基于检测机器人的燃烧器检测及健康分析
2023-12-09孟德彪李欢王宝徐光平张文强
孟德彪,李欢,王宝,徐光平,张文强
1.淮浙电力有限责任公司凤台发电分公司,安徽淮南,232131;2.北京中安吉泰科技有限公司,北京,100048
0 引言
在工业领域中,锅炉作为能源生产和加工的重要设备之一,在其运行过程中面临着诸多挑战和问题。其中,锅炉燃烧器作为锅炉的核心部件之一,其性能和运行状态直接关系到锅炉的燃烧效率和安全性。为了保证锅炉的正常运行和优化能源利用,对燃烧器的检测和维护工作变得尤为关键。
然而,在现实应用中,锅炉燃烧器吹灰孔的检测却是一个具有挑战性的任务。吹灰孔作为燃烧器的关键组成部分,用于排放燃烧过程中产生的灰渣,其清洁状态直接影响着锅炉的热效率和安全运行。然而,传统的吹灰孔检测方法常常面临着效率低下、人力高耗和操作风险大等问题。例如,需要在停机检修的环境下搭设脚手架、升降台,通过人工目视或手持照明工具进行检测,不仅操作复杂且存在一定的危险性,而且往往难以全面准确地检测各个吹灰孔的情况[1]。
为了克服传统吹灰孔检测方法的局限性,近年来,基于机器人技术的自动化检测装置逐渐引起了研究者们的关注。在这一背景下,本文旨在介绍一种新型的水冷壁检测机器人,该机器人采用基于六轴机械臂的设计,解决锅炉燃烧器吹灰孔的检测问题。机械臂检测模块包括高清摄像头和补光灯,通过线缆连接实现机械臂和检测器件的协同工作。同时,通过后台软件的远程遥控和图像查看功能,操作人员可以在安全的环境下对机器人进行遥控和监控,实现对吹灰孔的全方位、精准检测。
在本文中,将首先介绍锅炉燃烧器和吹灰孔的重要性,探讨传统吹灰孔检测方法存在的问题和挑战。随后,将详细描述基于六轴机械臂的水冷壁检测机器人的设计原理和构造,阐述机械臂、摄像头和补光灯之间的协同工作机制。进一步,将介绍后台软件的实现,包括远程遥控和图像查看功能的具体操作方式。最后,将通过实验分析验证本设计方案的有效性和可行性,以及对未来进一步优化和应用的展望。
1 方法
1.1 六轴机械臂控制
六轴机械臂可以通过正反解控制实现对机械臂的运动控制。机械臂可以按照指定的姿态移动,通过远程遥控实现控制。在本燃烧器缺陷视觉识别方法中,机械臂的六轴自由度被充分利用,可以自由地移动、旋转和调整机械臂的姿态,以便更好地观察和检测燃烧器的缺陷。
为了安装机械臂更快捷方便,节省作业时间,方便现场人员操作,在机械臂安装位置增加快装工装。如图1所示机械臂及快装工装安装后状态。
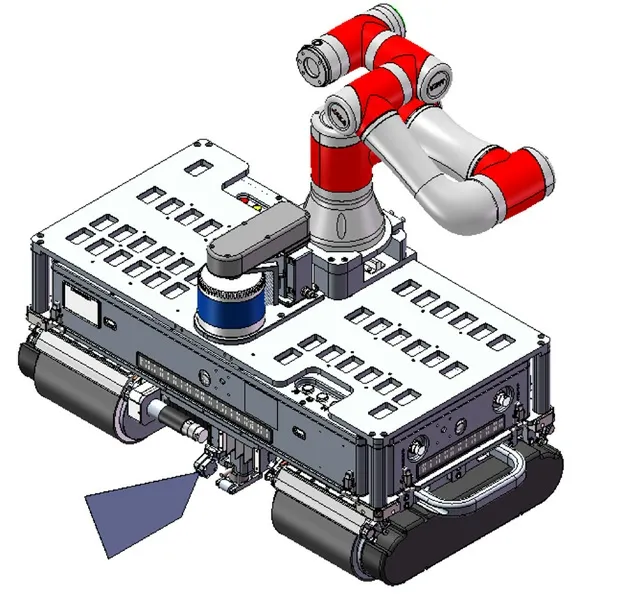
图1 机械臂及快装工装安装后状态
1.2 机械臂快装工装具体操作步骤
(1)将限位零件及弹簧锁安装在底座上,如图2所示。
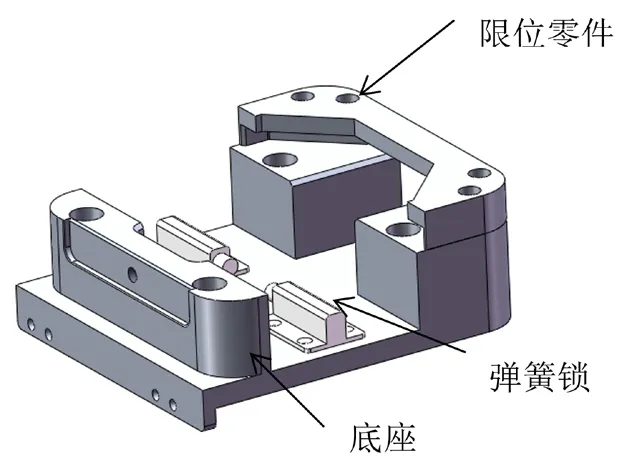
图2 限位零件及弹簧锁安装
(2)将装配好的底座安装到机器人本体连接板上,并用预留螺栓孔将底座紧定在机器人本体连接板上,如图3所示。
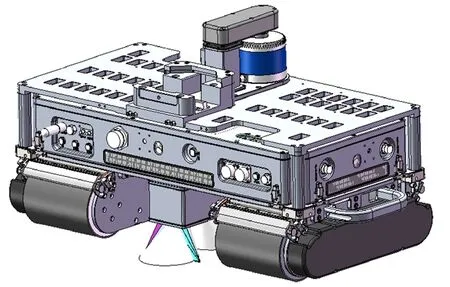
图3 机器人本体连接板快装
(3)将机械臂通过螺栓与安装板紧定,限位板安装在安装板预留位置并通过螺栓紧固,如图4与图5所示。
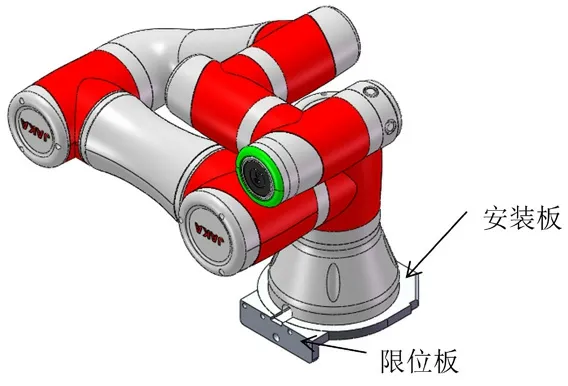
图4 安装板快装

