基于云平台集AI 图像识别的水果病虫害巡逻车
2024-01-23管嘉诚钟锦杰黄志芳吴波稼黄伟雄胡嘉辉
管嘉诚,钟锦杰,黄志芳,吴波稼,黄伟雄,胡嘉辉
(嘉应学院 物理与电子工程学院,广东 梅州 514015)
0 引 言
水果是我们日常生活中经常吃的食物,它的安全问题值得我们关注。在水果的种植过程中会受到各种外部因素的影响,比如农作物病虫害问题就是影响水果种植的一个很重要问题,每年因农作物病虫害造成的国民经济和农业生产损失十分严重。而目前对农作物病虫害的检测基本上都是通过人工识别和预防的方式,这种方式不仅效率低、耗时耗力,而且对检测员的专业能力要求极高。为了解决上述问题,并使检测效率更快以及防范农作物病虫害更及时,实现随时随地检测,本文专门设计一款基于云平台集AI 图像识别水果病虫害的巡逻车。
2022 年是实施“十四五”规划的关键之年,在当前我国经济从高速增长向高质量发展的重要阶段,以人工智能为代表的新一代信息技术,将成为我国“十四五”时期推动经济高质量发展、建设创新型国家,实现新型工业化、信息化、城镇化和农业现代化的重要技术保障和核心驱动力之一。人工智能能够助力乡村振兴打造数字经济新优势。基于云平台集AI 图像识别水果病虫害巡逻车能识别检测危害水果的严重病害,如苹果赤霉病、苹果黑腐病、樱桃(含酸味)白粉病、桃花菌斑、马铃薯早疫病和番茄菌斑病等,系统集机械结构、控制算法、图像识别技术、检测技术以及互联网技术于一体,使用了较为前沿的科技以及部分创新设计使其具有高效、网络化、智能控制化、自动化的特点,为解决农作物病虫害识别检测提供一种不错的方法选择。
1 整体设计方案
1.1 基本思路
本系统设计的水果病虫害自动识别检测和土壤湿度测量灌溉的巡逻车,是一套集深度学习、土壤湿度测量、水果病虫害识别、语音无线传输、语音播报、Web 网页控制、APP和从机监控等功能于一体的系统,用于检测水果发育是否正常,避免水果因错过最佳补救时间而引发严重经济损失的情况。
1.2 系统总体设计方案
(1)系统硬件采用了具有集成图像识别[1]的智能芯片Kendryte K210,以STM32F407ZGT6单片机为核心控制芯片。
