基于模型预测的AUV 轨迹跟踪滑模控制方法
2024-03-20黄浩乾郑康健马惊天
黄浩乾,郑康健,马惊天
(河海大学 能源与电气学院,南京 211100)
欠驱动自主水下航行器(Autonomous Underwater Vehicle,AUV)精确跟踪能力是水下探测、救援和特殊水下任务的技术基础[1]。欠驱动AUV 是一种独立控制输入小于运动自由度数的AUV,与全驱动AUV 相比,它在降低系统能耗、成本和质量、提高系统可靠性方面更有优势,因此在工程实践[2]中得到了广泛应用。欠驱动AUV 的运动方程具有非线性、耦合、水动力参数时变和外界干扰等特点,增加了运动控制的难度[3]。因此,欠驱动AUV 的轨迹跟踪问题已成为研究热点[4]。目前用于欠驱动AUV 轨迹跟踪控制算法的主要有滑模控制[5]、反步控制[6]、自适应控制[7]和模型预测控制[8]等。滑模控制结构简单,鲁棒性强,常用于欠驱动AUV 轨迹跟踪。为了解决状态和控制输入量化影响下的潜在量化问题,通过对滑模控制的有关项增加量化误差的界,提出了一种轨迹跟踪控制律。反步法在轨迹跟踪控制中也很常见,因为它可以降低系统的复杂性。文献[9]利用滑模技术对系统参数变化的不敏感特性,将无抖振滑模控制器应用到AUV 上,获得较好的跟踪控制效果,但外界扰动未作考虑,且不能保证系统自适应估计项的有界性。为了克服不确定性、未知参数和外界干扰对系统的影响,彭玉东[10]提出了一种新的反演控制结构,主要针对AUV 悬停问题,但没有考虑轨迹跟踪问题。自适应控制对系统参数的变化具有较强的适应能力,并具有较强的抵抗外界干扰的能力,因此常与其他控制方法结合使用,以消除外界干扰,增强系统的鲁棒性[11]。Qiu 等通过构造自适应滑模控制律实现了模型参数不确定情况下的轨迹跟踪控制[12],但没有考虑输出最优化,提高计算利用率问题。而在实际AUV 应用中,推力限制、安全工作区域等系统约束是不可避免的,因此在设计跟踪控制器时需要考虑这些约束。
模型预测控制(Model Predictive Control,MPC)是一种基于优化的时域控制方法[13],在处理多约束、多变量和不确定控制问题方面具有良好性能,为解决控制问题提供了一个强大的控制框架[14,15]。2017 年,Shen 等提出了一种用于AUV 平面轨迹规划与跟踪的编队控制方案,并给出了跟踪控制[16]稳定条件。2018年,Gan 等提出了一种基于量子粒子群优化(Quantum-behavioral Particle Swarm Optimization,QPSO)模型的无人潜航器(Unmanned Underwater Vehicle,UUV)三维轨迹跟踪控制预测控制算法,并考虑了滑模控制对系统参数变化和扰动的不敏感性,综合应用。但是,求解开环最优控制问题会带来计算量。随着问题规模的增加,计算复杂度呈指数级增长。为了解决MPC 的计算复杂度,采用了数值延拓、事件触发控制[17]和离线预计算等策略。对于AUV 的跟踪控制,由于所要求的轨迹具有时变特性,需要找到更好的解决方案。另一种旨在降低非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)在线计算负荷的策略。通过将六自由度动力学方程分解为三个相互作用较小的子系统,可实现分布式求解。然而,由于MPC 通过求解优化问题来确定控制信号,控制信号是系统状态的隐函数,给分析闭环稳定性带来了巨大的挑战,特别是对于AUV 等非线性系统。然而,如前所述,局部线性化不适用于AUV 轨迹跟踪。
