全回转起重船作业过程稳性仿真
2007-09-20张明霞夏益美肖进军
张明霞,夏益美,林 焰,肖进军
(1.大连理工大学 船舶CAD工程中心,辽宁 大连116024;2.烟台打捞局,山东 烟台264000)
随着海洋事业的发展,大型海上工程如跨海大桥的建设方兴未艾,海洋油气开发项目也持续不断,除了海上设备安装之外,平台拆除也提上议事日程。我国有近百座海上建筑物已列入拆除计划。海上工程的施工,都需要起重船。起重船作业过程是一个庞大复杂的系统工程,成本极高,作业环境又非常复杂:在极短时间内起吊数千吨重物,即在短时间内船舶排水量急剧增加数千吨之多;按规范,吊重的重心要算在吊钩以上的滑轮心轴上,该点距水面数十米,甚至上百米,使全船的重心一下提高很多;起吊重物的重量与吊幅的乘积产生巨大的倾斜力矩,船舶浮态在短时间内发生巨大变化,静倾角可能达到7°~8°[1]。
目前,起重船在实际作业过程中,往往是根据操作手册或者依据操作者经验。在操作手册中,通常只能选取典型的几种装载状态,进行稳性计算校核。不仅工作量大,也不能够全面地显示实际作业过程中起重船的性能特点。这给整个作业过程留下了安全隐患。以1 700t全回转起重船为背景,将计算机实时仿真技术引入作业过程,在实际施工之前用计算机进行模拟施工,就能提早发现施工过程中存在的一些不确定因素,以便采取相应的措施,提高作业过程的可靠性、经济性及安全性。
1 仿真实现方法
当今用于可视化仿真的工具软件很多,但是多数只能够离线制作动画进行仿真。为了达到稳性仿真的实时性,则必须从底层开发三维视景系统。
OpenGL是美国从事高级图形和高性能计算机系统生产的SGI公司开发,可独立于操作系统和硬件环境的三维图形库。目前它已成为开放式的国际图形标准,被广泛地应用于科学计算可视化、模拟仿真等诸多领域。
1.1 起重船几何建模
要使可视化系统直观、准确、生动,起重船几何物理模型的建立是至关重要的。
OpenGL没有提供高级命令函数来定义复杂的三维形体,只提供了基本的点、线和多边形方式构造3D模型。这就要利用一些优秀的商业建模软件建模,在OpenGL中加以采用并进行实时控制。
为此,采用分层建立模型的方法[2]。以建立起重机的模型为例,起重机吊臂的运动有俯仰运动,旋转运动等。可把起重机进行分层建立模型。在3dsMAX中,把具有相同运动的物体组合成object如:起重机座,起重机压载箱等。在导出3ds文件时先后选中每个object,选择Export Selected命令,分别导出每个object。按实物尺寸,以1∶1的比例,灵活运用3dsMAX的编辑方法,得到起重船几何建模。
1.2 起重船几何模型的读取
在OpenGL中建立自己的数据结构存储模型数据;从3ds文件中读取数据将其存储到OpenGL程序中;建立OpenGL绘制模型的显示序列。
1.3 OpenGL中起重船模型的重现
首先设置像素格式,接着进行投影变换和视口变换,然后进行灯光、材质、颜色等的设定,最后自定义函数实现模型重绘。
由于读取和再现程序简单,这里不再列出。
2 起重船作业过程的稳性计算
2.1 坐标系定义
采用两个左手直角坐标系研究船体的空间位置:与静止海面相固定的固定坐标Oξηζ;与船体相连的船体坐标系OXYZ。船体坐标系的原点O选在船的基平面、中横剖面和中纵剖面的交点上,规定X轴指向船首为正,Y轴指向右舷为正,Z轴向上为正,见图1[3]。

图1 坐标系
针对起重船的特殊性,增加一个局部左手直角坐标系:与船体相连的起重机坐标系O′X′Y′Z′。起重机坐标系的原点O′选在起重机基座上表面、起重机的重心面和船的中纵剖面的交点上,规定X′轴指向船首为正,Y′轴指向右舷为正,Z′轴向上为正,见图1。
2.2 船舶浮态数学模型
在计算起重船的完整稳性时,由于只考虑垂直力的作用,只要一个线坐标和两个角坐标参数就可以确定船舶的位置。选择符拉索夫参数为浮态参数,包括平均吃水Tm、横倾角θ和纵倾角φ。其中平均吃水是在船体坐标系Z轴上自坐标原点O到水线面的距离,基准面以上为正;θ是在船体中横剖面上量取的,向右舷横倾为正;φ是在船体中纵剖面上量取的,首倾为正[3]。
为了描述起重机的具体状态,增加了两个起重臂的参数,包括起重臂的俯仰角α,起重臂的旋转角β,见图2(O′C为起重机吊臂)。

