基于深度学习算法实现锅炉水冷壁壁管缺陷识别
2023-12-09王伟刘川槐王建明王宝徐光平
王伟,刘川槐,王建明,王宝,徐光平
1.淮浙电力有限责任公司凤台发电分公司,安徽淮南,232131 2.北京中安吉泰科技有限公司,北京,100096
0 引言
锅炉水冷壁壁管在工业生产中扮演着至关重要的角色,用于传递热能,确保生产过程的稳定性和效率[1]。然而,由于长期高温、高压等因素的作用,壁管容易受到腐蚀、裂纹、疤痕等缺陷的影响,这些缺陷可能导致严重的安全问题和生产中断。因此,对壁管的及时监测和缺陷识别至关重要。传统的壁管缺陷识别方法通常依赖于人工检查和简单测量工具,存在主观性、耗时和效率低的问题。随着深度学习技术的飞速发展,可以利用其强大的特征学习和模式识别能力来改善壁管缺陷识别的准确性和自动化程度。深度学习算法可以从大量数据中学习有用的特征表示,助力缺陷识别[2]。
1 锅炉水冷壁壁管缺陷识别方法综述
1.1 深度学习算法概述
深度学习算法是一类机器学习方法,其核心特点是通过多层神经网络进行特征学习和模式识别。这些算法已经在许多领域取得了显著的成果,包括图像识别、自然语言处理、语音识别等。
(1)神经网络结构:深度学习算法通常采用深层神经网络。这些网络包含多个神经网络层,包括输入层、隐藏层和输出层。每一层都包含多个神经元,它们通过权重连接进行信息传递和特征提取。
(2)特征学习:深度学习的一个关键优势是它可以自动学习特征。传统机器学习方法通常需要手动设计特征,而深度学习可以从原始数据中学习有用的特征表示。
(3)前向传播:深度学习网络通过前向传播算法进行训练和预测。在训练过程中,输入数据通过网络的各层,经过一系列线性变换和非线性激活函数的处理,最终产生输出。
(4)反向传播:深度学习的训练通常使用反向传播算法。该算法通过计算损失函数的梯度,然后利用梯度下降等优化算法来更新网络的权重,以最小化损失函数。
(5)卷积神经网络(CNNs):用于图像处理的一种深度学习架构,具有卷积层和池化层,能够有效地捕捉图像中的局部特征。
(6)循环神经网络(RNNs):用于处理序列数据的深度学习结构,具有循环连接,适用于自然语言处理和时间序列分析。
深度学习算法是一类强大的机器学习方法,已经在多个领域取得了突破性的成果,但它也面临着一些挑战,需要不断地研究和改进。深度学习需要大量的数据和计算资源,容易过拟合,对超参数敏感,且解释性较差。解决这些挑战是深度学习研究的重要方向之一。
1.2 深度学习在锅炉水冷壁壁管缺陷识别中的应用
(1)图像识别:使用卷积神经网络来自动识别壁管表面的缺陷,如裂纹、腐蚀、疤痕等。深度学习可以学习特定缺陷的特征表示,从而提高识别准确性。
(2)红外热像仪图像分析:深度学习可以用于分析红外热像仪捕获的图像,以检测壁管的热异常或温度分布不均匀,这可能是壁管内部缺陷的迹象。
