“三段六环”教学模式的实践与思考
2024-04-09金建树
金建树
【摘 要】本文介绍了童红东名师工作室的“三段六环”教学模式,无人驾驶(窄路曲行版)教学案例设计为虚拟机器人教育的教学实践提供参考,最后对“三段六环”的教学模式做出反思与展望。“三段六环”的教学模式设计与实践可以引导教师开发更丰富的课程资源,发掘更多信息科技学科内涵的思考与理念。
【关键词】三段六环;虚拟机器人;教学模式
【中图分类号】G434 【文献标识码】A
【论文编号】1671-7384(2024)02、03-070-03
“三段六环”教学模式概述
根据文件《浙江省学生信息素养提升实践活动的通知》要求,各地电教馆和青少年科技协会均开展了青少年机器人竞赛活动。随着机器人竞赛的兴起,童红东名师工作室成员不仅在中小学课堂开展了机器人教育,也尝试创新教学模式,为机器人教育注入新的活力。
实体机器人虽然效果不错,但很多学校设备有限,无法开展实体机器人教学。在没有经费保障的前提下,虚拟机器人教育不失为一个好的课堂教学形式。程序设计,是培养中小学生分析问题和解决问题能力的重要途径之一。因此,工作室结合基础教育信息科技课程标准,在五、六年级大力开展萝卜圈虚拟机器人教学活动。
经过工作室多年的探索,我们总结和提炼了“三段六环”教学模式。所谓“三段”,就是将虚拟机器人教学分为三个阶段[1]:第一阶段是准备阶段,让学生进入活动状态,发现问题;第二阶段是学习阶段,自主或合作分析、解决问题,编写图形化程序、仿真测试,引导学生通过多样的方法培养逻辑思维能力;第三阶段是延伸阶段,鼓励学生展示和评价,制定评价指标,完善评价体系,做到真实践、真体验。所谓“六环节”,就是课堂活动通过热场、探问、讨论、实践、思辨、展评六个环节展开。
