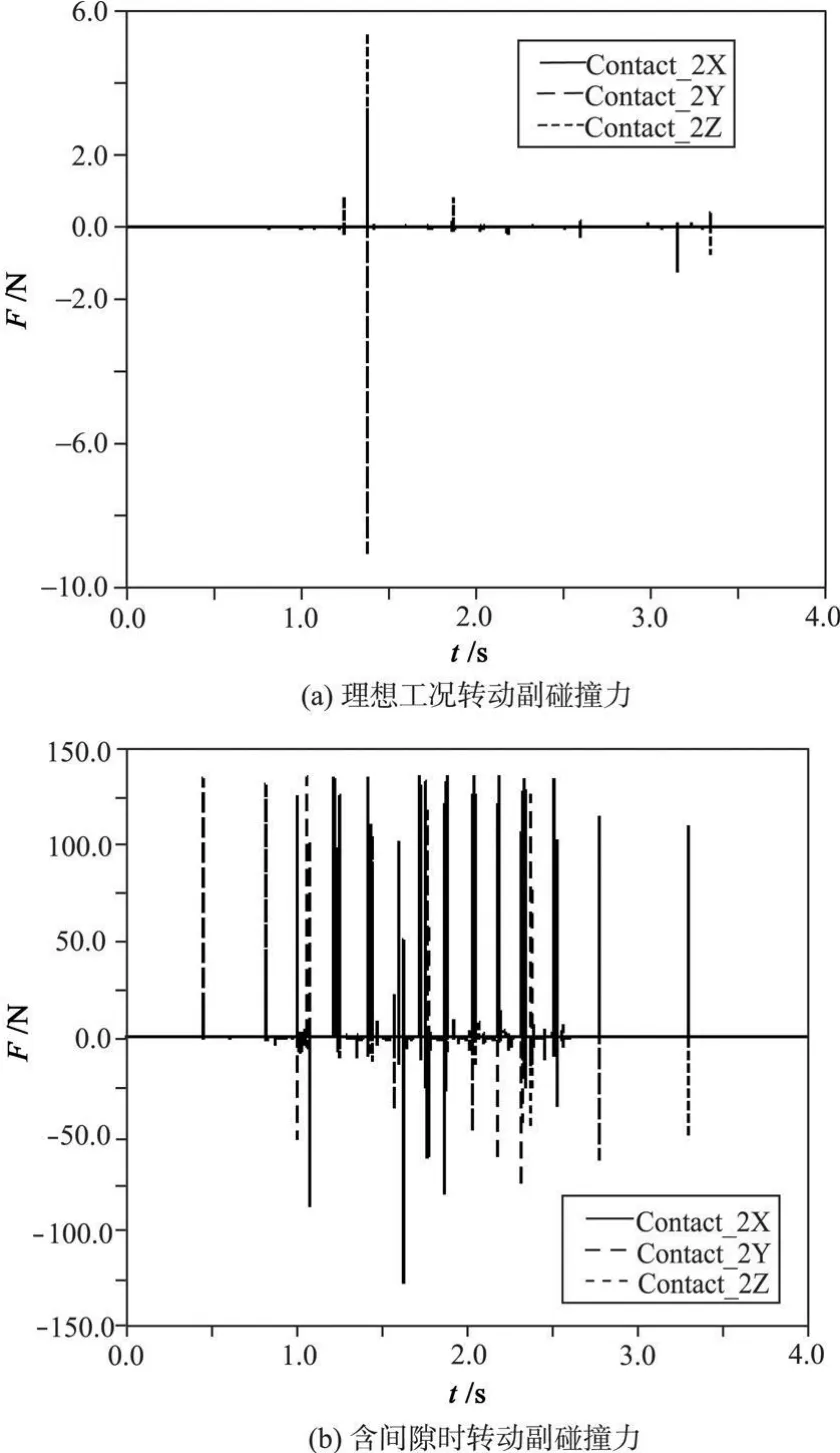
图5 横轴输出轴转动副碰撞力Fig.5 Contact force of lateral axis joint
由图4和图5可知,间隙的存在使得双轴定位机构轴承的碰撞力明显变大,增大了20倍左右,并且碰撞的频率增加,加剧了对双轴定位机构的破坏;并且由于碰撞力的增加,双轴定位机构运动角加速度明显的抖动,使得双轴定位机构的运动稳定性降低。由上分析可知,间隙的存在使得轴承碰撞力明显增大,对机构的可靠性和运动稳定性有严重的影响。
3.3 间隙大小对卫星天线双轴定位机构影响分析
进一步研究运动副不同间隙大小对卫星天线双轴定位机构动力学特性的影响,增大间隙大小,取间隙大小为0.5 mm进行动力学仿真分析,仿真结果如图6-7所示。
由图6-a可知,间隙增大时,天线双轴定位机构的运动轨迹与理想不含间隙时的运动轨迹的偏差也变大,说明间隙越大,天线双轴定位机构的运动轨迹偏差越大,定位精度越低。由图6-b可知,间隙增大时,双轴定位机构的运动角速度围绕不含间隙双轴定位机构的运动角速度曲线波动幅值变大,但是波动的频率降低。由图3-c可知,间隙增大时,双轴定位机构运动角加速度的抖动峰值增加,但是抖动的次数减少。由上分析可知,间隙越大,双轴定位机构的定位精度和运动稳定性越差。
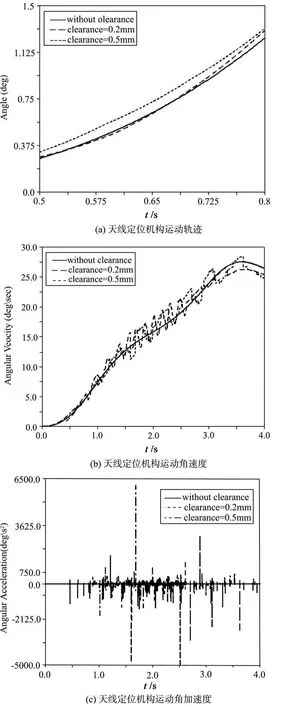
图6 不同间隙大小动力学仿真结果Fig.6 Dynamics simulation resultswith different clearance size
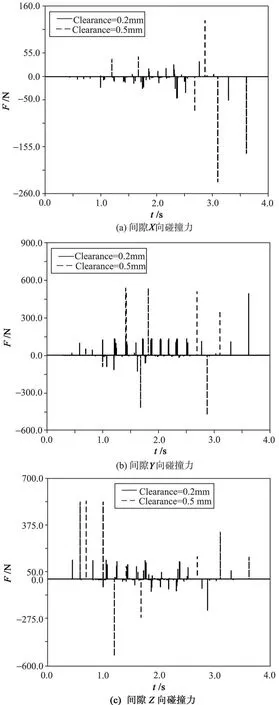
图7 不同间隙大小横轴输出轴碰撞力Fig.7 Contact force of lateral axis jointwith different clearance size
由图7可知,间隙增大时,双轴定位机构运动副的碰撞力也变大,对双轴定位机构的破坏性增大,但是碰撞的频率降低;并且由于碰撞力的增加,双轴定位机构运动角加速度抖动的幅值明显变大。分析其原因在于,由于运动副存在间隙,机构有平动的位移和速度,但间隙较大时,机构平动的时间较长,因此获得的平动速度也较大,因此碰撞力也较大。由上分析可知,间隙越大,轴承碰撞力越大,对机构的可靠性和运动稳定性的不利影响也越大。
4 结 论
为了研究运动副间隙在天线定位系统中的影响,以某卫星天线双轴定位机构为对象,采用非线性等效弹簧阻尼模型建立了间隙处的接触碰撞模型,同时采用Coulomb摩擦模型考虑运动副间隙处的摩擦作用,并将其嵌入到ADAMS多体系统动力学分析软件中,基于虚拟样机技术建立了含运动副间隙的卫星天线双轴定位机构动力学模型,并基于ADAMS进行了动力学仿真,结果表明:
