面向手眼标定的改进灰狼优化方法
2024-02-29李晟尧肖世德赖焕杰胡锴沣
李晟尧,肖世德,2,赖焕杰,胡锴沣
(1.西南交通大学机械工程学院,四川 成都 610031;2.轨道交通运维技术与装备四川省重点实验室,四川 成都 610031)
1 引言
目前越来越多的制造业企业开始使用基于机器视觉技术的智能机器人以提高产能。英国的罗孚汽车公司[1]利用带有机器视觉的智能机器人提高了车身轮廓尺寸的检测精度和速度。瑞士ABB公司的Flex Picker机器人[2],使用机器视觉技术,引导机器人进行工件的快速准确分拣。机器视觉技术可以使机器人获得更丰富的环境信息,提高机器人在愈加复杂的工作环境中完成预定工作的能力。为了能利用机器视觉技术引导机器人运动,需要对机器视觉智能机器人进行手眼标定,从而获得摄像机坐标系与机器人末端执行机构坐标系之间的位姿变换矩阵。
目前,专家学者已经提出了很多用于手眼标定矩阵求解的解析方法。其中,较为经典的有文献[3]提出的基于几何关系的算法,文献[4]提出的基于李群和李代数的算法,文献[5]提出的基于单位四元数的算法以及文献[6]提出的基于对偶四元数的算法。但是,以上算法都只是从数学分析的角度出发,求解手眼标定矩阵,算法的鲁棒性不强,如果拍摄的标定板图像质量不佳,或者机器人位姿读取结果不准确,求解的手眼标定矩阵可能不准确。为此,文献[7]在欧氏群下定义了一种手眼标定误差的衡量标准,从而可以将求解手眼标定矩阵转换成非线性优化求解问题,但算法过分依赖初始值,容易陷入局部最优解。文献[8]提出一种利用初始标定结果重新生成机械手拍照位姿的手眼标定方法,该方法需要利用k-means 算法反复聚类重算拍照位姿,较为繁琐。文献[9]提出了一种基于差分进化算法的手眼标定方法,能够很好地避免局部最优,但算法迭代次数较多,速度较慢。
这里针对眼在手的智能机器人视觉系统,通过结合维度学习策略和差分进化算法,提出了一种改进灰狼算法的手眼标定方法。通过分析误差公式,设计用于降低手眼标定误差的机器人拍照位姿生成方案,利用传统手眼标定算法得出解析解后,利用改进灰狼算法进行非线性优化,避免了陷入局部最优等问题。该方法简单,容易实现,而且优化迭代速度较快,优化结果较好。
2 手眼标定的数学模型