“三段六环”教学模式案例
本文以童红东名师工作室“三段六环”教学模式为指导,以无人驾驶(窄路曲行版)教学案例设计为例具体阐述该教学模式的实践。
无人驾驶(窄路曲行版)任务要求:在一个虚拟的城市环境中,学生们需要设计一个机器人汽车,并模拟实现各种无人驾驶交通行为。
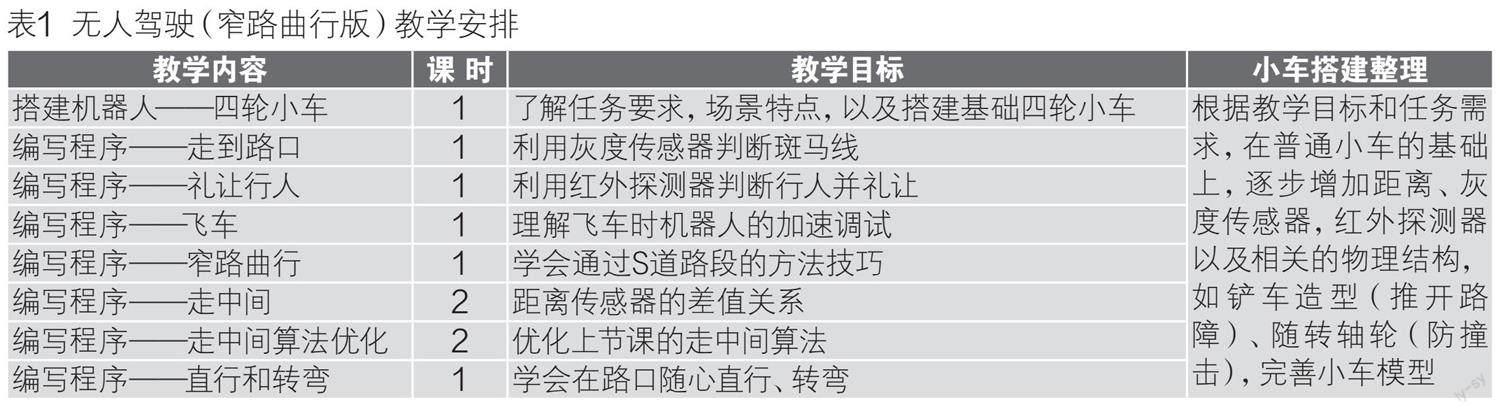
針对任务要求,教师采用“三段六环”的教学模式,搭建具备实现多种功能的机器人,编写复杂的子程序调用算法,以提高学生的计算思维和问题解决能力。经过工作室成员讨论,教学内容包括搭建机器人——四轮小车,编写程序——走到路口、礼让行人、飞车、窄路曲行、走中间算法、走中间算法优化、直行和转弯,小车搭建整理一共10课时(表1)。
以无人驾驶的走中间算法优化为例,课堂教学分为三个阶段:第一个阶段是让学生回顾上节课所学,发现当前这个走中间算法的缺陷,引出变量新知;第二个阶段是自主或合作分析,引导学生优化算法思路,实践仿真;第三个阶段是展示与评价,根据评价指标打分,鼓励学生发挥创意,促进思考与交流,继续优化算法。三个阶段通过下面六个环节展开。
1.热场
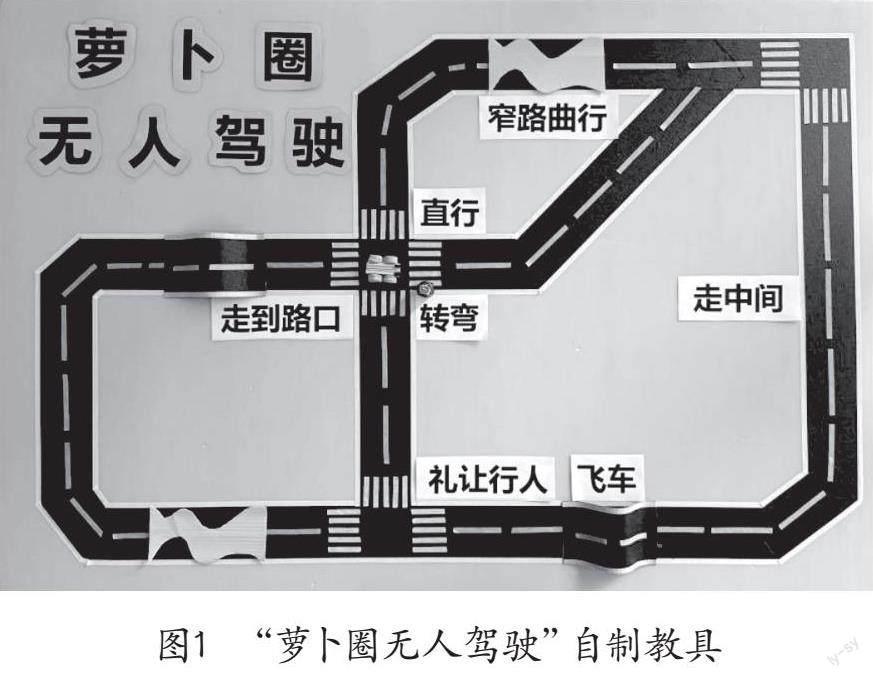
热场是具有情境性的,一是明确本节课的主题,二是激发学生兴趣,引导学生自主参与学习并能够积极思考,去获取一个有价值和意义的成果。在设计无人驾驶(窄路曲行版)课程的教学过程中,我们多以“萝卜圈无人驾驶”自制教具(图1)来创设情境,模拟过斑马线、礼让行人等。