(2)主机与从机之间通过2.4 GHz 模块实现无线通信,主机将数据信息显示在与主机连接的HMI 显示屏上并将数据信息发送给从机,从机也将数据显示在从机连接的HMI显示屏上。
(3)土壤湿度传感器模块实现测量土壤湿度是否正常的功能,若湿度不符合预先设定的值,将启动电池阀及其供水系统对水果进行灌溉补水。
(4)XFS5152 微型语音通信模块实现主机和从机远距离对讲通话功能。
(5)WiFi 模块与手机之间实现无线双向通信,手机端APP 通过发送指令对巡逻车进行运动控制,巡逻车负载了GPS 定位功能,实时了解巡逻车的动态。
(6)对于系统采集到的土壤湿度和环境温湿度等信息,系统除了使用手机APP 界面进行显示,还会在Web 网页端界面进行同步显示。对水果状态的自动检测和语音的自动提示都实现了智能播报。
(7)对果树的树叶进行扫描后,主机根据扫描的结果判断水果是否感染病虫害,并将结果发送到手机APP 和Web网页端。
系统的总体设计框图如图1 所示。
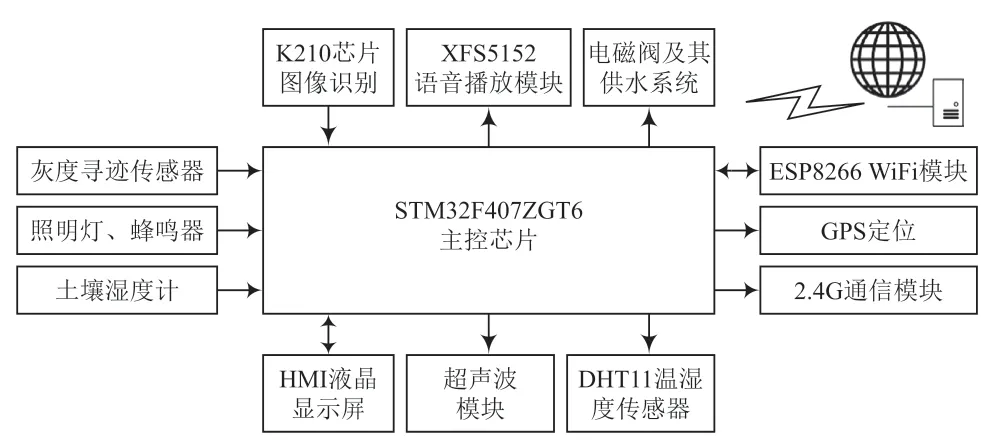
图1 系统总体设计框图
2 硬件设计
2.1 基于TensorFlow 深度学习框架的图像识别技术
目标检测是计算机视觉中一个非常重要的研究方向。目标检测与细分主要负责检测出图片中的物体。系统中使用的目标检测算法,结合了深度学习技术,代替传统的基于卷积滤波的方法,对识别的图片中树木的目标进行检测并细分。系统基于TensorFlow深度学习框架,TensorFlow是一个用于机器智能的开源软件库。本文采用了深度学习的较为经典的目标检测框架—YOLO2,精确识别水果是否患有病虫害[2],通过串口与STM32F407ZGT6 主芯片进行通信,原理如图2所示。
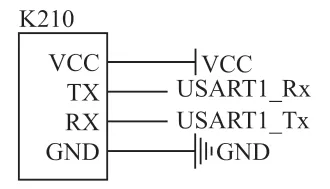
图2 K210 模块电路接线图
2.2 环境温湿度测量
