基于系留放飞双模无人机的雷达标校方法研究
2023-12-11邾立志
苗 菁 李 归 姚 元 邾立志
(1.南京电子技术研究所 南京 210039)(2.南京理工大学计算机科学与工程学院 南京 210094)
1 引言
雷达对目标的测量精度是关系到其作战使用效能的核心指标。为了保证测量精度,须对测量误差进行修正。雷达测量误差包括随机误差和系统误差,其中随机误差与信噪比、多径、杂波等因素相关,一般不可消除;系统误差与安装误差、平台形变、机电轴误差及导航误差等相关,可通过标校将测量值与真值比对来进行修正[1~2]。
传统雷达标校方法主要有高塔标校[3]、卫星标校[4]和民航标校[5~6]等,在效率、适应性、机动性、通用性等方面存在不足。高塔标校需建设标校塔或专用移动标校车,成本高,组织标校活动不便;卫星标校受舰艇摇摆与卫星重返时间制约;基于民航广播式自动相关监视(ADS-B)系统的标校方法真值与雷达测量值时间对准困难,标定精度差。近年来,在全球卫星导航系统(GNSS)支持下进行标校的方法逐渐成熟[7],其与无人机平台结合,具有经济、快捷、可动态部署的特点,可有效解决上述问题,是雷达标校系统的重要发展方向。
GNSS 测量精度是准确标校雷达的基础[8],采用差分GPS(DGPS)技术[9]和RTK 技术[10]可将三维定位精度提高到厘米级。将高精度GNSS接收机放在无人机上,雷达跟踪该目标,获得固定翼无人机[11~12]或悬停无人机[13~14]定位数据和雷达测量数据后,进行坐标转换和数据处理,即可标定雷达系统误差。利用无人机对舰载雷达进行标校,还应从局部基准获取舰姿态修正值以克服舰船摇摆所带来的不利影响[15~16]。
本文提出了采用系留放飞双模多旋翼无人机平台结合空馈任务载荷、信号源、信标机和DGPS设备等构建标校系统的方法,对某舰载雷达进行波瓣图绘制和模拟运动目标标校场景下的射频链路进行分析计算,给出试验方案,并开展了相关验证工作。
2 系留放飞双模无人机标校系统的组成与原理
针对无人机标校在精度、稳定度、连续工作时间、特殊使用环境、载荷、可靠性等方面的较高要求,选用一种新型系留放飞双模无人机平台构建标校系统。该系统由双模无人机系统、空馈任务载荷、差分GPS 设备、信号源/信标机、无线数传设备等组成。
双模即“系留模式”加“放飞模式”,即同一无人机通过电源切换,实现系留和自由飞行两种工作状态。双模无人机系统由多旋翼无人飞行器、系留线缆及收放装置、供电系统、地面控制站等构成,其系留升限为300m,可长时间空中悬停,克服了常规无人机连续工作时间短(约30min)的问题。双模无人机可搭载各种任务设备,在不同场景下灵活选择多种作业模式,全天候、全天时地完成多种任务。双模无人机在断开复合光缆的情况下,可像常规无人机一样自由飞行。
无人机采用GPS 载波相位实时差分传输技术和高稳定飞控对无人机位置进行实时修正。通过利用DGPS、飞控、惯导、加速度计、陀螺仪、磁传感器、气压计等多种传感器数据,保证无人机位置姿态数据的平滑和稳定,满足雷达标校条件。
空馈任务载荷采用宽频带设计,主要用于L、S、C、X、Ku 波段的信号接收、放大及转发,其A 端、B端接高增益喇叭天线,原理框图如图2所示。
3 射频链路计算
3.1 天线波瓣图测试
利用双模无人机标校系统绘制天线波瓣图须开启上行链路:地面信号源/信标机产生连续波信号,经空馈任务载荷收发组件的发射通道放大后通过天线辐射至空间,被雷达接收,见图3。
图3 中,信号源天线发射功率为P,增益为G;空馈任务载荷A 端天线用于接收,有效孔径为AA,增益为GA,口面处能流密度为Sur,接收信号功率为Pur;空馈任务载荷B端发射天线增益为GB;信号源天线到空馈任务载荷A 端天线的距离为l;空馈组件增益为M;空馈任务载荷发射功率为Put;无人机平台到雷达的距离为R,雷达接收增益为Gr,雷达前端收到信号能流密度为Sr,功率为Pr。这些物理量存在以下关系:
综合式(1)~(6)得到
3.2 模拟目标测试
利用双模无人机标校系统模拟运动目标须开启下行链路:空馈任务载荷接收到雷达信号,转发给信标机(见图4)。信标机将信号延时、加多普勒频移后再通过上行链路转发给雷达。
图4中雷达发射功率为Pt,发射增益为Gt;无人机平台到雷达的距离为Rd;空馈任务载荷B 端天线用于接收,有效孔径为AB,增益为GB,口面处能流密度为Sdr,接收信号功率为Pdr,信标机天线有效孔径为As,雷达信号在信标机天线处的能流密度为Ss,输入信号功率为Pd。这些物理量存在以下关系:
综合式(8)~(13)可知
4 试验验证及分析
4.1 无人机悬停精度分析
波瓣图绘制过程中,需要无人机具有校高的悬停精度。
无人机采用GPS载波相位实时差分传输技术,无人机的位置信息实时发送到地面站并被记录,通过对无人机的GPS数据与基站GPS数据进行比对,得到无人机相对基站位置的偏离值,求其均方根误差(RMSE)以分析悬停稳定情况。
在2级到5级风速条件下试飞录取数据对悬停精度进行分析,结果表明双模无人机悬停水平和高度均方根误差不大于11cm,航向角、滚转角和俯仰角均方根误差不大于0.7°,此精度可满足一般雷达的标校需求。
试飞误差数据见表1。