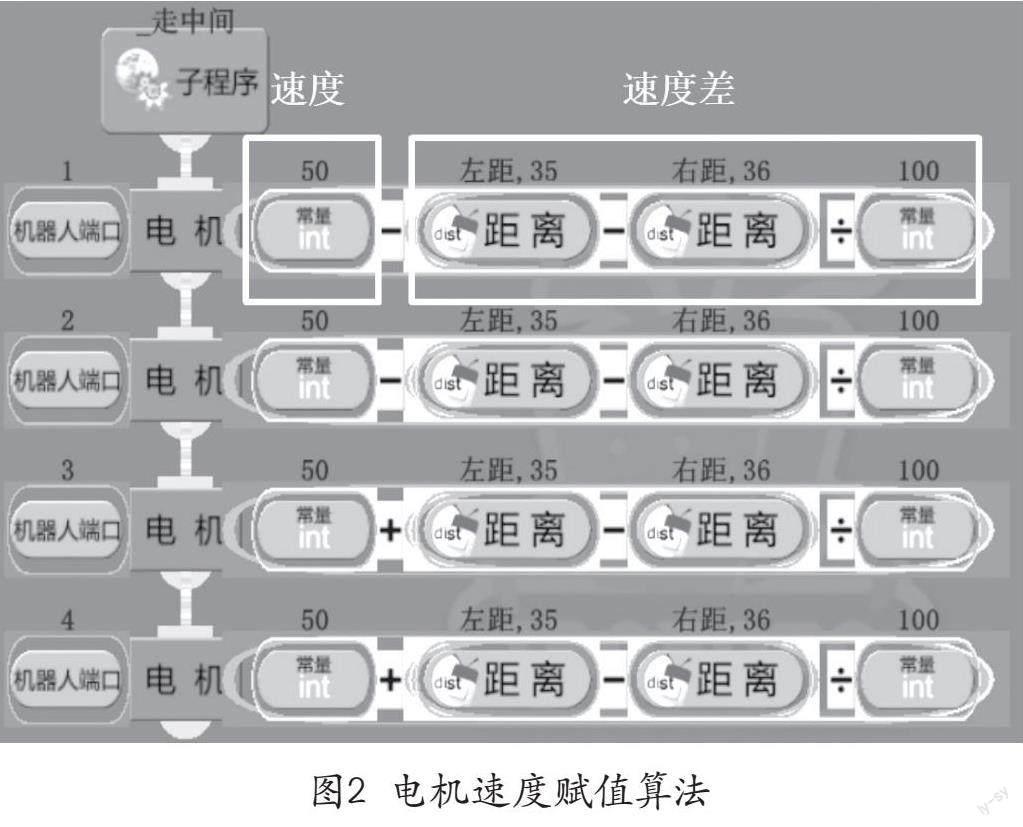
由于是算法优化课,所以我们对上节课的无人驾驶的子程序“走中间”的算法,进一步细化分析,引导学生思考回顾四轮小车如何躲开路障以及其他小车,走在赛道中间,不撞到护栏。图2呈现上节课较为严谨的电机速度赋值算法。
2.探问
探问是探究的起点,是一颗求知种子,教师不只是传道授业解惑,更要激励学生展开思考。想让学生有价值地思考,就要提出有价值的问题。优化算法的目的是使算法更加地简单、明了,方便阅读和记忆。当前算法最明显的问题是繁杂和冗余。学生在进行仿真调试时,需要四次修改速度和灵敏度,容易出现操作失误并浪费时间。因此,教师提出了一个问题:是否有一种办法可以一键调整我们需要修改的参数?
从探问引出本节课优化算法的新知——“变量”。对于“变量”,在程序中使用一个变量时,需要在使用前声明该变量,以速度常量转换成变量为例,先声明后引用。
3.讨论
讨论即自主或合作的一种吸纳互补的学习方式,针对学习能力的差异,教师将学生进行项目分组,最好能根据学生的学习情况和性格特点来科学、合理地分组,保障组员的参与度和积极性。组内学生可以进行自由的讨论,找出方法和对策,解决疑问,激发学生的主动性,发掘每位学生的潜力,激发他们的探究欲望。通过讨论帮助学生快速了解变量声明、变量引用的使用方法,以及解决相关的疑问,如为何使用全局变量?使用局部变量行不行?两者有何区别?