综上所述,目前基于MPC 控制的AUV 轨迹跟踪存在以下三个问题:(1)在海流干扰和模型参数不确定情况下AUV 跟踪轨迹误差较大;(2)标准MPC 设计需要对所制定的优化问题使用终端约束,并通过局部线性化构造相应的辅助稳定控制律,然而,局部线性化并不适用于AUV 轨迹跟踪;(3)在AUV 运动过程中,会有执行器饱和与抖震的问题,从而不能确保系统的稳定性。针对上述问题,本文提出一种基于滑模辅助控制器同模型预测控制相结合的方法,解决欠驱动AUV 轨迹跟踪问题。主要贡献如下:
(1)针对在海流干扰和模型参数不确定情况下AUV 跟踪轨迹问题,设计滑模控制算法,利用滚动优化和反馈校正补偿不确定项和海流干扰的影响;
(2)针对MPC 算法局部线性化问题,提出滑模与模型预测控制相结合的方法,能够处理系统动力约束问题,避免MPC 局部线性化问题;
(3)针对执行器饱和与输出抖震问题,设计滑模控制器作为辅助控制器,在解决执行器饱和的同时,还能避免系统抖震,从而确保系统的稳定性。
1 问题描述
为研究AUV 的运动轨迹,将6 自由度AUV 运动分解为3 自由度(纵荡、横荡、艏摇)的AUV 的水平运动。欠驱动AUV 模型具体如图1 所示。
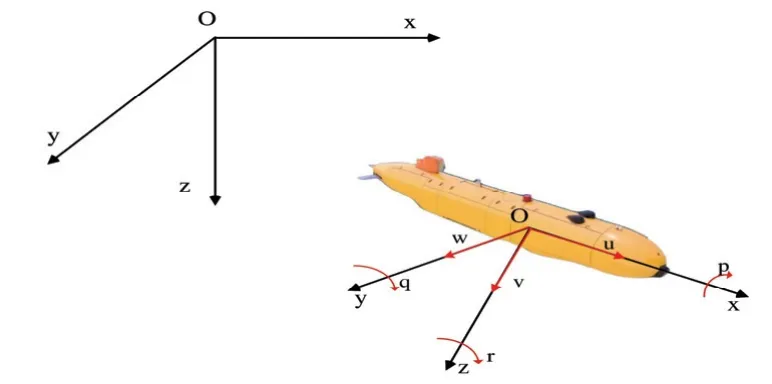
图1 AUV 模型Fig.1 AUV model
忽略纵摇、横摇和垂荡相对应的变量,运动学方程如式(1)所示:
其中,η=[x,y,Ψ]T表示位置向量p=[x,y]T和方向Ψ,式(1)中为η导数;v=[u,v,r]T表示AUV 速度向量;J(Ψ)表示旋转矩阵,如式(2)所示:
运动学与AUV 静止或匀速行驶时的平衡有关,而动力学与AUV 加速运动有关。3 自由度非线性动力学运动方程可以方便地表示为:
其中,M为系统惯性矩阵,C(v)表示科里奥向心矩阵,D(v)表示阻尼矩阵,g(η)表示恢复力矩阵,τ表示控制输入,d表示扰动。
令τω=d-g(η),将式(1)与式(3)结合,可以建立新的AUV 跟踪问题系统模型:
将x=[x,y,Ψ,u,v,r]T定义为新的状态变量,τ=[τu,τv,τr]T定义为新的控制变量。为更加直观的展示AUV 各状态变量之间的关联关系,将式(4)展开为以下形式:
AUV 模型的以下特性推导较为容易,并在控制器设计中加以应用。
特性1:初始矩阵是对称正定且有上界:0<M=MT≤< ∞(其中I 为3 阶单位矩阵);
特性2:科里奥向心矩阵是反对称矩阵:-C(v) =C(v)T;
特性3:旋转矩阵的逆矩阵满足以下特性:J-1(Ψ) =J(Ψ),并且满足表示二范数);
特性4 :阻尼矩阵是正定矩阵:D(v) >0;
其中atan2 表示四象限正切逆算子。则式(3)可写为:
2 基于Lyapunov 模型预测轨迹跟踪控制器设计
在本文考虑模型不确定和存在干扰的场景中,AUV 可以跟踪预定轨迹,并且在设计的控制器作用下,可精准地跟踪预定轨迹,从而达到想要的效果。