表1 系留无人机悬停精度分析
其中,第一架次飞行数据见图5~图12。

图1 系留放飞双模无人机组成示意图
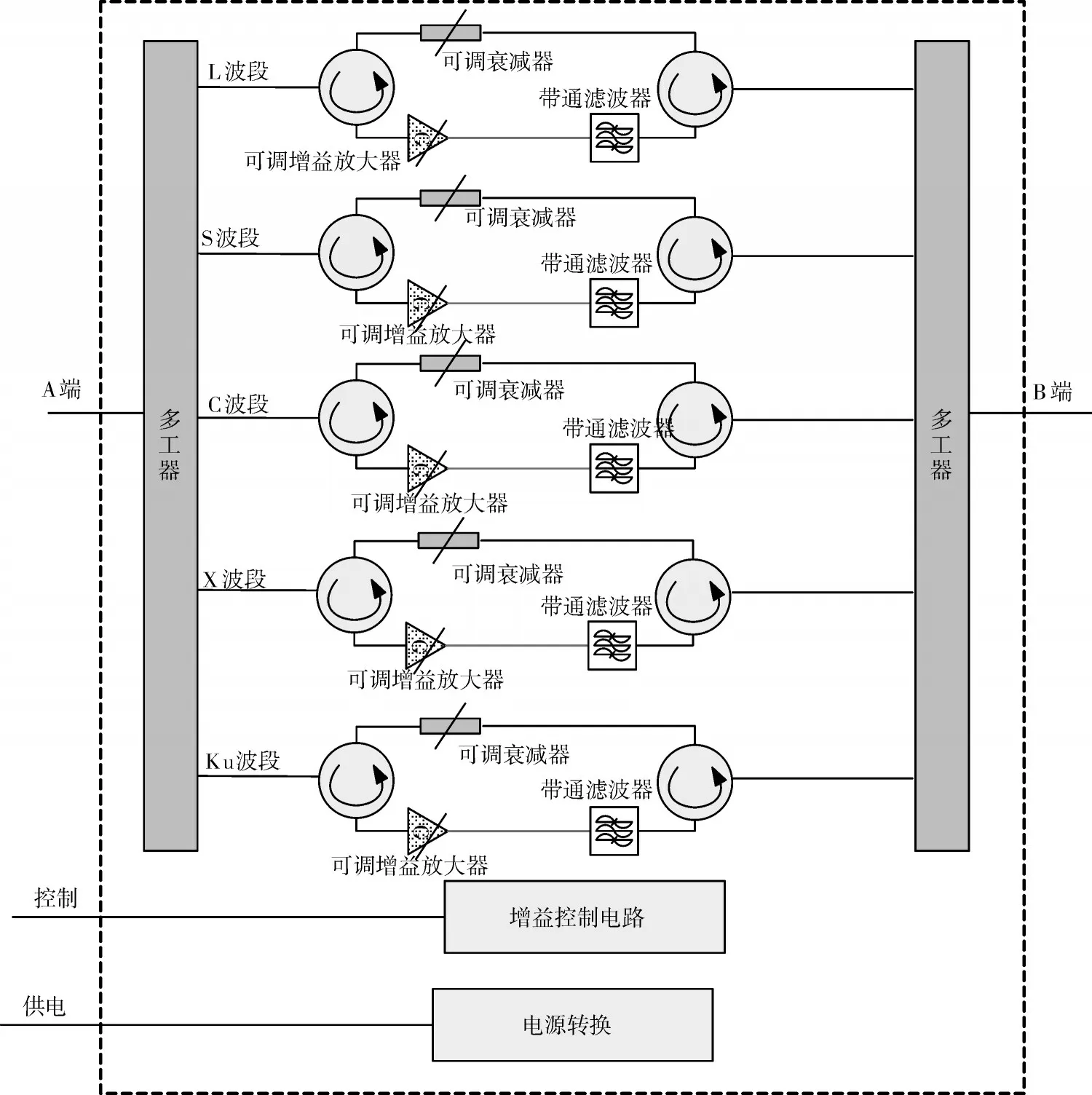
图2 空馈任务载荷原理框图
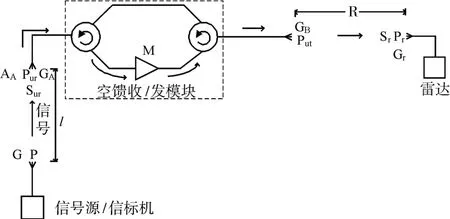
图3 上行链路信号流程图