通过讨论,学生可能会构建出各种碎片化的答案。例如,全局变量可以被任何子程序使用;局部变量不行,这个速度可能别的子程序还要用;全局变量主要是为了增加函数间的数据联系;通过碎片化地吸纳互补知识,解决疑问,总结出问题的答案。
4.实践
讨论只能获取表面知识,学生可能了解现象但不理解原因,这显然意味着学习的深度不够。因此,必然需要一个体验、感悟的过程,引导学生理论联系实际,从实践中获得真知。由于四个机器人端口均为速度-速度差,因此,我们可以结合速度差变量和赋值语句,速度差=(左距传感器-右距传感器)÷灵敏度,这里灵敏度使用的是常量100。
学生通过实践发现,在赋值语句中,速度差的大小可能出现负数或者小数,教师提醒学生回顾之前学过的知识,以及联系数学学科,类比和迁移,利用“运算模块”中的“求绝对值”和“浮点转换成整型”两个模块,可以计算出正整数的速度差值。
速度差=FtoInt(Abs(左距-右距)÷100),根据括号的作用,得出图形化编程的速度差赋值。
5.思辨
思辨是对实践的一个有效反馈,即思考与分辨,思考实践中如何避免这种错误,以及分辨这种错误产生的原因。有些学生会在操作运算模块时受堆叠顺序的影响而出现错误。然而,通过积极参与错误的应对处理[2],可以帮助学生培养观察意识、问题分析和解决问题的能力。本节课的重点在于变量模块的使用,通过一系列递增的问题,大部分学生能够理解变量模块的使用方法。同时,联系数学与信息科技知识的介绍使得学生更有效地理解运算模块中“求绝对值”和“浮点转换成整型”的使用方法。
这个操作过程会导致公式变成:速度差= FtoInt(Abs(左距一右距÷100))。将学生的错误操作转换成公式表达,可以让学生立即理解错误的原因,即括号影响了运算顺序。因此在教学过程中可以将这种错误作为一个反面教材,加深学生对运算公式的理解。
6.展评
虽然无人驾驶仿真有系统分数,但学生之间存在差异,导致并非所有学生都能在规定时间内完成任务要求。这种终结性评价可能会降低基础较差学生的积极性,同时也会影响学习热情的持续。因此,萝卜圈虚拟机器人教学环节中的展评显得尤为重要,合适的评价指标体系不仅鼓舞学生,也能增强他们的自信心和创造力。
本节课的展示与评价要求每组选出一名学生,讲解走中间的优化算法并展示无人驾驶仿真测试,听听大家的建议与意见[3]。同时其他组的学生可以从三个方面对该组的展示进行评分,分别是“作品的功能与性能(4分)”“完成作品过程中的技术使用和最终呈现(4分)”以及“作品的创意与个性(2分)”。详细的评价指标如表2所示。
由于“创意与个性”的继续优化、创新算法相对有难度,故分值设置较低,避免学生绞尽脑汁去创新,而忽略本节知识要点。通过展评,有学生提出继续优化算法,将灵敏度作为一个变量,根据检测到的前距传感器的大小,以700为一份,把距离传感器的最大值3000划分为5份。算法无穷尽,学生将在不断的思考中提升自我,突破自我。
“三段六环”教学模式反思与展望
尽管“三段六环”为萝卜圈虚拟机器人课程提供了良好的教学模式,但在实践后,工作室汇总了诸多问题。例如,有些学生不习惯个性化的教学模式,所以在实施“三段六环”教学活动之前,要了解本课程学生固有的学习方法与习惯;在“讨论”环节,教师应巡视了解学生讨论的状态和过程;在教学模式实验初期,教师发现很多由于“讨论”环节讨论目标不明确而导致“实践”和“思辨”环节失败的案例,需要根据课堂突发情况,及时调整教学方式。教师可以根据教学内容和学生差异,进行环节调整或取舍,把握好“三段六環”的逻辑性和连贯性。
我们希望通过“三段六环”萝卜圈虚拟机器人教学模式,让学生亲历、体验虚拟机器人完成任务的全过程,掌握虚拟机器人的知识和技术,培养信息素养,提升学习能力。未来,我们将尝试加入“多线程”的活动设计,在资源和问题的驱动下,聚焦学生解决问题的方式,更关注对学生个体活动效果和完成任务能力的评价。
参考文献
孙莉. 虚拟机器人教学的研究与思考[J]. 基础教育论坛,2019(28): 21-22.
彭俊醒. 基于萝卜圈虚拟机器人的初中信息科技课堂教学实践研究[D]. 重庆:西南大学,2020.
郑吉俊. 机器人课程中虚实结合的机器人教学策略研究[D]. 南京:南京师范大学,2019.
作者单位:浙江兰溪市香溪中心小学
编 辑:卢秋红
