国内外深海生物捕获现状综述
2010-01-07许肖梅
魏 翀 许肖梅
国内外深海生物捕获现状综述
魏 翀*许肖梅
厦门大学水声通信与海洋信息技术教育部重点实验室
随着人类对海洋的开发利用,深海资源成为了各国研究者极力探索的一块宝地。文章系统介绍了当今国内外针对深海生物的捕获技术,以及捕获技术的现状和收获,提出一些深海生物捕获待解决的难点,并对未来的发展进行了展望。
深海 捕获 采样 深海生物
1 引言
和传统海域不同,深海是一个非常特殊的生态环境,可以说是地球上最恶劣的环境之一。这里永久低温(火山口除外)、高压、黑暗。海水每加深10米,就会增加一个大气压。在1万多米的深海,压力高达1000多个大气压,也就是在每平方厘米的面积上的压力可达到1000公斤[1]。
近年来,随着各国海洋技术的发展,科学家纷纷把目光聚焦到深海这片广阔而又神秘的未知领域。其中对深海生物的探索主要包括了两方面:一是对生命起源的探索,如对发现深海热液喷口生物群落等[2];二是对深海生物样本进行采样及研究。本文将详细叙述近年来对深海生物捕获技术方面的现状、进展以及收获。
2 深海生物捕获技术
深海生物捕获,即对深海生物进行采样,把生物样品从深海捕获出水进行科学研究。从生物特性上来看,浮游生物行动力差,分布较多,所以相对容易捕获。目前国内外对浮游生物的捕获技术已经比较成熟,传统的捕获方法就是利用深海拖网、取样器或者抓斗获取生物样本,然后拖上岸来进行过滤分离[3]。而对于深海一些较大型生物(诸如深海底栖生物、游泳生物)的捕获相对较难,当今的捕获技术主要分为拖网技术以及深潜器技术,结合一些比较简单的诱捕技术。
2.1 深海拖网捕获技术
拖网捕获技术,是一种利用船舶航行的拖拽式采样方式。主要分为底拖网和水中拖网两种方式。
底拖网技术用于对深海底栖生物等小型生物进行采样捕获。它由拖曳缆绳和采样铁框架和网篮等构成,采样时用绞车把采样器沉放到海底,并靠船舶的航行沿着海底拖曳采样,收集样品。
水中拖网适用于捕获较大的深海生物,它是由拖拽览绳和设置了一定网格大小的渔网所组成,利用船只在海面上拖动,来回拖拽进行捕获。
2.1.1 拖网的缺陷
大量研究显示,底拖网技术对生态系统造成了灾难性伤害,珊瑚、海绵、鱼类和其它动物都将因此受到捕杀。而且众多海洋生物的栖息地——海山等水下生态系统也遭到了严重的破坏。这对海洋生态系统造成了无法弥补的损失。