系统采用DHT11 温湿度传感器对周围的环境进行测量[3],其湿度的测量范围为20%~95%,误差为±5%;温度的测量范围为0 ~50 ℃,误差为±2 ℃,符合系统的要求。通过对周围环境进行温湿度检测,可以为工作人员提供一个良好的出行、工作、防护条件;当湿度与温度不适合人们进行农作时,巡逻车会通过喇叭进行警报,通知现场的工作人员做好防护准备。DHT11 的数据脚与单片机相连,如图3 所示。
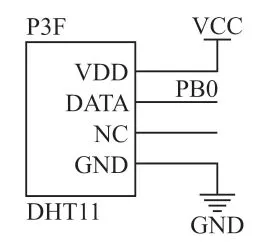
图3 DHT11 模块电路接线图
2.3 无线语音传输
系统使用XFS5152 无线语音传输模块[4],能有效传输工作人员的语音信息,便于工作人员对现场工作人员的引导,能远距离发出提醒的功能,便于人机交互。XFS5152 模块通过串口4 实现主机控制XFS5152 模块进行播报,VCC接3.3 V,GND 接GND。模块与主机芯片连接图如图4所示。
2.4 Web 端与APP 端控制
对于巡逻车工作的环境情况,可以将识别的图像信息通过WiFi 模块联网上云,并且可以通过手机APP 和Web 网页[5-6]进行监测与查看,手机APP 和Web 端能远程控制巡逻车的照明灯(照明灯用于在夜晚时提高摄像头的识别率)。无线的运用提高了工作人员对巡逻车的操控力度,使工作人员能及时应对突发情况,便于人机交互。ESP8266 WiFi[7]有5 个引脚,RX 引脚与主芯片的USART3_TX 相连接,TX 引脚与主芯片的USART3_RX 相连接,GND 引脚与主芯片的GND 引脚相连接。WiFi 模块接口如图5 所示。
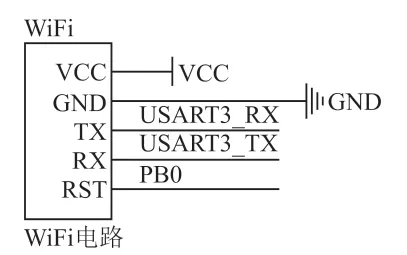
图5 WiFi 模块电路接线图
2.5 PID 算法控制灰度传感器、超声波寻迹避障与GPS 定位
运用PID 控制算法对小车的运动进行控制,并结合灰度传感器模块、超声波测距为小车设计切实可行的运行轨迹。灰度传感器模块的发射管会发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后将采集的数据传送至单片机,当巡逻车检测到前方或左右有障碍物时,能及时躲避,避免碰撞。同时,巡逻车利用超声波测量摄像头到果树的距离,计算出合适的识别距离;并在巡逻车上配备了GPS 定位模块[8],方便控制人员实时知道巡逻车的位置。如图6 所示为灰度传感器、HC-SR04 超声波传感测距模块和GPS 定位模块电路接线图。