控制器原理框图如图2 所示,共包含三部分:AUV、辅助控制率、MPC 控制器;其中辅助控制率可以生成局部AUV 的稳定性约束,即计算约束MPC 优化问题的最优输入。

图2 AUV 轨迹跟踪原理图Fig.2 Schematic diagram of AUV trajectory tracking
2.1 辅助控制率设计
为了构造收缩约束,需要找到一个状态反馈控制器以及相应的Lyapunov 函数。针对AUV 轨迹跟踪问题,利用反步法设计基于Lyapunov 的非线性滑模控制器。η=[x,y,Ψ]T表示 AUV 的实际轨迹,ηr=[xr,yr,Ψr]T表示期望轨迹,定义以下变量变换:
可以将v看作一个虚拟控制,从而得到:
令α1=,代入式(15)(16)得:
选取一个Lyapunov 函数:
其中Κp=ΚpT>0,对V1求导得:
为使V2正定,选取以下控制率:
利用非线性滑模辅助控制器的帮助构造收缩约束,由于滑模项的引入,控制输入会出现不连续性,从而导致抖振问题。在这里采用一种具有动态边界层的饱和函数sat 代替符号函数sign,引入边界层会导致稳态误差,影响系统稳定性。这里通过调整边界层厚度,使其随着状态轨迹的收敛而逐渐收缩,最终与切换平面重合来减少系统输出抖振并保证系统的渐进稳定性。首先引入接近角概念,接近角λ是系统状态轨迹与切换平面之间的夹角,会随着状态轨迹接近切换平面而不断减小。通过λ来描述状态变量收敛的程度,并以此设计边界层厚度函数μ(λ) =tan(λ)。基于该边界层厚度函数可以得到动态边界层的饱和函数:
最终设计的控制器为:
那么,可以建立AUV 轨迹跟踪控制的直观MPC约束如式(27)-(30)所示:
其中,x(s)为预测控制,τ(s)的预测状态轨迹,利用系统模型从x(t0)演化而来为误差状态;为控制误差;S(δ)为以采样周期δ为特征的分段常数函数,T=Nδ为预测区间;权重矩阵Q、P、R都是正定的。但众所周知,由于预测界有限解的最优性不能自动保证闭环稳定性。为了遵循这一重要的闭环特性,需要进行复杂的离线设计。对于AUV等非线性系统,采用标准MPC 设计技术,需要进行局部线性化,以选择合适的加权矩阵并构造辅助的局部反馈控制律。此外,如引言所述,对于AUV 跟踪曲线参考局部线性化是不合适的。
为避免局部线性化,同时保证MPC 跟踪控制的闭环稳定性,设计滑模控制的辅助非线性跟踪控制律,并通过在原MPC 公式中添加收缩约束来解决滑模模型预测控制(Silding Model Predictive Control,SMPC)问题。
其中h(•)为辅助的基于Lyapunov 的非线性跟踪控制律,V(•)为对应的Lyapunov 函数。收缩约束式(35)的存在能够证明SMPC 控制器继承了状态反馈控制h(x)的稳定性属性。此外,由于在线优化过程,SMPC控制器将自动执行最好的跟踪控制。
基于SMPC 控制器的轨迹跟踪控制将以递减的方式实现,控制算法总结在算法1 中。

递归的可行性和闭环的稳定性都不依赖于优化的精确解。在算法1 中,次优解是完全可以接受的,这对于任何非线性MPC 算法都是非常可取的。由于系统动力学是非线性的,使用迭代方法,式(34)最佳保证解是局部最优解。更重要的是,在计算资源有限的嵌入式系统上实现时,迭代次数可能会受到实时控制的限制。换句话说,实时控制与次优解的兼容性限制了数值效率和控制性能之间的灵活性。可以在不破坏跟踪控制的情况下,通过指定最大迭代次数来轻松地进行权衡。