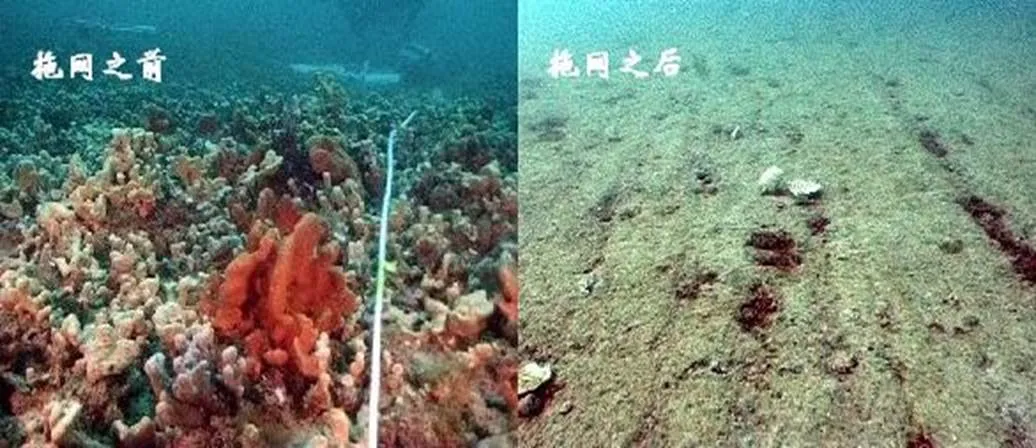
图1 拖网前后海床对比图
从图1中可见,拖网后海床上留下明显的底拖网滚轮划痕,所经之处都被夷为平地。此外,底拖网还会掀起海底沉积物,严重破坏海底生物的生存环境。
而从技术层次来看,拖网技术很难对生物进行有针对性的捕获,往往造成不分青红皂白的“滥杀无辜”,成功率低且浪费资源。
2.1.2 拖网的改进[4]
由于拖网存在着以上这些缺陷,尤其是对深海生态环境的破坏,使得研究者不得不思考如何改进技术,尽量减小拖网的破坏。改进的理论基础是使用遥控技术控制拖网上纲、下纲以及海底之间的距离(D1、D2),使其保持在一个合适的距离,尽可能的减小拖网与海底之间的剪切力。
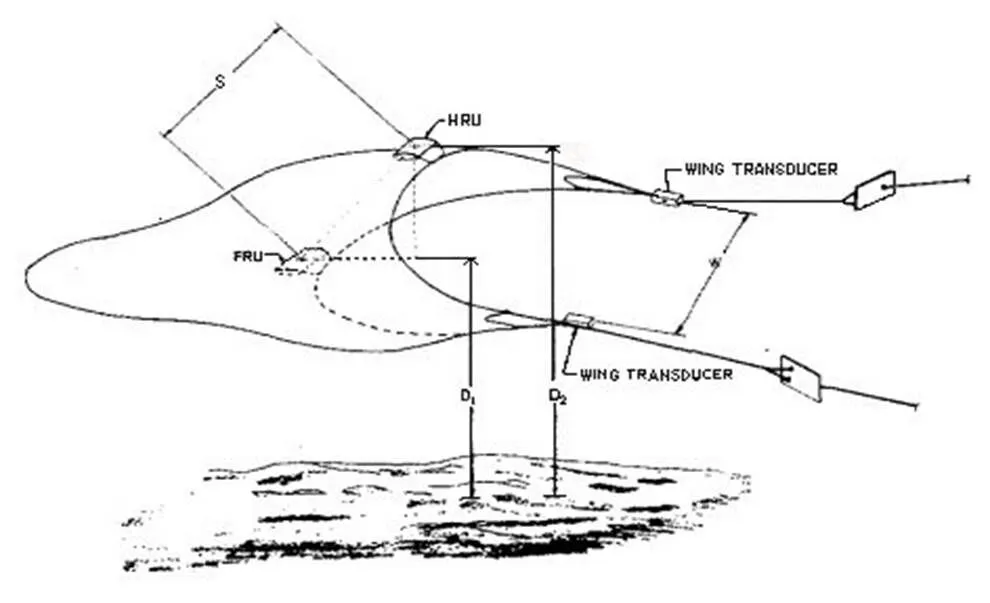
图 2 拖网改进原理图
目前加拿大的NTI公司就基于这种理论发明了一种拖网监视系统。这套拖网监视系统NETMIND ™由四部分组成:接收器,水听器,软件和传感器,分别安装在拖网上进行工作。这种新型拖网技术主要能够更好地监视和控制拖网过程,不仅提高了效率,更重要的是控制了拖网高度,尽量减少拖网与海床摩擦所产生的破坏。
2.2 深潜器技术
深海深潜器近年来越来越多地运用于人类对深海资源的探索。其中,对深海生物资源的探索也是极为重要的一环。深潜器最直观的优点在于科学家可以远程进行操控并且针对性高,也不会对深海环境造成破坏,但造价不菲。主要分为水下机器人和载人深海深潜器两种。
2.2.1 深海深潜机器人
水下机器人又称无人遥控潜水器,其工作方式是由水面母船上的工作人员通过连接潜水器的脐带提供动力,操纵或控制潜水器,采用水下电视、声呐等专用设备进行观察,并由机械手进行水下作业。在深海生物捕获中,水下机器人使用机械手把捕获的生物放入收集仓中带上水面。
2.2.2 深海载人深潜器
深海载人深潜器与水下机器人的不同之处在于可以把人携带进深潜器进入深海进行科学工作,类似于潜艇,其科技含量更高。
2.3 其他技术
除了上述两种方法外,还有一些针对某些特定的深海生物所设计的简单诱捕设备。比如把深度表绑在浮动的长绳上垂吊到海底下捕捉大型游泳生物;利用深海抓斗捕获底层底栖生物等等。
3 国内外深海生物捕获现状及收获