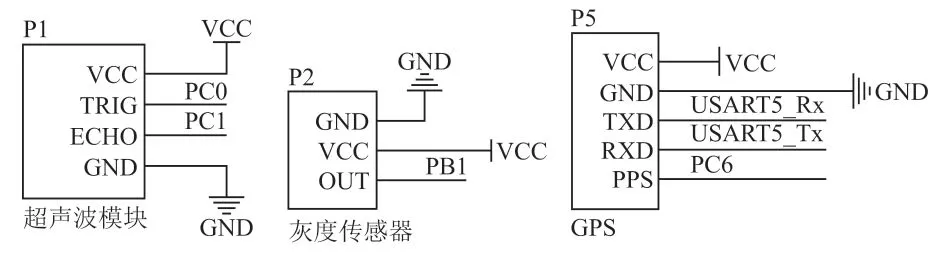
图6 避障寻迹测距定位电路接线图
2.6 土壤湿度测量与补水灌溉
系统使用土壤湿度传感器[9]对土壤的湿度进行检测,若所测湿度的结果与预先设定的湿度范围值不匹配的话,将进行灌溉补水的操作。土壤湿度传感器的电路接线图如图7所示。
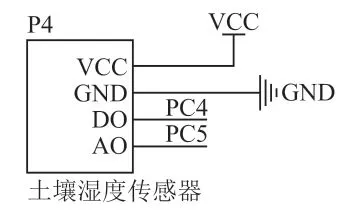
图7 土壤湿度传感器电路接线图
3 软件程序设计
3.1 图像识别+播报程序的实现
系统上电后,进入初始化。初始化后,指示灯闪烁,巡逻车开始根据预先设计的路线进行行驶,支撑机构上的舵机不断控制摄像头旋转,使其不断识别物体。当在路线行驶过程中识别到果树时,巡逻车会停下来继续识别果树的树叶,对其进行疾病判断并将所识别到的结果通过XFS5152 语音模块播放出来,假如苹果树叶正常,则播放“苹果正常”;如果苹果树叶得了赤霉病,则播放“苹果赤霉病”并通过蜂鸣器报警以提醒现场工作人员。主程序流程如图8 所示。
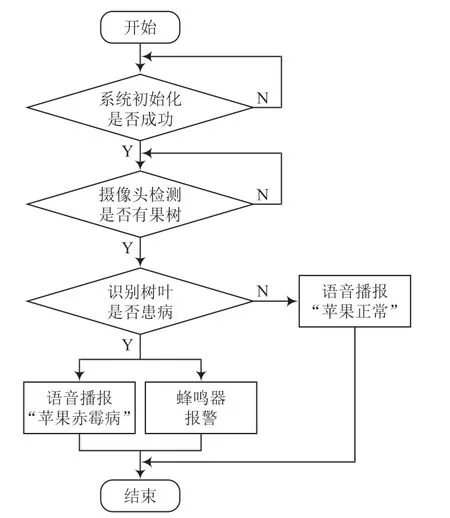
图8 图像识别程序流程
3.2 环境测温测湿程序的实现
系统的环境测温测湿功能的实现依靠DHT11 模块,DHT11 用的是单总线协议,一次传送40 位的数据。每次单片机读取DHT11 的数据时,都要一次性读取40 次,也就是读取40 位,并且数据前16 位是与湿度相关的,中间16 位是与温度相关的,最后8 位是用来校验的。当校验成功后,证明这一次的温湿度结果是正确的,单片机就可以使用这个温湿度值;如果校验不通过,那么就代表这次读取出来的温湿度值是错误的。环境测温测湿程序如图9 所示。

图9 环境测温测湿程序
3.3 WiFi 程序的实现
WiFi 模块中网络模块的主要作用是连接远程服务器、完成串口信号和无线信号的转换,保证微处理器的数据收发。通过ESP8266 的芯片可以使用AT 指令或者登录自带热点的网页进行配置,在连接建立之后将接收到的数据传递给MCU,从而建立通信连接,实现远程通信服务。具体工作流程如图10 所示。