(3)声音分析:深度学习可以用于分析壁管敲击棒产生的声音信号,以识别声音特征与不同类型缺陷之间的关联,从而实现自动缺陷识别。
(4)超声波检测:利用深度学习处理超声波数据,可以更准确地识别壁管内部的裂纹、腐蚀等缺陷,同时降低误报率。
(5)数据融合:将不同传感器(如图像、声音、超声波)捕获的信息融合到一个深度学习模型中,可以提高缺陷识别的综合性能。
(6)实时监测:深度学习模型可以实时监测壁管的状态,并在检测到异常时触发警报,有助于及早发现问题并采取必要的维修措施,以防止事故发生。
需要指出的是,深度学习在锅炉水冷壁壁管缺陷识别中的应用需要大量的标记数据进行训练,并且需要针对具体的问题进行模型设计和优化。此外,模型的可解释性仍然是一个挑战,因此在实际应用中可能需要考虑如何解释模型的决策结果。尽管如此,深度学习的强大特性使其成为改进和自动化缺陷识别的有力工具。
2 深度学习模型设计与实现
本章基于深度学习算法建立了锅炉水冷壁缺陷目标检测模型。通过使用Faster R-CNN、SSD、YOLOv5等目标检测算法,建立了一个锅炉水冷壁壁管缺陷目标检测数据集。然后,采用迁移学习的方法,在建立的锅炉水冷壁壁管缺陷目标检测数据集上训练了目标检测模型,通过对不同模型的结果数据进行对比,得出适用于锅炉水冷壁壁管缺陷检测的最佳模型。
2.1 Faster R-CNN深度学习框架
Faster R-CNN是一种用于物体检测的深度学习框架,可以应用于锅炉水冷壁壁管缺陷识别中。它结合了深度学习中的特征提取网络和区域建议网络,以实现准确和高效的缺陷检测。Faster R-CNN的网络结构如图1所示,主要设计流程如下。
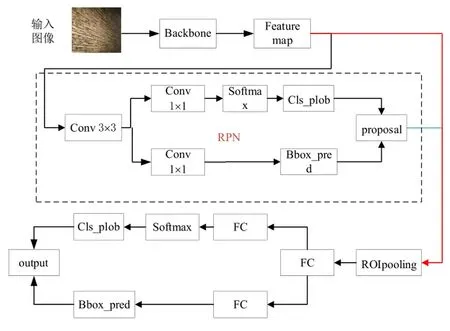
图1 Faster R-CNN 网络结构
2.1.1 特征提取
Faster R-CNN使用预训练的深度卷积神经网络(如VGGNet、ResNet等)作为特征提取器。输入图像通过卷积层和池化层等操作,提取出图像的高级特征表示[3]。
2.1.2 提案生成
在特征图上运行RPN,生成候选目标框。RPN通过滑动窗口的方式在特征图上移动,并为不同尺度和长宽比的锚点生成参考框,利用卷积操作对每个锚点进行分类和回归得分;根据得分,选取具有高置信度的proposal。
2.1.3 区域分类与回归
选取一定数量的高质量proposal,将其输入到RoI Pooling层中,对每个proposal提取固定大小的特征向量;将特征向量输入到全连接层,进行目标分类和边界框回归;目标分类通过softmax等激活函数输出目标类别的概率;边界框回归对proposal的位置进行微调,使其更准确地匹配目标位置。
2.1.4 损失计算与训练