3.1 拖网技术的现状与收获
在利用拖网技术对较大型深海生物捕获方面,研究者们的收获颇丰。2008年,来自14个国家的科学家在北大西洋的马尾藻海(Sargasso sea)表层以下5000米处运用拖网捕获了一种漂浮的、相貌丑陋的片脚类动物(Amphipod),它是一种小型的、类似对虾的甲壳类。此外,专家们在这里采集了500多种生物,其中可能包括12个新物种。这也是我们目前了解到的生活在最深海域中的生物之一;在爱尔兰西北处约400里的大西洋深海处,考察者们通过深海拖拉船捕获到深海巨型蜘蛛蟹;在深海鱼类捕获方面,科学家们利用底拖网技术捕获深海贡式巨口鱼、深海白鰭袋巨口鱼以及宽咽鱼等等。
除了大型深海生物,研究者还利用两种特制的拖网技术对生活于3000~6000m的深海生物幼体进行捕获。而这两种拖网新技术在国内外运用的还比较少[5]:
第一种叫作多层矩形中层拖网RMT(Multiple RectangularMidwater Trawl),用于采集上升热液羽流中的热液生物幼体。该网由甲板上发出不同频率的声波来控制网的开闭装置。不足之处是没有可视装置,无法在近底层水平拖曳,因而很难采集到近底层热液生物幼体。
第二种用拖网和浮游生物泵挂在深潜器的侧面采集近底层热液生物幼体。但考虑到潜器活动范围、下潜时间以及安全性的多方面因素,拖挂的拖网网口比较小,滤水量不大,采集的幼体也不多。系统中浮游生物泵被安装在深潜器上,并下放到预定深度后开启动力泵,使大量海水流过滤网,捕获的悬浮颗粒物和微生物的滤网连同一定体积的水样密封于耐压样品容器中,但由于深海底大型生物的丰度低且泵过滤的水量有限,几乎采集不到底栖生物幼体等较大的生物,偶尔采到一些,也都是死的标本,因此这种方法不常使用。
3.2 深潜水下机器人的现状与收获
当今深潜水下机器人技术比较发达的是美国、日本以及一些欧洲国家,我国近年来在这个方面也取得了突破性的进展。
在利用深海深潜机器人对深海资源进行探测领域上处于领先地位的是美国。美国的伍兹霍尔(Woods Hole)海洋研究所从事研制深海深潜机器人以及深海载人深潜器两方面的工作,贡献巨大。他们在2007年研制的讷雷依(Nereus)号水下机器人对大面积洋底进行一般性测量以及收集生物标本,讷雷依(Nereus)号水下机器人能够在最大深度为6500~11000 m的世界海洋,其中包括北冰洋底[6]。