假设机器人坐标系、摄像机坐标系和标定板坐标系之间的关系,如图1所示。其中,{W}坐标系是世界坐标系,{E}坐标系是机器人末端执行机构坐标系,{C}坐标系是摄像机坐标系,{G}坐标系是标定板坐标系。
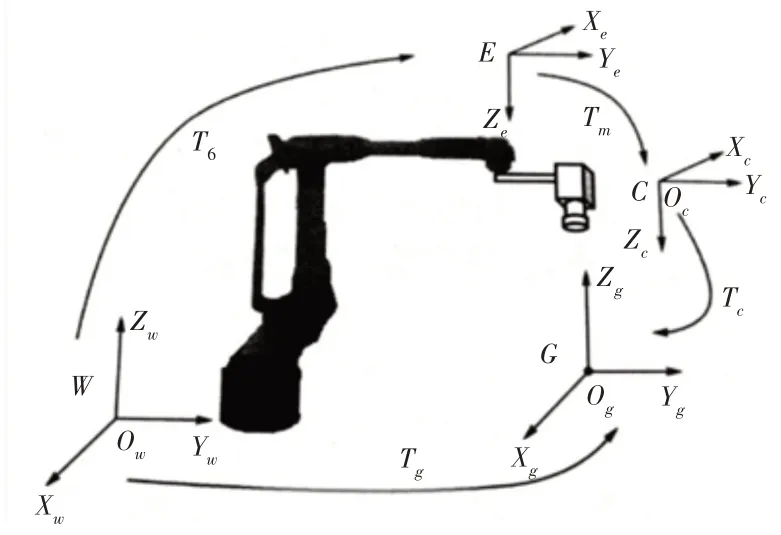
图1 机器人坐标系示意图Fig.1 Schematic Diagram of Robot Coordinate System
定义T6为坐标系{W}到{E}的变换矩阵,Tm为坐标系{E}到{C}的变换矩阵,Tc为坐标系{C}到{G}的变换矩阵,Tg为坐标系{W}到{G}的变换矩阵。
由坐标系之间的变换关系,可得:
固定标定板的位姿,然后操作机器人,在不同的机器人末端位姿下,标定摄像机相对于标定板的外参数Tc。对于第i次和第i-1次标定,由于Tg保持不变,由式(1)得:
式中:T6i—第i次标定时坐标系{W}到{E}的变换矩阵T6;Tci—第i次标定时摄像机的坐标系{C}相对于标定板坐标系{G}的外参数Tc
式(2)经过整理,可以改写为:
3 机器人拍照位姿生成方案
Tsai不仅提出了基于几何关系的手眼标定算法,同时还以拍摄三张标定板图像为例,给出了误差公式:
式中:σR—R的等效旋转轴k的均方根误差;Err(R)—R的等效旋转轴k的最大误差幅值;σP—P的均方根误差;Err(P)—P的最大误差幅值;cond(A)—‖A‖‖A-1‖。
其中,A满足:
由式(6)可以看出影响手眼标定误差的因素有:
(1)相邻的拍照位姿之间的等效旋转轴之间的角度,例如∠(kg12,kg23);
(2)相邻拍照位姿之间的等效旋转角度θgij(=θcij);
(3)摄像机坐标系的原点到标定板坐标系的原点之间的距离|Pci|;
(4)相邻拍照位姿机器人的末端执行机构的坐标系原点之间的距离|Pg1-Pg2|;
(5)摄像机坐标系相对于标定板坐标系的外参数矩阵标定误差σRci,σPci;
(6)机器人末端执行机构坐标系相对于世界坐标系的求取误差σRgi,σPgi。