(1)运动副间隙的存在使卫星天线双轴定位机构的运动轨迹出现明显的偏差,运动角速度和角加速度出现较大的抖动,表明间隙的存在对双轴定位机构的定位精度和运动稳定性有较大的影响。并且运动副间隙越大,天线双轴定位机构的运动轨迹偏差越大,定位精度越低;并且运动角速度和角加速度的抖动峰值增加,但是抖动的次数减少。表明运动副间隙越大,双轴定位机构的定位精度和运动稳定性越差。
(2)运动副间隙的存在使得运动副碰撞力显著增大,并且碰撞频率增加,对双轴定位机构的破坏性增加,使运动稳定性降低,表明间隙的存在使得轴承碰撞力明显增大,对机构的可靠性和运动稳定性有严重的影响。并且间隙越大,轴承碰撞力越大,对机构的可靠性和运动稳定性的不利影响也越大。
(3)仿真结果可以准确的预测运动副间隙对双轴定位机构的影响,为机构设计、精度分析和地面试验提供了参考和依据。由于运动副间隙对双轴定位机构的动态特性有很大的影响,因此关于运动副间隙对双轴定位机构不利影响的解决方法,是进一步需要深入研究的内容和方向。
[1] 田浩,赵阳,孙京,等.双轴定位点波束天线波束指向计算[J].宇航学报,2007,28(5):1215-1218.[TIAN Hao,ZHAO Yang,SUN Jing,et al.Beam pointing calculation of a dual-axis oriented antenna[J].Journal of Astronautics,2007,28(5):1215-1218.]
[2] 孙京,马兴瑞,于登云.星载天线双轴定位机构指向精度分析[J].宇航学报,2007,28(3):545-550.[SUN Jing,MA Xing-rui,YU Deng-yun.Pointing accuracy analyses of a satellitic two-axes antenna pointingmechanism[J].Journal of Astronautics,2007,28(3):545-550.]
[3] 廖英,李长江,冯向军,等.基于Pro/E的双轴定位机构虚拟样机的建模与校核[J].上海航天,2006(5):59-64.[LIAO Ying,LIChang-jiang,FENGXiang-jun,et al.Simulation and verification to the virtual prototypeof two-axis-position structurebased on Pro/E[J].Aerospace Shanghai,2006(5):59-64.]
[4] 李长江,廖英,廖超伟,等.卫星天线双轴定位系统虚拟样机动力学仿真[J],2005,(5):52-56.[LIChang-jiang,LIAO Ying,LIAO Chang-wei,et al.The dynamic simulation of the virtual prototype of the two-axes position mechanism for satellite antennas[J].Chinese Space Science and Technology,2005(5):52-56.]