在2009年,来自伍兹霍尔海洋研究所的专家对东南亚的西里伯斯海进行了一次为期4周的“探究深海物种进化”的科学考察,发现了大量以前未见的物种,并且还捕获了不少深海罕见的生物。所使用的技术就是一台名为“全球最棒的漂流者”的深潜水下机器人(如图3),它配备有高清晰度摄像头,能在深达3000米的水下工作,科学家可远距离操作,将水中抓获的生物存放在机器人的收集仓中。
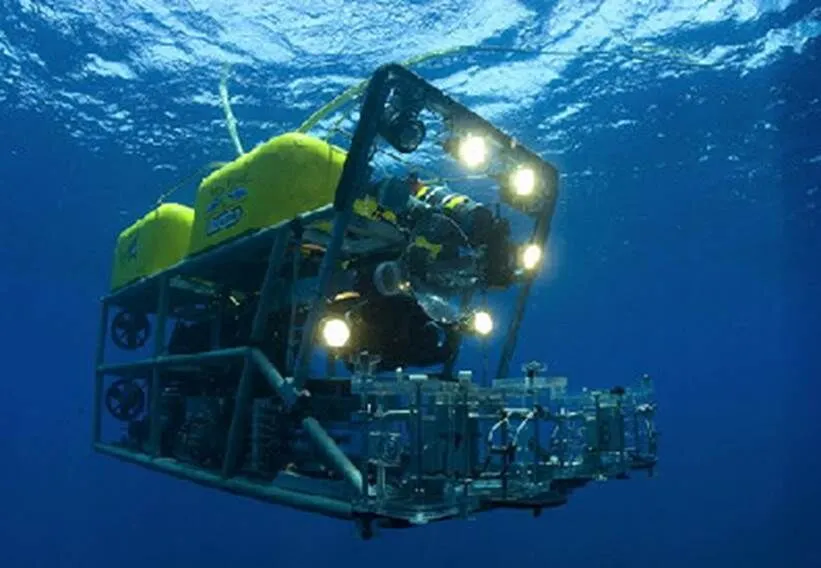
图 3 “全球最棒漂流者”水下机器人
通过这次深海采样,科学家捕获了不少深海生物,比如在2000米深的西里伯斯海捕获了一种长约3厘米,和普通药片差不多大小的等足目生物(如图4);在约2500米海域捕获了一种粉红色、透明的好似海参的生物等等。
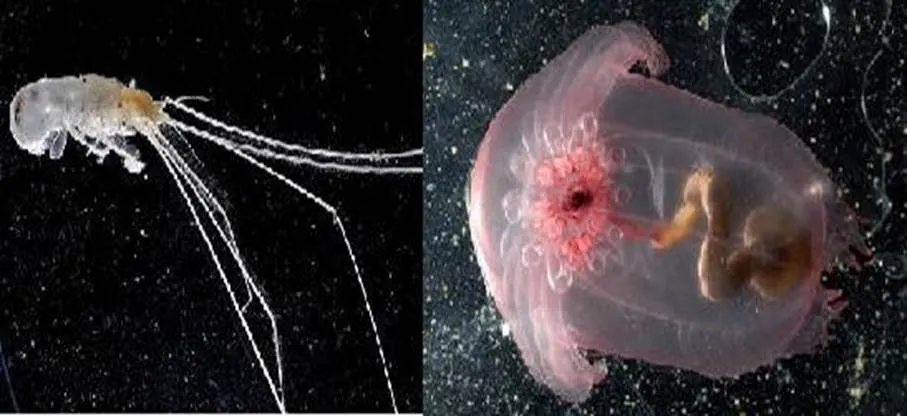
图4 “全球最棒漂流者”水下机器人所捕获生物
国内近年来在深潜器技术领域取得了突破,2008年5月在海南,目前我国下潜深度最大、功能最强的无人遥控潜水器(Remotely Operated vehicle,简称ROV)“海龙号”,亦称水下取样型机器人完成了3277米深诲试验,这在目前世界上只有极少数国家能够做到。该机器人将主要用于大洋深海生物基因和极端微生物的研究以及探索人类起源的秘密,同时也将进行各种水下作业。
3.3 深海载人深潜器的现状与收获
深海载人潜水器最初更多地应用在军事方面,近年来随着深潜器技术的突飞猛进,载人深潜器开始被广泛运用在深海科学研究中去。相比较水下机器人,深潜器能够将研究人员送入深海进行实地考察,研究人员可以近距离更直观的对生物进行研究。由于深海载人潜水器的特殊地位和作用,美、法、日、俄等国早已开展了深海载人潜水器的研制工作,而我国起步相对较晚。
国外方面,美国在无人潜航器中最具代表性的就是美国伍兹霍尔(Woods Hole)海洋研究所研制的阿尔文号(Alvin)深潜器。自建造以来,阿尔文号已下潜4100余次,每年的平均下潜次数保持在百次以上,对地壳构造、海洋化学、生命的起源以及深海物质的组成等基础研究起到了重要作用[6]。在深海生物方面的最著名的贡献就是于1977年历史性地发现了洋中脊上的黑烟囱和热液生物群落。