图4 下行链路信号流程图
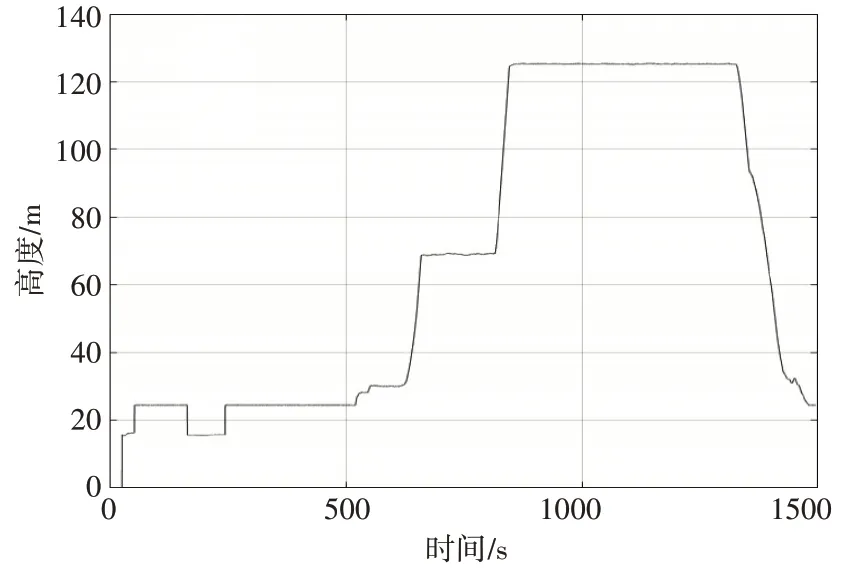
图5 飞行高度随时间变化图

图6 水平误差分布图(相对悬停中心)

图7 悬停时X向(向东)偏差随时间变化图
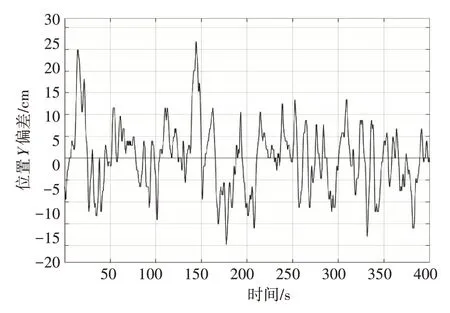
图8 悬停时Y向(向北)偏差随时间变化图