图2 起重臂参数示意图
由空船重量m1(包括燃油、物品等)、起重机和吊重重量m2、压载水重量mj(j号舱)及船体几何外形等信息建立船舶浮态方程组,通过求解浮态方程组求得浮态参数:

式中:m——船舶总重量;
xc、yc——船舶重心坐标;
x2、y2——起重机和吊重的重心坐标;
w——吊重。
2.3 起重船作业过程的稳性计算
利用已知的船型数据、各压载水舱室的数据和起重机数据文件,在作业范围内调整起重臂俯仰角、旋转角,求出当前的实际载况,进而计算浮态、稳性等参数,完成完整稳性的计算[3]。系统流程见图3。

图3 全回转起重船作业稳性计算流程图
3 作业过程的运动仿真
3.1 软件开发
仿真系统是在Windows2000平台下用Visual C++6.0开发完成的。利用3dsMAX获得3D模型,在VC6.0环境下调用OpenGL函数,读入模型,并对起重船在虚拟环境中进行作业时的交互仿真。系统由输入输出接口模块、完整稳性计算模块和仿真功能模块组成[4]。
系统的输入输出接口实现人机交互功能;仿真系统的主要部分包括完整稳性计算模块和功能模块。功能模块主要包括:根据起重臂状态实现吊装任务的运动模拟,根据完整稳性计算结果实现船舶的姿态模拟(首尾吃水,左右舷吃水等),同时显示船舶的稳性曲线。
3.2 仿真结果及分析
以1 700t全回转起重船为例,起重船的主尺度见表1,起重机性能参数见表2。

表1 主尺度
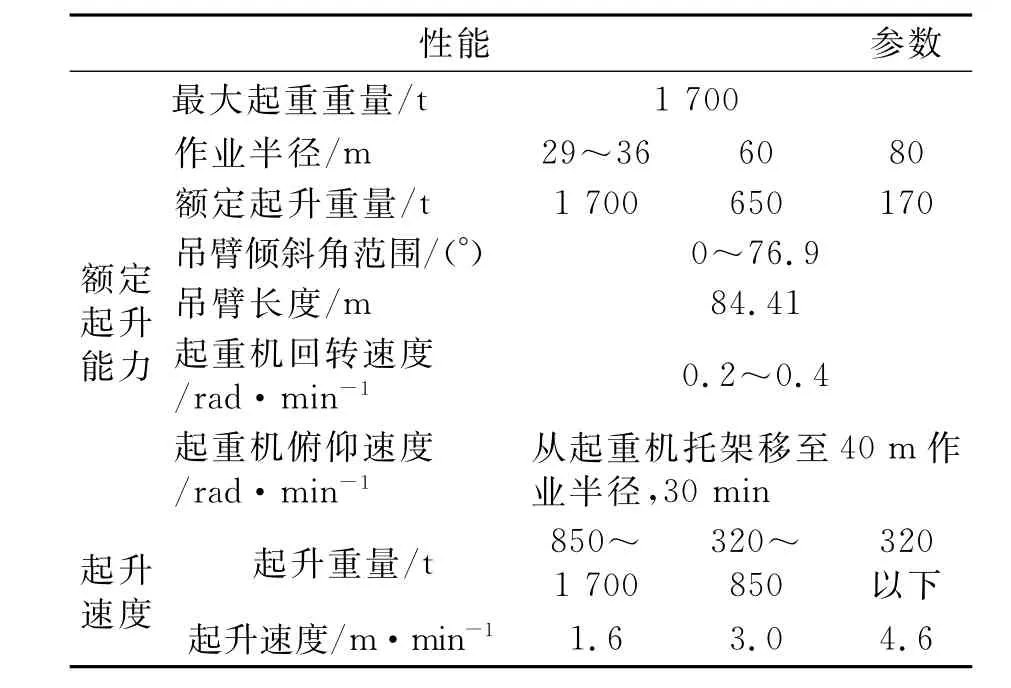
表2 起重机性能参数
3.3.1 仿真结果
起重船载况主要分为三类[5]:拖航状态,作业状态,避风状态。起重船作业状态又分为:全回转作业和180o回转作业。起重船180o回转作业是指起重机荷重达到一定重量后,由于船舶安全限制,无法完成全回转作业,只能在船舶一舷作业。
该起重船最大起重能力1 700t,半回转作业,作业半径范围31~36m,如表3中的载况一、二;据船东反映该起重船经常在吊重560t,作业半径63m时作业,如表3中的载况三;该起重船最大作业半径80m,如表3中的载况四[6]。因此考虑四种典型作业载况,见表3作业工况参数。分别对这四种载况进行作业稳性实时仿真。