如图5所示,科学家(Pilot)可随着阿尔文号的载人舱潜入海底,利用配备的机械手(Starboard/Port Manipulator)、生物取样器以及采样篮(Sample Basket)对深海生物进行采样和收集。据悉,2004年美国已决定斥资2000多万美元在6年内建造一艘功能更加完善的新概念ALVIN号潜水器[7]。
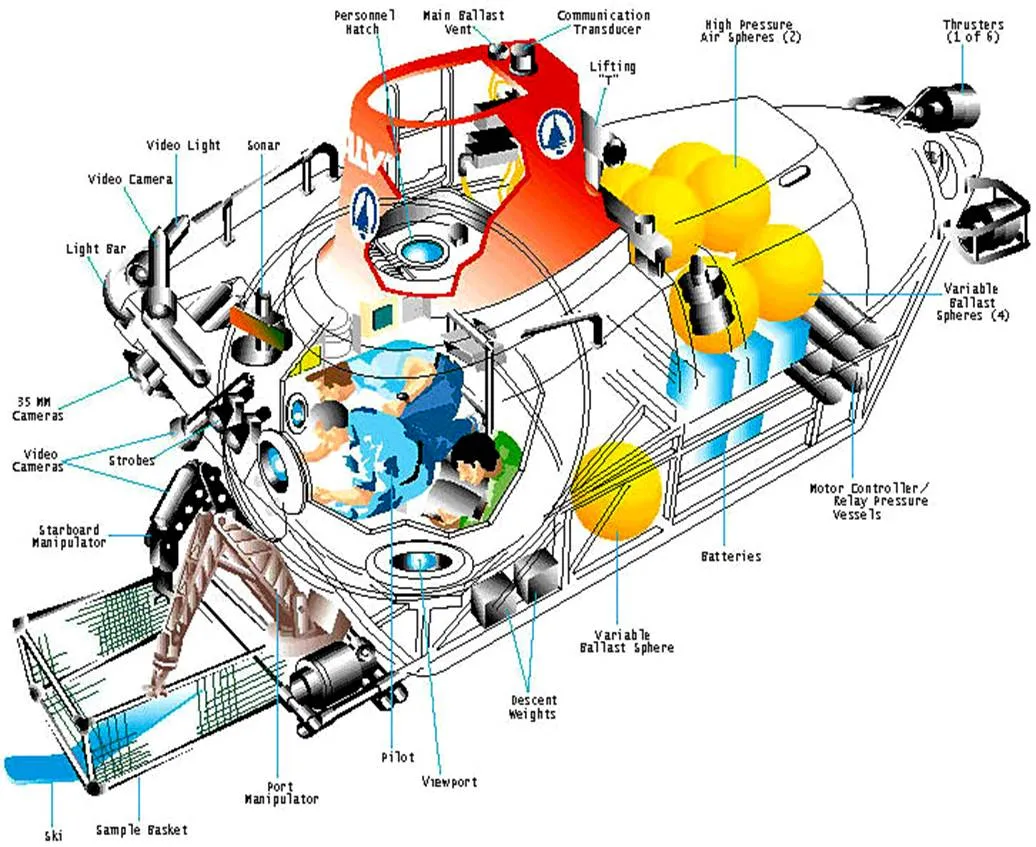
图5 阿尔文号(Alvin)深潜器构造简图
其他国家方面,日本海洋科技中心用钦合金做耐压壳建造了 “深海2000”号和“深海6500”号的潜水器,以及法国研制的“Victor 6000”号、Nautile号和Cyana号载人深潜器,都能在低至6000m的深海完成包括深海生物捕获考察在内的许多深海探索及捕捞工作。
我国的海洋事业起步较晚。近年来,海洋开发和海洋科研逐步和国际接轨,开始走向深远洋。我国在载人深潜器领域最大的突破是研制的7000米载人深潜器(如图6),此载人深潜器需花5小时下潜至7000米深海,整个作业时长可达12小时。潜水器类似美国阿尔文号能容纳3个人,一名操作员,两名科学家。在潜水器的前端,是一个密闭的玻璃,潜水科学家可以通过这里看到外面的世界。潜水器装有两只机械手,可以进行抓取等水下工作。潜水器可用于深海生物基因的采样及研究等多项工作。
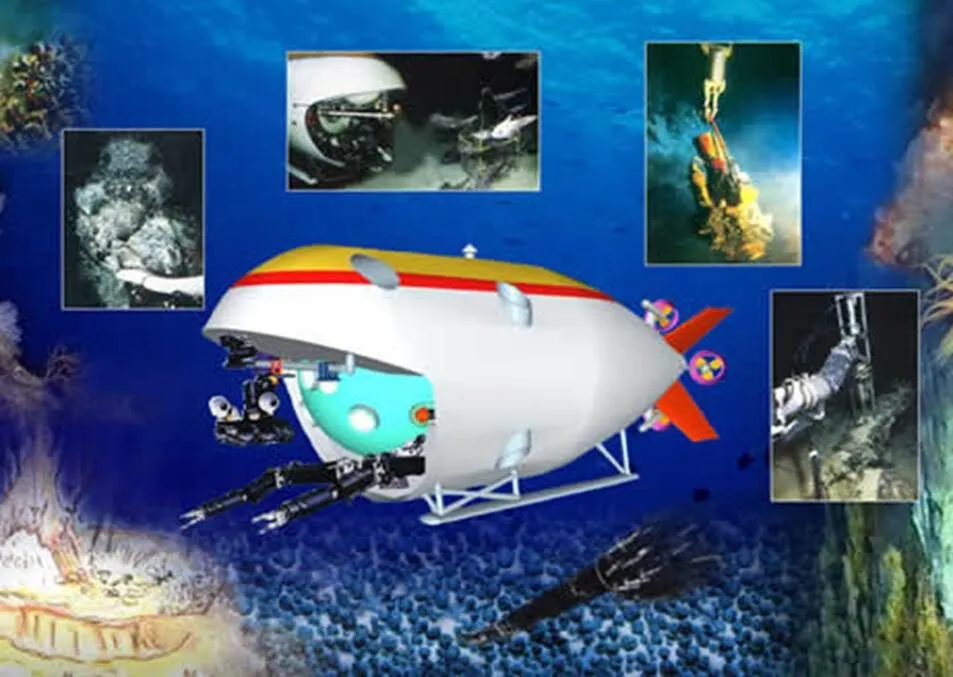
图6 我国研制的7000米深海载人深潜器
3.4 其他诱捕技术的现状与收获[8]
此外,科学研究者也会针对所要捕获的生物的特性设计一些比较简单的诱捕设备来进行采样。
比如在针对大型深海游泳生物捕获方面,2005年,来自日本的两位科学家在水深900米的海中将摄影机和深度表绑在浮动的长绳上垂吊到海底。他们在摄影机下面挂着小乌贼当诱饵,并且用一袋切碎的虾来引诱大章鱼。当一条长约8米的大乌贼用触角缠绕住诱饵后,就被隐藏在其中的挂钩给钩住了,绑在长绳上的摄影机拍下了前前后后捕获的过程。
而针对一些小型深海生物,研究人员研制了一种像双瓣贝壳的“大洋抓斗”,在撞击到海底时能快速闭合,将样品全部“抓”到斗内。但它容易扰乱样品,不利于精细研究。为此又设计了箱式取样器、重力取样器和活塞取样器等,将它们垂直下放到海底,利用特殊装置迅速将样品完好地取上来,这样就能对沉积物逐层加以研究。