因此,收缩约束式(35)的详细表达式为:
2.2 稳定性分析
为了证明MPC 的稳定性,此处定义V3(k)为Lyapunov 函数,即:
二次函数恒大于0,因此正定性得证,即:
再证明V3(K+1) ≤V3(K)即可证明其稳定。
因此V3(k+1) ≤V3(k),稳定性得以证明。
3 实验结果
在本节中,通过建立两个对比仿真实验来验证SMPC 算法在AUV 系统中进行轨迹跟踪的有效性。第一种情况是不存在外部干扰的情况下,对AUV 的轨迹跟踪进行了测试。第二种情况是存在参数未知且有干扰的情况下,通过引入未知参数和干扰来测试系统的鲁棒性。仿真结果表明,该方法具有良好的跟踪性能和鲁棒性。
3.1 参数选择
参考轨迹为正弦曲线,具体如下:
对于SMPC 算法的控制器,使用以下参数:采样周期δ=0.1s,预测范围T=5δ,权重系数设为Q=diag(105,105,103,102,102,102),P=diag(103,103,102,10,10,10),R=diag(10-2,10-2,10-2),每个输出区间为[-400,400],控制增益为Κp=Κd=diag(5,5,5),初始条件为
3.2 仿真结果与分析
(1)轨迹跟踪实验
在SMPC 控制器的作用下,具体的跟踪效果如图3 和图4 所示,其中黑色的曲线为参考轨迹曲线,红色的曲线为在SMPC 控制器作用下AUV 运动轨迹曲线,蓝色曲线为基于反步法的滑模控制器(Sliding Controller,SC)下的运动轨迹。

图3 参数已知且无干扰轨迹跟踪Fig.3 Track tracking with known parameters and no disturbance
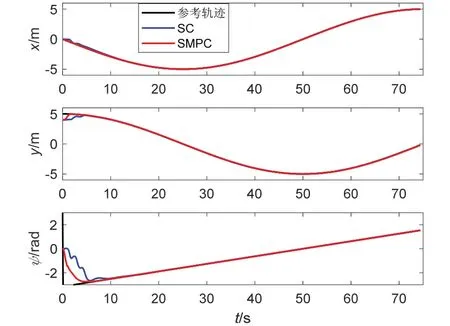
图4 参数已知且无干扰下各位置跟踪图Fig.4 Location tracking with known parameters and no disturbance
从图3 可知,相较于SC 控制器,在SMPC 控制器的作用下AUV 可以更为准确快速地跟踪参考轨迹,并且追踪效果更好,充分验证了闭环的稳定性。同时,仿真结果验证了提出SMPC 控制算法的有效性。具体无干扰情况下均方误差(Mean Square Error,MSE)如表1 中所示,所提方法均方误差较SC 提升60%以上。

表1 无干扰情况下两种算法均方差Tab.1 Mean square error of two algorithms without interference
每个推进器所需的推力如图5 所示,可以看出,在跟踪刚开始时,SMPC 控制器使用的推力接近极限值,以便进行最快的收敛,而SC 控制器则超出规定的最大推力,且跟踪效果不如SMPC 控制器。整体而言,SMPC 控制器控制输出的大小始终保持在预期的允许范围内,并达到最快的跟踪效果。采用滑模模型预测控制计算出的控制输出对于实际系统而言也是可行的,并且可以快速收敛至预定轨迹。