因此,根据Tsai提出的误差影响公式,设计了如下的拍照位姿生成方案,如图2所示。以拍摄五张标定板图像为例,首先,在标定板几何中心的正上方 |Pc|距离处,放置一个参考坐标系{C0}。并使得{C0}的z轴指向标定板的几何中心。然后,在{C0}坐标系的xy轴平面,虚构一个外接圆半径为r的正五角星,正五角星的五个顶点即为拍照位置。至于五个拍照姿态,以如下方式设置:首先五个拍照点即是摄像机坐标系的原点,然后,令每个位置时,摄像机坐标系的z轴都指向标定板的几何中心;令第一个摄像机坐标系的x轴沿外接圆的切向方向,即图示的坐标系1,然后,虚构一个基准面,其定义为过正五角星一边,且垂直于{C0}的xy轴平面,即图示的基准面1,从而虚构一根旋转轴,其定义为过标定板几何中心,垂直于该基准面,即图示的基准轴1,由此,第二个摄像机坐标系设置为第一个坐标系沿该基准轴旋转到正五角星的一点,即图示的坐标系2。后续坐标系设置与此类似,就不赘述。
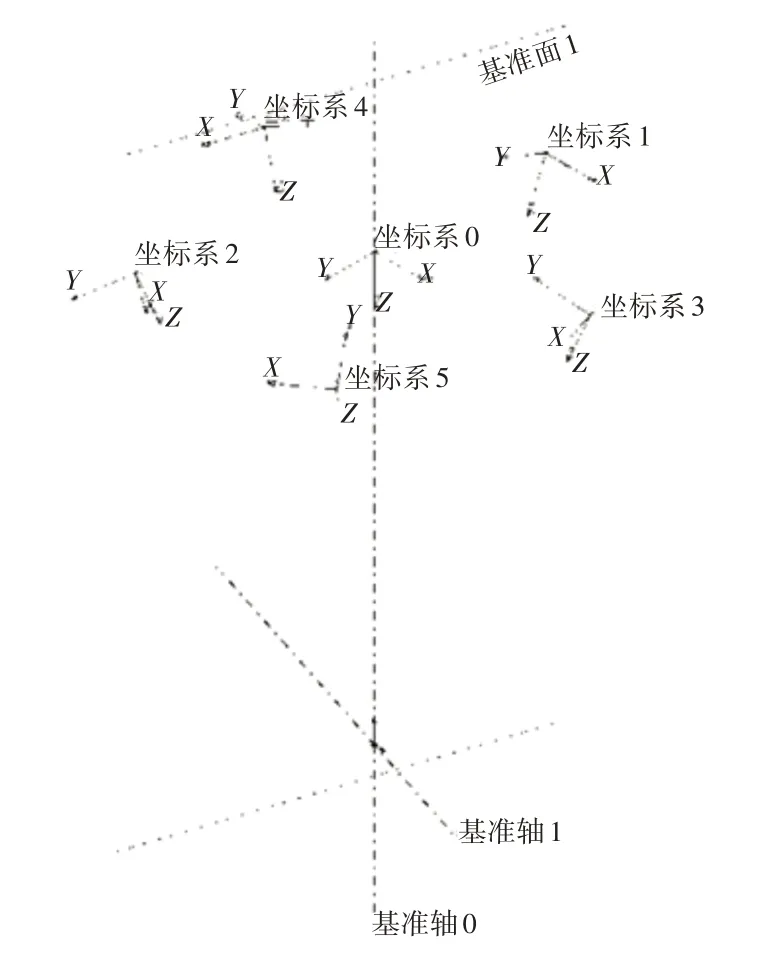
图2 拍照位姿生成方案Fig.2 Pose Generation Scheme
4 改进灰狼非线性优化算法
由Horaud在其论文中所述,由解析法得到的手眼标定矩阵,还可以通过以解析解为初始解,利用非线性优化算法进一步提高精度。这里提出的用于手眼标定的拍照位姿生成方案已使误差下降得很小了,利用传统的非线性优化算法容易陷入局部最小值而难以进一步优化。为此,这里提出一种用于手眼标定的DLHGWO-DE非线性优化算法。
灰狼算法是Mirjalili提出的一种通过模拟灰狼的社会等级和狩猎行为的智能种群优化算法[10]。该算法具有结构简单、参数设置少的优点,因而被广泛地用于寻优领域。但是该算法也和其他智能算法一样,存在收敛速度慢,容易陷入局部最优解等缺陷。为此,Mohammad于2020年提出一种结合维度学习的狩猎搜索策略的IGWO算法[11],有效提高了灰狼算法的全局搜索能力,但仍会出现较早收敛等缺陷。
为改进算法的寻优性能,这里将差分进化(DE)算法[12]和维度学习策略结合起来,提出一种更适合手眼标定矩阵优化的算法(DLH-GWO-DE),算法流程,如图3所示。
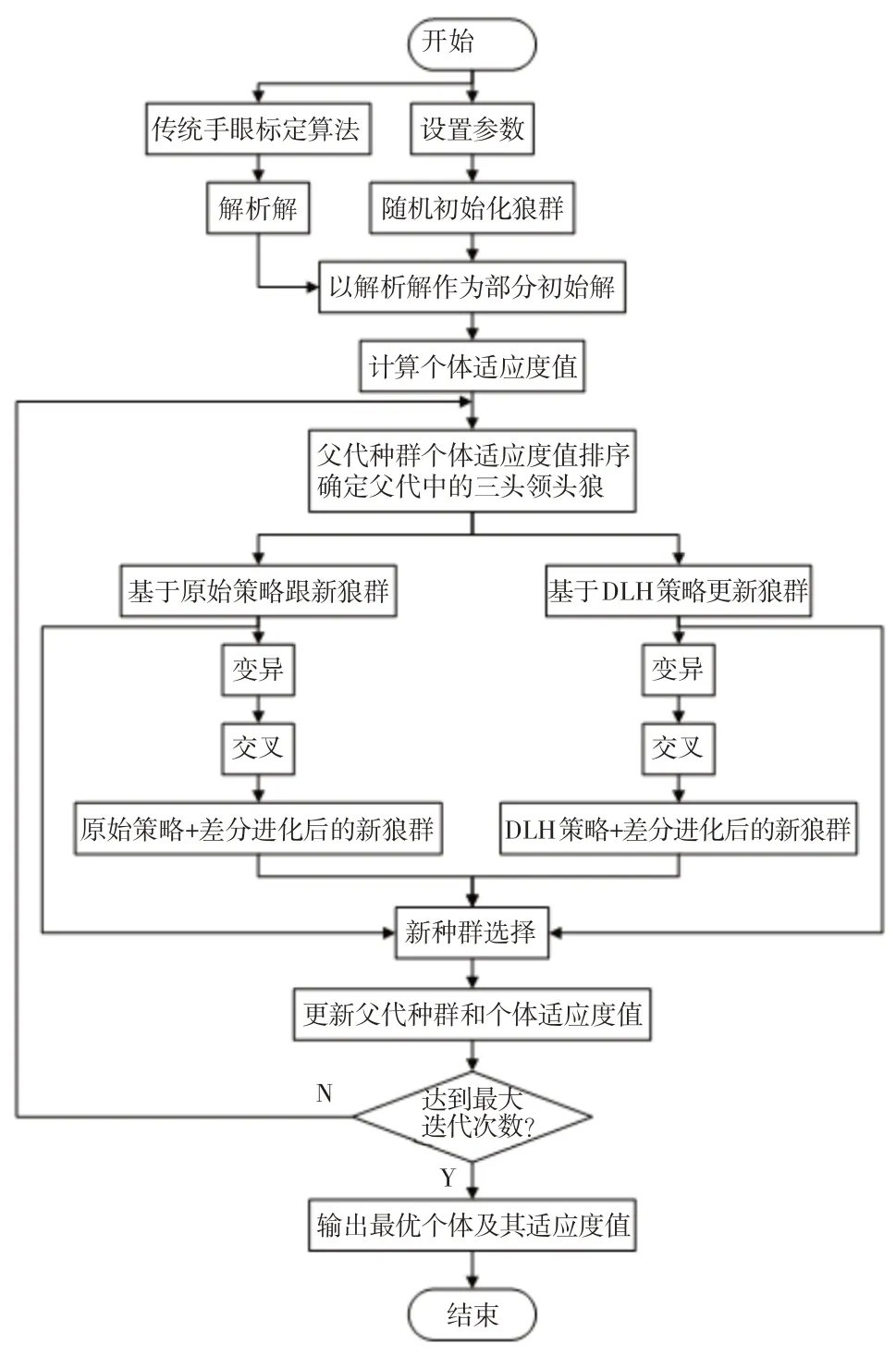
图3 DLH-GWO-DE算法流程图Fig.3 Flow Chart of DLH-GWO-DE Algorithm