4 对深海生物捕获技术的探讨
4.1 捕获技术的展望
就目前的技术而言,水下机器人以及载人深潜器无论制造还是使用都需耗费极大的人力财力,远远超过了普通研究机构的承担能力。拖网技术虽然使用较为广泛,但是除了存在会破坏深海生态环境的弊端以外,捕获的针对性和成功率都比较低。最为关键的是,无论拖网或深潜器都不是专门针对捕获设计的,其捕获功能的经济实用性太低。因此,越来越多的研究人员正在开发一种既经济又实用、专门针对深海生物捕获的简单设备,比如一些深海生物诱捕设备。
所谓的“诱捕”,即是转“主动捕获”为“被动诱捕”。研究者根据深潜器的耐压构造原理[9-10],设计建造一个耐压的笼体,笼内放有诱饵,笼体上带有类似蟹笼的诱捕口,笼体外装有蓄电池、重锚、浮标、无线通信设备以及水下声学通信设备。把此诱捕笼放入海底,一段时间后,通过水下声学释放器等设备控制其上浮并通过无线通信设备定位回收。此设计可通过改变诱饵来更换捕获的对象,针对性较拖网技术有很大提高,而且不会破坏深海环境,也不需要深潜器那般庞大的经费支持。
4.2 深海生物捕获待解决的难点
目前对深海生物捕获存在着一个难题,就是所捕获生物的存活率。也就是说,当今的采样技术在捕获稍微大型的生物的时候,很难克服保压的问题,往往把深海生物从海底捞上来的过程中生物已经死亡,在采集深海生物幼体方面也具有同样的难题,没有保压装置所采集的幼体出水面时已几乎全部死亡(除了极个别的蟹类大眼幼体能在1个大气压下经历变态发育过程外)。
为此,各国的研究者开始对保压转置进行了研究。目前对深海微生物的活体采样已经可以实现,使用的方法是多网分段/分层生物幼体保压取样器,可以保持高压取样筒体的压力,即6h的压力变化不超过10%[3]。接下来,针对中大型深海生物捕获装置的保压问题也急需得到解决。
5 结语
21世纪是属于海洋的世纪,海洋中有着巨大的资源等着人类去探索和发掘。深海作为海洋最神秘之处,是地球表面生物多样性最为丰富的地区,因此,对深海的生物进行捕获研究以及发现深海新的物种,进而对深海极端海洋生态系统中的生物资源、生物多样性进行系统的比较研究,对人类揭示生命的起源以及研究生物对特殊环境的适应能力有着极为重要的科学意义。目前,国际上对深海生物资源的探索愈来愈热,各国科学家都争先恐后地探索着这片人类知之甚少的宝地,深海生物资源也已成为世界各国的战略发展资源,许多发达国家在制定针对本土生物资源保护和可持续发展规划的同时,更是把目光转向国际公共深海区域的竞争和开发。因此,我国要在今后日趋激烈的国际深海公共资源的竞争中取得领先地位的话,就必须尽快发展海洋事业,发掘深海生物资源。