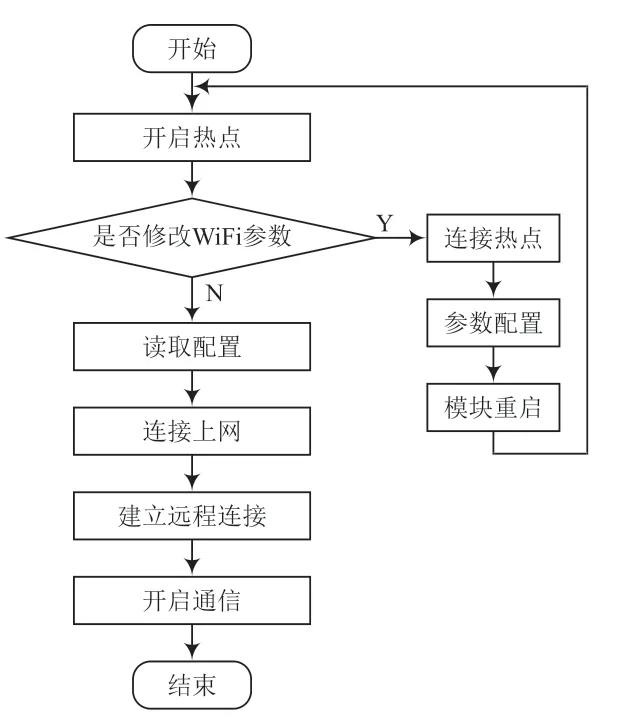
图10 网络模块工作流程
3.4 APP 或Web 端控制程序的实现
通过可视化编程工具node-red 进行网页的制作,并结合WiFi 模块接入MQTT 服务器进行数据的传输,从而实现Web 端对巡逻车的远程控制。通过微信小程序的框架与node-js 框架进行微信小程序的制作,并结合WiFi 模块接入MQTT 服务器进行数据的传输,从而实现APP 端对巡逻车的远程控制。普通状态下,系统实时发送温度等数据后,APP 或Web 实时接收各类数据并在界面上显示。当出现特殊情况时,可通过手机屏幕按键实现对巡逻车的操作控制[10]。其流程如图11 所示。

图11 APP 与Web 控制程序流程
3.5 避障寻迹测距定位程序的实现
避障寻迹测距定位程序的实现依靠三大模块与算法程序。灰度传感器利用不同颜色的检测面对光的反射程度不同、光敏电阻对不同检测面返回的光阻值也不同的原理进行颜色深浅检测。控制单元给超声波传感器10 μs 以上的触发信号,它的发射端就发射一束超声波,在发射的同时计时开始;发射出去的超声波在介质中传播,声波具有反射特性,当遇到障碍物时就会反射回来;当超声波的接收端接收到反射回来的超声波时,计时停止。GPS 模块通过MMCX 天线不断接收GPS 定位卫星发送的导航电文,通过GPS 模块(单片机)进行处理,并且输出串口TTL 电平信号与主AP 进行通信,传输NMEA-0183 格式的信息流;主CPU 处理NMEA-0183格式的定位信息、当前卫星信息、地面数字信息等卫星信息,按照一定的公式进行计算,经过应用逻辑处理后,返回给用户显示。其流程如图12 所示。
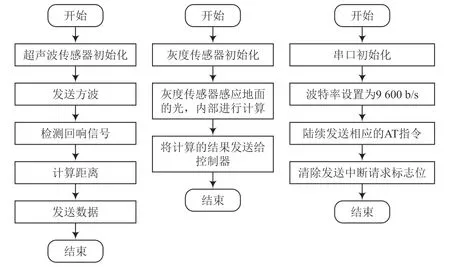
图12 避障寻迹测距定位程序流程
3.6 土壤湿度测量灌溉补水程序的实现
土壤湿度测量灌溉补水程序的实现依靠土壤湿度计与供水系统。巡逻车通过定点发射土壤湿度计,将其插入土里,湿度计测量土壤湿度,若湿度不在预先设定的合理范围内,则启动供水系统对其进行补水操作。具体流程如图13 所示。