设置目标函数,即适应度为:
DLH-GWO-DE算法包含初始化,移动,变异,交叉,选择,更新六个阶段。
4.1 初始化阶段
如果利用单位四元数替代旋转矩阵,则手眼标定矩阵可以变换成1×7的向量:
参考传统算法得出的解析解,设置搜索空间下界lb,上界ub。并产生N×7初始狼群:
最后用传统算法得出的解析解替代部分初始狼群。
4.2 移动阶段
移动阶段包含群体狩猎和维度学习。
群体狩猎即原始GWO搜索策略:前三个适应度最好的狼被认为是α,β,δ。然后利用公式计算新狼群:
维度学习即DLH搜索策略:新狼群由其邻域学习决定。首先,根据下式计算当前位置和候选位置之间的欧氏距离,以其作为半径Ri(t):
然后,由下式根据半径Ri(t)构造Xi(t)的领域Ni(t):
式中:Di—Xi(t)和Xj(t)之间的欧氏距离。
由此,DLH策略产生的新狼群为:
4.3 变异阶段
分别对原始策略产生的Xi-GWO狼群和DLH 策略产生的Xi-DLH狼群进行变异,变异阶段采用DE/best/1变异策略,即:
式中:Xp1,Xp2—从当前狼群中随机选择的两只不相同的灰狼,并且p1≠p2≠i;F—缩放比例因子,F∈[ 0,1]。
4.4 交叉阶段
交叉阶段可以增加狼群的多样性,分别对上步的两种变异狼群进行交叉操作,交叉操作如下:
式中:CR—交叉概率,CR∈[0,1]。
4.5 选择阶段
利用适应度对四种新狼群中的每个个体进行比较:(1)由原始策略产生Xi-GWO狼群;(2)由DLH 策略产生的Xi-DLH狼群;(3)变异交叉后的Vi-GWO狼群;(4)变异交叉后的Vi-DLH狼群。
4.6 更新阶段
利用适应度对新狼群X(t+1) 中的各个体进行比较:
5 实验分析
5.1 拍照位姿生成方案实验
实验1:对比随机拍照和根据拍照位姿生成方案拍照的手眼标定结果,其中方案一是移动机械臂末端到19个随机位置,拍摄标定板;方案二是利用拍照位姿生成方案在 |Pc|=380,r=60,N=19拍摄标定板。实验结果,如表1所示。
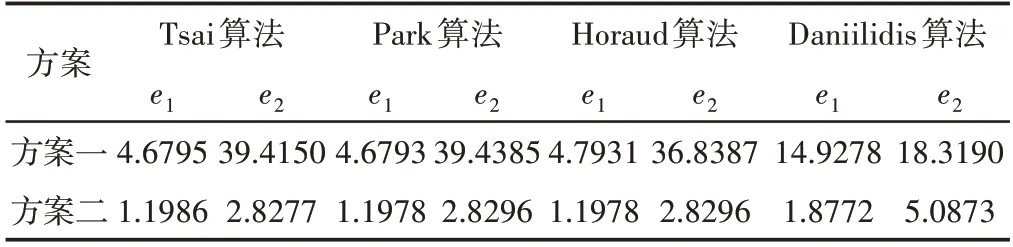
表1 实验1结果Tab.1 Results of Experiment 1单位:×10-3