[5] 鄢小清,杜云飞.卫星天线双轴定位机构建模与仿真[J].航空计算技术,2004,34(3):87-89.[YAN Xiao-qing,DU Yunfei.Modeling and simulatingontwo-axes position mechanismof satellite antennas[J].Aeronautical Computer Technique,2004,34(3):87-89.]
[6] Olivier A,Bauchau and Jesus Rodriguez.Modeling of joints with clearance in flexible multi-body system[J].International Journal of Solids and Structures,2002,39:41-63.
[7] Flores P,Ambrosio J,Claro H C P,et al.A study on dynamics of mechanical systems including joints with clearance and lubrication[J].Mechanism and Machine Theory,2006,41:247-261.
[8] GARCIA OEDEN J C.Analysis of clearance in multibody system[J].Multibody System Dynamics,2005,13:401-420.
[9] 白争锋,赵阳,田浩.含铰间间隙太阳帆板展开动力学仿真[J].哈尔滨工业大学学报,2009,41(3):11-14.[BAI Zhengfeng,ZHAO Yang,TIAN Hao.Dynamics simulation of deployment for solar panelswith hinge clearance[J].Journal of Harb in institute of Technology,2009,41(3):11-14.]
[10] 王国庆,刘宏昭.含间隙平面连杆机构动态特性研究[J].机械传动,2000,25(3):18-20.[WANG Guo-qing,LIUHong-zhao.Dynamic response of 4 R four-bar mechanism with a clearance joint[J].Mechanicale Chanical Transmission,2001,25(3):18-20.]