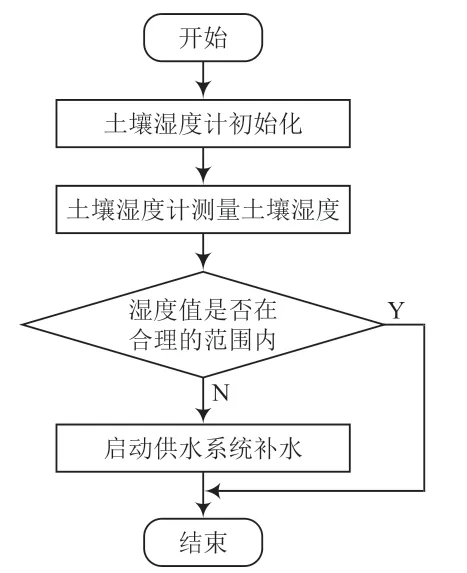
图13 土壤湿度测量灌溉补水控制程序流程
4 实验测试结果
图14 是巡逻车系统实物图,本系统采用图像识别芯片K210 及各类传感器采集相应信息并送入主控芯片,主控芯片STM32 系列单片机对数据进行处理后作出对应反应,从而实现检测水果病虫害的功能。图像识别芯片K210 负责检测水果是否患有病虫害的情况;土壤湿度传感器负责测量土壤的湿度情况,若所测湿度值不在预先所设定值的范围内,将启动电磁阀及其供水系统进行灌溉补水;XFS5152 微型语音通信模块实现主机与从机的远距离对话通信功能;超声波测距和红外寻迹模块结合系统预先规划的路线进行巡逻车障碍寻迹行驶;GPS 模块实现对巡逻车的定位;WiFi 模块实现数据传输,与云端Web、手机APP 之间进行通信,手机端或客户端通过发送指令对巡逻车的运动方向、灯和报警器等进行控制。图15 是APP 端图,图16 是Web 端图。表1 为水果病虫害的检测结果;表2 为手机APP 与主机的测试结果。
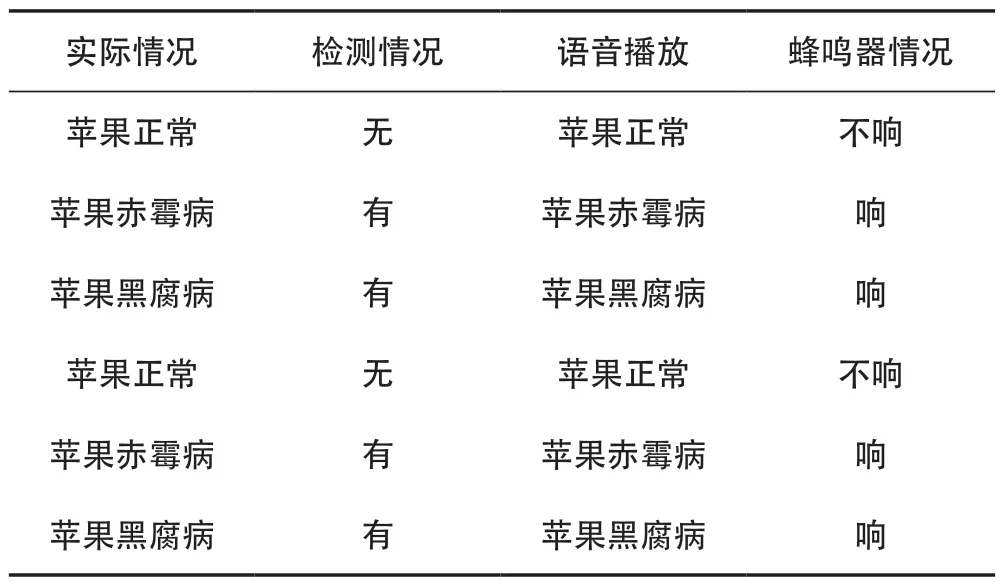
表1 正常水果与疾病水果的测试结果
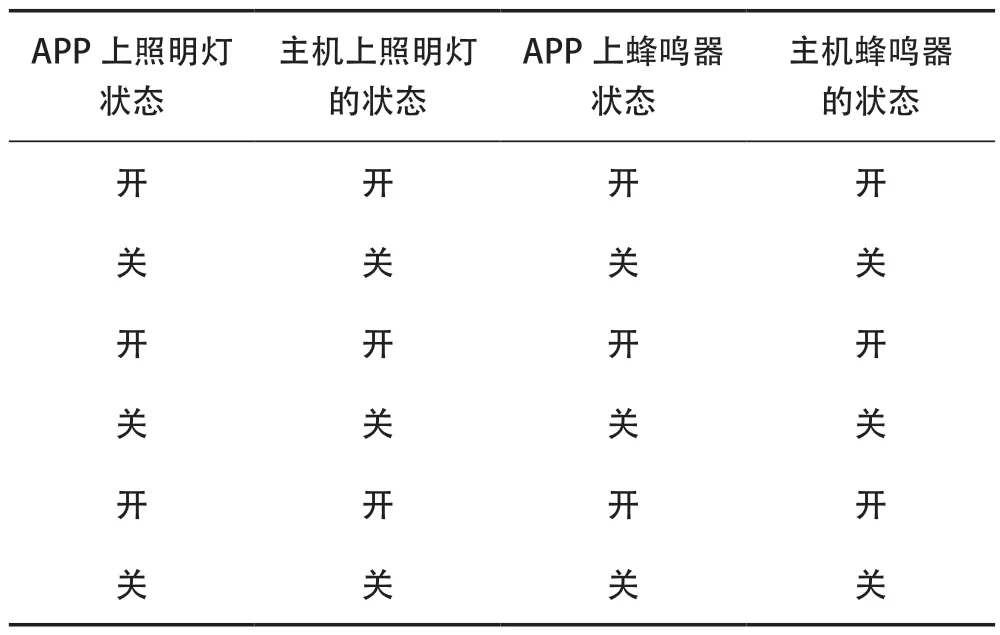
表2 手机APP 与主机的测试结果

图14 实物图

图15 APP 端
图16 Web 端
5 结 语
中国是一个农业大国,而农业收益一直深受病虫害影响。据统计数据,自2008—2017 年,我国农业有害生物年均发生面积达71 亿亩次。目前,市面上预防水果病虫害多数采用人工喷撒农药和专家实地考察的方式,效率较低。基于此,本文设计了一种基于图像识别水果病虫害的巡逻车,能有效识别水果是否感染常见病虫害的情况,具有土壤湿度检测和灌溉补水、语音提醒等功能,便于及时提醒种植者水果的状态;此外,还可通过Web 网页端和手机APP 的监控进行人机交互。本项目研究使得水果种植以及农作物病虫害识别检测更加智能化。