图9 悬停时Z向(向天顶)偏差随时间变化图

图10 悬停时航向角偏差随时间变化图
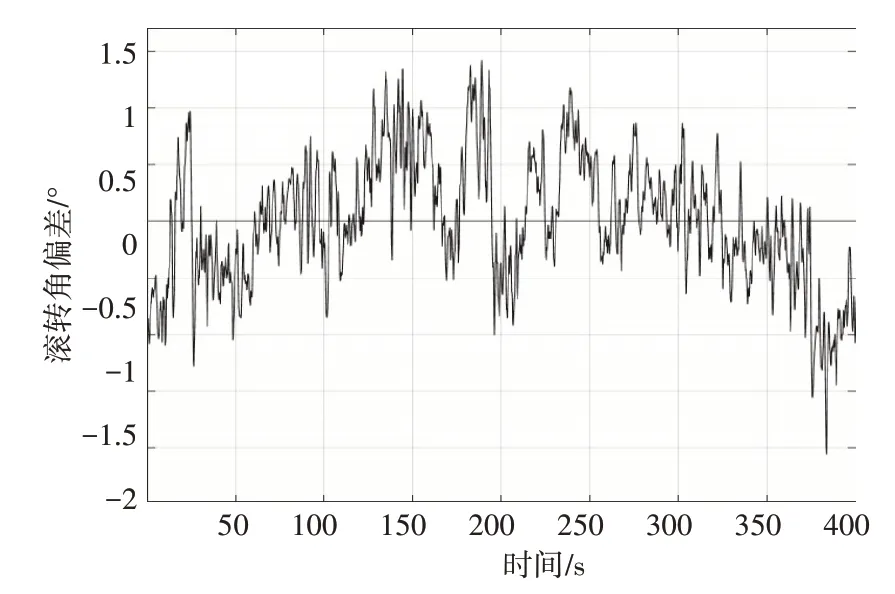
图11 悬停时滚转角偏差随时间变化图
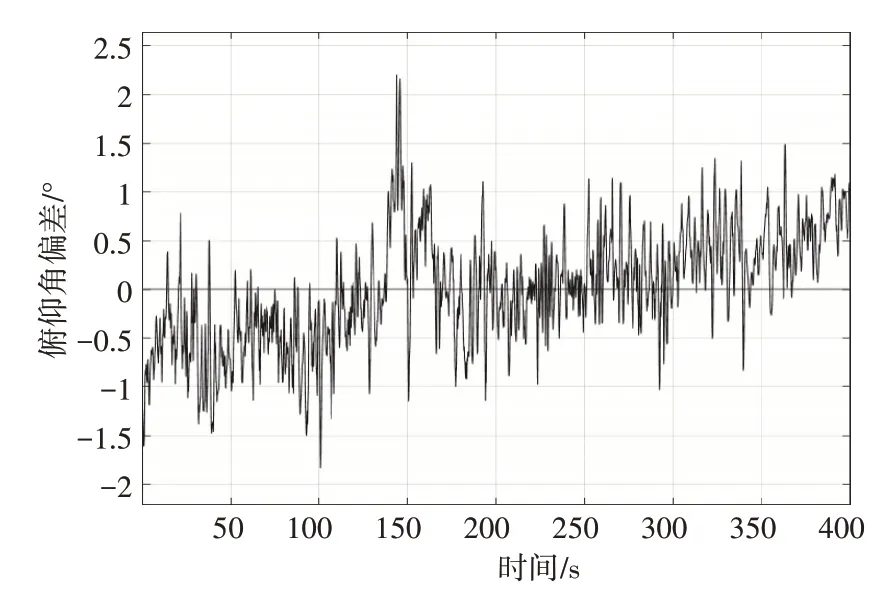
图12 悬停时俯仰角偏差随时间变化图
4.2 波瓣图绘制
被测雷达Gr=X1dB,工作波长λ=0.03m。标校系统信号源发射功率P=33dBm,G=13dB,空馈组件增益M=50dB,喇叭天线GA=GB=20dB,根据雷达周边环境,确定距离关系l=300m,R=1700m,则雷达前端收到信号功率为(X1-83)dBm,满足雷达绘制波瓣图的灵敏度要求。该场景下绘制的雷达接收和波束与方位差波束的波瓣图见图13。

图13 绘制的天线波瓣图
4.3 模拟运动目标标校
被测雷达Pt=X2dBm,Gt=X3dB,工作波长λ=0.03m。 标校系统Gs=13dB,GA=GB=20dB,L=2dB,根据雷达周边环境,确定距离关系l=200m,Rd=480m。该场景下Pd=(X2+X3-157)dBm,高于信标机的灵敏度(-50dBm),满足试验要求。对雷达进行标定,标定结果详见4.4节。
4.4 标校精度对比
按照有关规定,标校系统测量精度应优于被测雷达误差指标的1/3[17]。利用双模无人机对雷达进行标定,作为对照,同步采用全站仪和高塔棱镜进行标定,两者的标定结论均为:被测雷达方位与俯仰测角系统误差均为负偏差,且均在误差容限内(见表2)。无人机法与标校塔法相对偏差约为被测雷达误差指标的1/10,而全站仪和高塔棱镜检定精度优于被测雷达误差指标的1/10。因此无人机标校系统精度优于该雷达误差指标的1/5,满足该雷达标校需求。

表2 无人机法与标校塔法标校结果对比表
5 结语
基于双模无人机的标校系统具有以下特点:
1)标校形式灵活、动态、经济。可采用双模无人机搭载综合标校设备构建快速部署标校系统,部分替代利用标校塔、标校车、军机的传统标校方式。
2)空馈接力传输信号,兼容性好。信号源/信标机无需搭载升空,可选品种丰富,易于控制信号的延时、多普勒频移等参数,同时规避了这类设备受体积、重量、供电等因素限制难以搭载升空的问题。
3)支持多个不同频段的雷达同时标校、雷达与光电设备联合标校。搭载的综合标校设备采用宽频天线,可支持不同波段的雷达同时进行标校,也可支持雷达与光电设备联合标校。
4)系留和自由放飞两种工作模式,适合多种场景、多种环境条件下的雷达标校。
标校试验结果表明,双模无人机的悬停稳定精度高,射频链路计算准确,标校精度能够满足某舰载雷达的标校需求。