使用分类损失函数(如交叉熵损失)和回归损失函数(如平滑L1损失)对目标分类与回归的结果进行多任务优化;利用反向传播算法以及梯度下降等优化方法,根据损失函数的梯度更新网络参数[4];通过大量的训练样本和若干个训练迭代,不断优化网络参数,以提高锅炉水冷壁壁管缺陷识别性能。
Faster R-CNN框架的优点在于结合了区域建议和目标分类与回归的过程,使得目标检测更加准确和高效。通过共享卷积特征提取,提高了运行速度。而且,Faster R-CNN支持端到端的训练,使得整个模型可以一次性训练,简化了流程,并提高了模型的性能。
2.2 SSD检测模型
我们选用了以VGG16网络作为基础网络的SSD检测模型,这是一种用于实时目标检测的深度学习架构(见图2)。该模型的设计流程如下。

图2 SSD 网络结构
2.2.1 基础网络
使用预训练的VGG16模型作为基础网络。VGG16是一个经典的卷积神经网络,通常用于图像分类任务,非常适用于对锅炉水冷壁壁管缺陷信息进行分类。通常会截取VGG16的一部分作为基础网络,通常选择卷积层的一些部分,而不包括全连接层。这些卷积层将用于提取图像特征[5]。
2.2.2 附加卷积层
在VGG16的基础上,添加了额外的卷积层,用于进一步提取水冷壁壁管缺陷特征。这些附加卷积层有助于检测模型更好地理解目标的细节和上下文信息。
2.2.3 检测头
检测头是一系列卷积层,用于生成目标检测的边界框和类别置信度分数。通常包括多个检测头,每个头负责检测不同尺寸和长宽比的目标,每个检测头输出一组边界框和相应的类别分数,以识别缺陷图像中的目标。
2.2.4 特征图解码
检测头生成的边界框坐标通常是相对于特征图的,因此需要将它们解码为图像坐标。解码过程将特征图上的边界框坐标映射到原始图像上,以获取最终的目标检测结果。
2.2.5 非极大值抑制
为了消除冗余的检测框,通常使用NMS算法对检测结果进行后处理。NMS会保留最具置信度的目标框,同时删除重叠度高的框[6]。
2.2.6 训练和损失函数
模型需要进行监督式训练,其中需要使用带有标签的数据集,以便计算损失并通过反向传播进行权重更新。典型的损失函数包括目标边界框位置损失和类别分数损失,以确保模型能够准确地定位和分类缺陷信息。
基于VGG16的SSD检测模型结合了深度学习的卷积神经网络和目标检测的技术,允许在单个前向传播中检测多个目标,并且在许多实时计算机视觉应用中表现出良好的性能。这个模型的架构具有很高的灵活性,可以根据任务的要求进行修改和调整。
2.3 YOLOv5检测模型
YOLOv5目标检测算法是YOLO系列模型的第五代版本。它采用了一种单阶段的目标检测方法,通过单次前向传播将输入图像映射到边界框和类别概率(见图3)。YOLOv5的目标检测大致可以分为以下几个步骤。
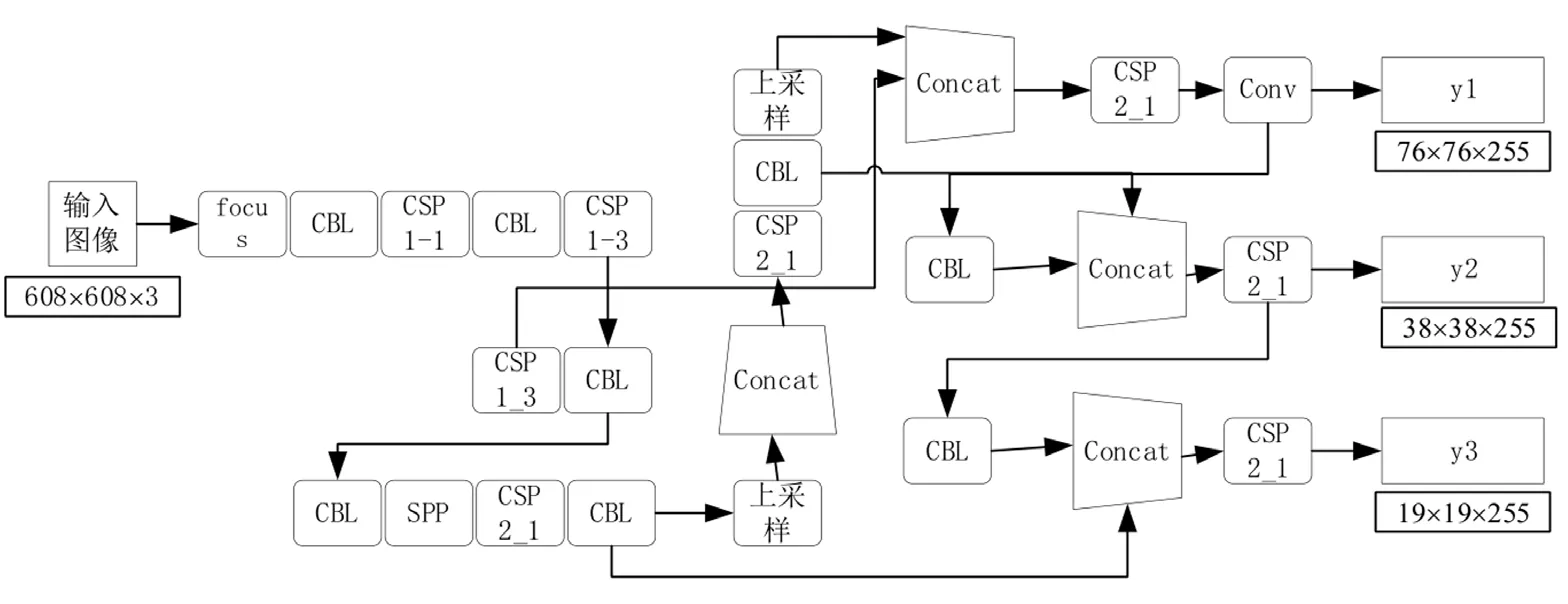
图3 YOLOv5 网络结构图
2.3.1 主干网络
