教学型可编程数字控制机械手设计
2009-10-12崔小松肖建章
崔小松 肖建章
目前,机器人已经广泛应用于各个领域,其中工业机器人在现代化工业国家正在得到越来越广泛的应用,各种类型的工业机器人不断进入市场,这要求有更多掌握机器人技术的人员,能够正确操作和使用机器人。为了适应这一社会需求,开发模拟工业机器人系统的实验教学系统就成为紧迫需要。而作为机器人技术、计算机技术及机电一体化技术教育的教学工具,对人才培养和高新技术的推广应用有着重要的意义。目前市场上所提供的教学型机器人或机械手一般价格在十几万元左右,且不具开放性,即用户只能高端应用而无法根据需要进行多层次开发。因此,研制一种低成本开放性的机械手应用于机电一体化教学实验是非常必要的。
本文以工业自动化应用中最广泛的装配机械手为教学实验系统的开发目标,以四个自由度机械手为例,研究在PLC 控制下实现手动及自动等多种工作方式,为学习机电一体化技术提供一种理想的教学实验装置。
一、系统结构设计
教学型机械手实验系统作为一种工业机器人系统的模拟系统,首先要在总体结构和控制功能上最大限度地反映实用工业机器人样机的主要特征,如机电一体化的系统构成方式等,同时能做到结构简单,操作方便。
根据此设计理念开发的可编程数字控制机械手由人机界面、机械部分和电气部分三部分组成。整个系统结构框图如图1所示。

图1 系统结构图
1.机械部分
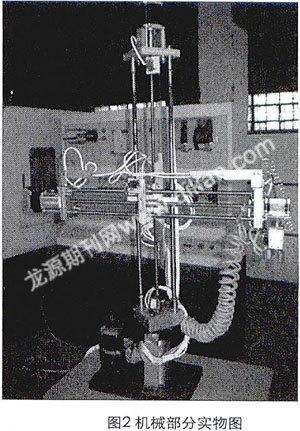
机械部分有两个直线运动轴,即X、Y轴,两个旋转方向,即底座与抓手。X直线轴采用步进电机与梯形螺纹丝杆直接连接;Y直线轴采用伺服电机与梯形螺纹丝杆直接连接;抓手的旋转用步进电机与汽缸直接连接;底座的旋转用步进电机通过1:1同步带轮传动。另外加上回零、限位及其他附件组成。抓手直接装到汽缸上,选用不同类型的抓手可以实现移动不同产品的功能。机械部分如图2所示。
2.电气部分
电气控制部分采用西门子S7-200 PLC控制三个步进驱动器和一个伺服驱动器,再由驱动器分别控制三台步进电机和一台伺服电机实现机械手直线移动和旋转动作。各个轴的控制数据由人机界面(触摸屏)输入。编辑功能也由人机界面编辑,参数的写入也通过人机界面。人机界面和PLC通过通讯线实现数据的交换。控制信号由PLC发出,抓手的夹紧、松开通过PLC控制汽缸来实现。
为了实现用一个高速脉冲输出口Q0.0控制四台电机,实际项目中,通过具有16个I/O口的EM223来扩展高速脉冲输出,从而达到控制三台步进电机和一台伺服电机速度的目的。
3.人机界面
本设计采用MT500触摸屏。该触摸屏具有功能强大的中文编辑软件,轻松完成复杂的人机界面设计;具有手写留言板功能,具有实现三级用户口令保护的功能;具有标准内置的RTC和配方功能,支持一机多屏和一屏多机的系统连接;双通讯口和独立的打印接口(MT506产品不支持打印接口);可为OEM用户的专用控制器开发专门的通讯协议驱动。
人机界面主要是完成对机械手的运行方式的修改、运行参数的设定及修改、运行状况实施现场监控、报警等功能。
二、系统软件设计
1.系统功能概述
本系统软件设计主要完成对机械手的监控及运动方式的设定。机械手运行状况的监控及运行参数的设定可以由人机界面完成。PLC主要是将人机界面下达的各种指令对机械手进行控制,并将机械手的运行状态上传到人机界面。
2.PLC控制程序
根据机械手的工作过程要求,确定各动作的先后顺序和相互关系,得出机械手控制流程图。PLC 控制程序主要有回零方式、手动方式、单步方式、单周方式和自动方式。
另外,为了使机械手始终运行在安全状态下,四个动作的八个方向都有安全限位,并且对各种报警都有报警提示。为了达到以上控制要求,PLC程序是很复杂的。我们合理地利用了西门子PLC步进编程的优势,用步进构成整个程序的骨架。然后对于每个骨架分别用基本指令和功能指令完成预定的动作。由于该机械手是典型的位置控制方式,所以在程序上多使用功能指令。这样由步进指令构建整个程序的骨架,再合理的利用功能指令。使得整个复杂的程序层次分明,更改和调试就变得容易了。
3.人机界面设计
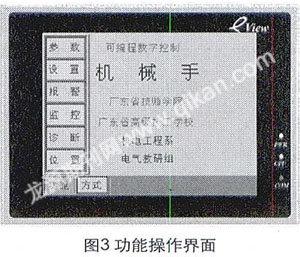
人机界面(触摸屏)的画面在其支持软件上制作,通过软件工具库的工具调用以及相关项的设定或通过宏定义可设计出所需画面。这些画面从个人电脑传送到触摸屏即可使用,而触摸屏与PLC通过RS-485通信电缆连接可实现信息互通。在画面的设计调试过程中,也可从触摸屏上传画面到计算机对画面进行修改。图3为人机界面的一个画面。
三、机械手实验
本实验系统可以满足PLC、气压技术、传感器技术、机电传动等课程的实验要求,开设的实验有:
认识性实验:PLC(西门子S7-200)及其软件、变频器、电动机、减速器、带传动、传感器、机械手、稳压电源、空气压缩机、气压缸、电磁阀等。
应用性实习:逻辑控制、顺序控制、定时控制、计数控制、步进控制等。
设计性实习:机械手控制、步进电机及伺服电机的正反转及调速控制、数码管显示控制、检测剔除控制。
创新性实习:模拟量控制、立体仓库、步进电机控制、伺服电机控制等。
该实验装置系统已研制完成,通过验收,并且经过学生实习,收到了满意的效果。
(作者单位:广东省技师学院)