表3 作业工况参数
作业后船舶部分参数值见表4,稳性结果见图4~7。

表4 作业后船舶部分参数值*

图4 作业过程各船舶横倾角变化

图5 作业过程中吊重倾侧力矩变化

图6 作业过程中规范要求初稳性高GM′变化

图7 作业过程中船舶稳性衡准K变化
3.3.2 结果分析
起重工程船作业时主要性能要求满足文献[5]相关规定。
1)横倾角的变化规律如图4所示,吊重倾侧力臂如图5所示。在作业过程中,随着起重臂旋转,吊重的倾侧力臂和船体浮态逐渐发生变化。在吊臂旋转到一侧与船体中心线垂直的位置时,船体的横倾角达到最大,如果吊重过大或作业半径过长,均会导致船体浮态超出安全浮态范围(规范要求一般横倾角<5°,纵倾角<2°)[5]。
对于全回转起重船,根据起重机使用要求(横倾角<2°)[5],因此吊重一旦超过一定范围,船舶浮态很容易就超出规范要求,为了安全作业就必须事先进行反向预压载,以保证作业过程船舶横倾角限制在规范要求范围之内,此时起重船就不能全回转,只能实现180°回转。
2)规范要求的初稳性高GM需要满足文献[5]规定。GM′的变化规律如图6所示,和表4中作业后船舶初稳性GM相比,起重臂旋转过程中,船舶初稳性高均富裕,可以较容易满足规范要求。
3)稳性衡准数K的变化规律如图7所示,在起重臂旋转到与船体中心线垂直的位置(即吊臂呈90°)时最小,而180°时达到最大。一般情况下都可以满足规范要求。就作业状态而言,180°回转作业(载况一,二),稳性衡准数较小,其变化范围也较小,是起重船作业稳性较差的工况。
4)根据表4中部分计算结果,作业过程中,即在起重臂旋转到与船体任意位置时,满足规范中拖航要求。
从上面分析看出,起重船的吊臂旋转到90°或与船体垂直时,是危险状态,此时船舶的初稳性高、横倾角、稳性衡准数等均为最小,而吊臂旋转到180°时或与船体平行时,各项指标达到最大。各项指标随着吊臂的旋转而呈周期变化规律。因此在作业前,必须先根据吊重、作业半径对船舶进行预配载,以求作业过程不致横倾角因过大而导致危险。
4 结束语
起重船作业环境以及作业条件是事先无法预料的,需要根据实际需求进行起吊,因此吊重有时比较重,有时比较轻,作业半径也随着实际作业需求而发生变化。因此对起重作业船来说,面临的最主要的问题就是在接到工程任务后,能够快速地进行作业前预配载,保证船舶作业过程安全可靠,同时作业过程可以实时监测,以提高起重工程船的作业效率与作业安全可靠性。
通过对全回转起重船作业过程进行实时稳性仿真,对四种典型载况分别进行计算分析,结果表明吊重越大、作业半径越大,其作业危险性增大的结论。此方法可以作为起重船作业安全性预报,为安全作业提供理论依据;可以根据仿真结果进行多次反复预配载调试,直到浮态与稳性等各项指标满足规范要求为止;同时本文工作也为起重船作业过程的实时监测提供技术支持,可以随时监测作业过程船舶浮态与稳性变化情况,及时发现潜在的危险,从而提高作业的安全系数,最终提高起重工程船的经济效益。
另外,作业时波浪也会对船舶的浮态与稳性造成一定影响,应该对其进行分析。这样计算仿真结果才更加可靠,更加接近实际海况。本文对波浪影响尚未考虑进去,这也是下一步继续研究的工作内容。
[1]张志明,徐丹铮,张 超,等.大型起重船船型开发的若干技术问题初探[J].船舶,2005,2(1):10-15.
[2]Mohammed F.Daqaq.Virtual Reality Simulation of Ships and Ship-Mounted Cranes[D].Virginia:The Virginia Polytechnic Institute and State University,2003:5-32.
[3]盛振邦,杨尚荣,陈雪深.船舶静力学[M].上海:上海交通大学出版社,2000:33-167.
[4]钱 能.C++程序设计教程[M].北京:清华大学出版社,2002.
[5]中国船级社.国内航行海船法定检验技术规则[S].北京:人民交通出版社,2004:171-174.