首先,YOLOv5使用一个主干网络来提取图像的特征。这个网络通常基于卷积神经网络,如CSPDarknet53。主干网络将输入图像逐渐减小,并在每个级别上提取不同层次的特征表示[7]。
2.3.2 多尺度特征融合
YOLOv5通过使用不同分辨率的特征图来检测不同大小的目标。它使用一个特征金字塔结构,在不同的特征层级上进行融合,以获取多尺度的特征表示。
2.3.3 预测头
YOLOv5将每个融合后的特征图输入到预测头中。预测头由一系列的卷积层组成,并为每个检测类别生成边界框和类别置信度分数预测。对于每个预测特征图,预测头会通过卷积和全连接层来预测边界框的位置和类别。
2.3.4 锚框
YOLOv5使用预定义的锚框来处理不同大小和长宽比的目标。锚框是一组固定的边界框,用于在预测头输出的特征图上执行目标位置回归和类别预测。
2.3.5 非极大值抑制
与SSD模型一样,预测头输出的边界框通常会存在重叠的情况。YOLOv5使用非极大值抑制算法来删除冗余的边界框,保留概率最高的边界框,并过滤掉重叠度较高的边界框[8]。
YOLOv5通过主干网络提取锅炉水冷壁壁管缺陷特征,利用多尺度特征融合和预测头进行目标检测。其设计的目标是在保持一定准确性的前提下,提高速度和效率。同时,YOLOv5还具有可扩展性,可以通过调整网络结构和配置参数来适应不同的目标检测任务和资源要求。
3 缺陷识别结果分析
在锅炉水冷壁缺陷管目标检测数据集上检测精度最高的模型是Faster R-CNN模型,IOU设置为0.5时,mAP精度为98%,mAP(IOU=0.5:0.95)为76.8%。但是在高清分辨率视频上检测速度只有15.4FPS,Model_size为330M。YOLOv5模型检测精度IOU=0.5时,mAP为97.8%,mAP(IOU=0.5:0.95)为76.2%,比Faster R-CNN模型的检测精度略低,但是检测速度远远超过了Faster R-CNN模型,为45.4FPS,几乎是前者的三倍,Model_size为43.3M。SSD模型的检测精度在IOU为0.5时,mAP为90.8%,mAP(IOU=0.5:0.95)为63.5%,检测速度为36.2FPS,检测精度最低,检测速度也比YOLOv5模型慢,Model_size为108M。
4 结语
深度学习算法在锅炉水冷壁壁管缺陷识别中展现出了显著的潜力。通过使用深度学习算法模型,我们能够自动提取和学习壁管表面图像、声音信号和超声波数据中的关键特征,从而实现更准确的缺陷识别,可以为工程师提供一种更可靠、高效的壁管缺陷检测工具。然而,我们也要认识到深度学习算法在应用于锅炉水冷壁壁管缺陷识别中仍然面临一些挑战。首先,模型训练需要大量的标记数据,这在实际工程中可能会有一定难度。其次,模型的可解释性仍然需要进一步研究和改进,以便工程师能够理解模型的决策过程。