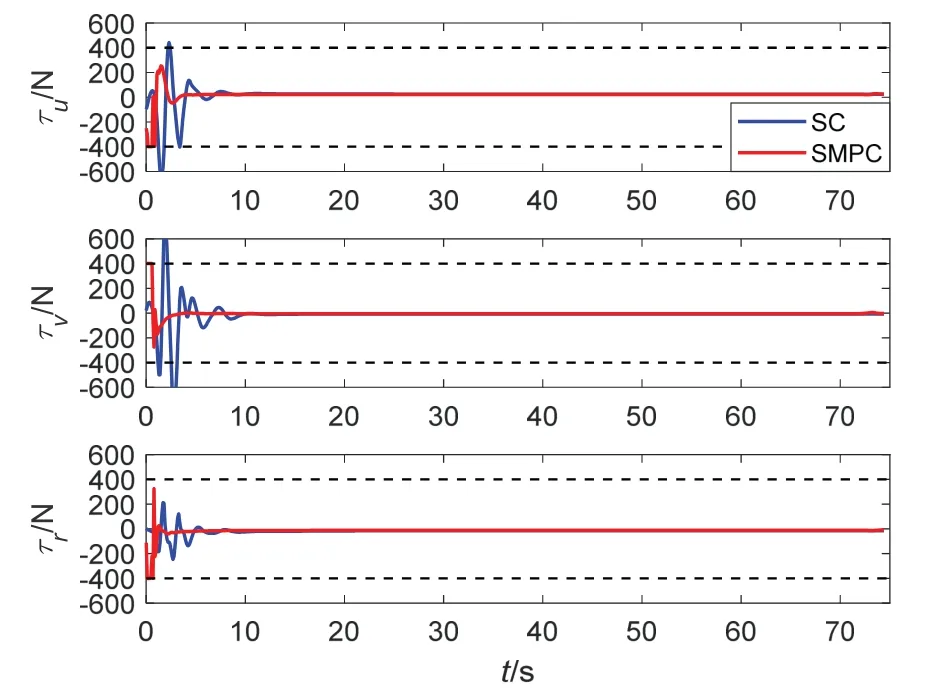
图5 参数已知且无干扰下系统输出Fig.5 System output with known parameters and no disturbance
(2)鲁棒性实验
滑模控制和模型预测控制通过反馈引入到闭环系统中,从而使得SMPC 控制拥有极强的鲁棒性和抗干扰能力,为了测试鲁棒性,对鲁棒性跟踪控制进行了研究。为了证明SMPC 的跟踪控制:引入模型恢复力参数(未知且有界)和洋流扰动。在仿真过程中,模拟海洋扰动与不确定参数范围τω∊[ -1 00,100]。
在图6 所示的仿真结果中,对比普通的SC 控制器,可以发现基于SMPC 的跟踪控制仍然能使AUV较快地收敛至期望的轨迹,证明所提出算法具有较强的鲁棒性和抗干扰能力。通过图7 可以看出,即使在存在干扰的情况下,AUV 控制输出的大小始终保持在预期的允许范围内,但在SC 控制器作用下,AUV 推力大小超出规定范围。从而进一步验证了所提算法的稳定性。
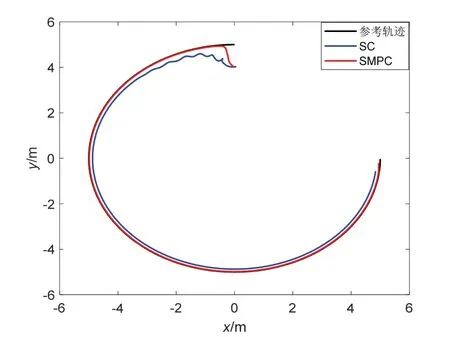
图6 参数未知且有干扰轨迹跟踪Fig.6 Unknown parameters and disturbance trajectory tracking

图7 参数未知且有干扰系统输出Fig.7 Unknown parameters and disturbance system output

图8 参数未知且有干扰各位置跟踪图Fig.8 Tracking diagram of each position with unknown parameters and disturbance
通过以上两个仿真可以看出,本文提出的SMPC算法在模型参数不确定和干扰情况下都具有良好性能,在跟踪实验中,SMPC 算法控制的AUV 可以快速跟踪轨迹。在鲁棒性实验中,虽然存在一定误差,但是在SMPC 的作用下,AUV 可以利用在线优化来调度适当的控制增益来补偿干扰和参数不确定带来的影响。因此,SMPC 控制显著提高了轨迹跟踪控制的鲁棒性和稳定性,如表2 所示,在有干扰情况下与SC算法相比均方误差明显提升。
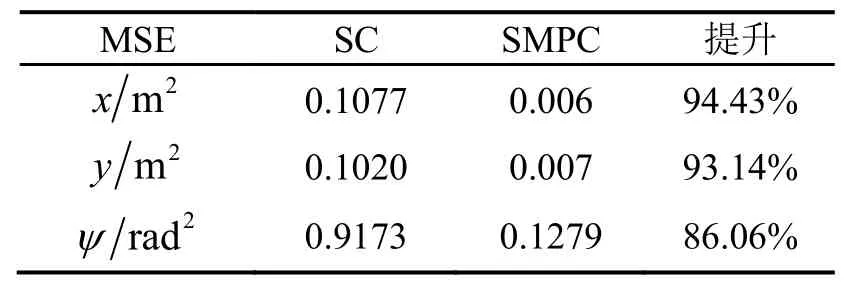
表2 有干扰情况下两种算法均方差Tab.2 Mean square error of two algorithms under interference
4 总结
在复杂的水下环境中,AUV 轨迹跟踪普遍存在海洋干扰、参数不确定等问题。本文从3 自由度AUV出发,根据以上问题提出一种用于AUV 轨迹跟踪的SMPC 控制算法。在滑模辅助控制器基础上,加入了在线优化,从而极大提升了控制性能和鲁棒性,并基于李雅普诺夫稳定性定理证明了整个闭环跟踪系统的稳定性,最终将本论文设计控制器应用于欠驱动AUV进行轨迹跟踪仿真实验,结果表明,本文所设计控制器具有较高的跟踪精度和较强的鲁棒性。
文中轨迹跟踪是在无障碍物的情况下进行的,而实际水下环境复杂,会导致AUV 与障碍物发生碰撞,因此未来会考虑在AUV 碰撞情况下,对系统设计相应的控制器,今后将结合不同的控制器进一步研究避碰情况下的轨迹跟踪,以实现系统的精确控制。