由实验1可知,Tsai算法,Park算法,Horaud算法手眼标定结果相近,优于Daniilidis算法,拍照位姿生成方案比随机拍照旋转误差降低约74%,平移误差降低约92%。
实验2:控制变量 |Pc|=380,r=60,实验N对手眼标定误差的影响,实验结果,如图4所示。

图4 实验2结果Fig.4 Results of Experiment 2
由图4可知,在使用拍照位姿生成方案后,拍照张数N对误差的影响不明显,随着N的增加,误差仅少量降低。
实验3:控制变量 |Pc|=380,N=19,实验r对手眼标定误差的影响,实验结果,如图5所示。

图5 实验3结果Fig.5 Results of Experiment 3
由图5可知,随着r的增加,旋转误差增加,平移误差减小。
实验4:控制变量r=60,N=19,实验 |Pc|对手眼标定误差的影响,实验结果,如图6所示。
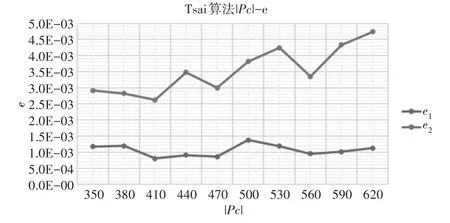
图6 实验4结果Fig.6 Results of Experiment 4
由图6可知,随着 |Pc|的增加,旋转误差变化不明显,平移误差增加。
5.2 非线性优化算法实验
以实验一中方案二经Tsai算法计算的手眼标定结果为初始值,利用DLH-GWO-DE算法进行非线性优化,可以得到的优化结果,如图7所示。由图7可知,提出的DLH-GWO-DE的手眼标定优化算法比IGWO算法寻优速度跟快,得到的结果更优。
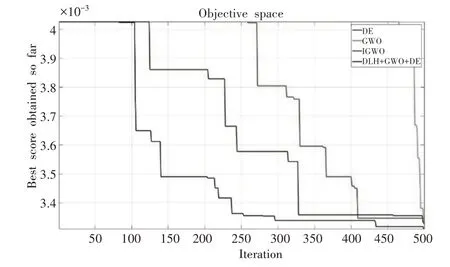
图7 优化结果Fig.7 Optimization Results
6 结语
针对眼在手的智能机器人视觉系统的手眼标定问题,这里提出了面向手眼标定的改进灰狼优化方法,利用拍照位姿生成方案设计手眼标定实验的摄像机拍照位姿,然后利用传统手眼标定算法求得手眼标定矩阵的解析解,最后,以解析解作为初始解,利用提出的DLH-GWO-DE 非线性优化算法迭代寻优,进一步降低手眼标定误差。通过实验可以得出该拍照位姿生成方案简便易操作,相比随机拍照,手眼标定旋转误差降低约74%,平移误差降低约92%。非线性优化算法相比传统算法,手眼标定误差进一步降低约19%。