[1] 游隆信.深海生物及其生存环境[J].生物学教学,2004,29(1):54-55.
[2] 王丽玲,等.深海热液喷口生物群落研究进展[J].地球科学进展,2008,23(6):604-612.
[3] 刘少军,等.深海保真取样器研究及其虚拟样机实现[J].机械工程与自动化, 2005,(2):1.
[4] Charles W.West. Development and Application of Bottom Trawl Instrumentation Systems in Fisheries Resource Assessment[J].OCEANS,1984, Jan 6th,2003.
[5] 葛朝平.深海近底层多网分段/分层生物幼体保压取样器研究[D].杭州:浙江大学硕士学位论文,2008.
[6] Andrew D.Bowen.The Nereus hybrid underwater robotic vehicle for global ocean science operations to 11,000m depth[J].OCEANS, 2008, Sept,1-10.
[7] 顾继红,等.(美)伍兹·霍尔海洋研究中心载人深潜器计划探究暨(美)新概念ALVIN号载人深潜器关键技术浅析[J].船舶,2008,(2):8-12.
[8] Jonathan Byron.Designing a Vertical / Horizontal AUV for Deep Ocean Sampling[J].OCEANS,2007,Sept.29 -2007,Oct. 4 2007, 1-10.
[9] 苗兰森,等.深潜器大开口球形耐压操纵舱结构模型的力学性能[J].海洋技术,2005,(6):20-24.
[10] 苟鹏,等.深潜器多球交接耐压壳结构性能研究[J].舰船科学技术,2008,30(3):54-59.
魏翀,weichong3310@yahoo.com.cn。