图5 限位板快装
(4)将组装好的机械臂安装到底板上,限位板与底座限位凹槽配合,安装后将弹簧锁打开对限位板2起到阻挡作用,安装到位后将M8螺栓拧紧即可,机械臂安装全部完成。如图6及图7所示。

图6 机械臂连接件设计图

图7 机器人搭载机械臂效果图
1.3 高清摄像头和环形补光灯
本燃烧器缺陷视觉识别方法使用高清摄像头和环形补光灯来实现对燃烧器周围环境的观察和拍摄。高清摄像头可以拍摄高清晰度的图像,使得观察者可以更加清晰地观察燃烧器周围的环境和缺陷情况。而环形补光灯则可以提供均匀的光线,避免直射检测部位反光导致不清晰的情况出现,从而更加准确地识别燃烧器缺陷[2]。
1.4 软件功能实现
本燃烧器缺陷视觉识别方法的软件功能包括遥控器控制机械臂移动、遥控器控制补光灯开关、支持作业录像、回放下载导出、机械臂姿态监控等功能。这些功能的实现可以大大提高燃烧器缺陷识别的效率和准确性[3]。
2 实验结果
通过对多个燃烧器进行缺陷视觉识别实验,本燃烧器缺陷视觉识别方法的效果非常明显。通过使用高清摄像头和环形补光灯,观察者可以清晰地观察到燃烧器周围的环境和缺陷情况,而且机械臂的六轴自由度控制可以快速准确地移动机械臂,达到最佳的拍摄角度。此外,机械臂安装在永磁吸附爬壁机器人上,可以避免人工搭设升降台和爬行,更加高效和安全[4-5]。
3 结果与分析
本研究设计并实现了一个六轴机械臂搭载高清摄像头和补光灯的系统,可以通过人工远程遥控对燃烧器周围环境进行缺陷视觉识别,解决了传统人工检测方式低效、不安全、不准确的问题。
通过对实验数据的分析,我们得出了如下结论。机械臂控制方案的设计和实现具有较高的可行性和稳定性。搭载环形光源的补光灯可以有效避免直射检测部位反光导致不清晰的问题。机械臂姿态监控功能可以帮助远程操作者了解机械臂的状态,从而更好地掌控操作进程。通过作业录像、回放下载导出等功能,可以提高操作效率和数据管理的便捷性。
4 结论与展望
本文设计了一种用于水冷壁爬壁机器人搭载的基于机械臂的检测装置,用于燃烧器吹灰孔的视觉检测,其具有广阔的应用前景。随着工业自动化技术的不断发展,传统的人工检测方法将逐渐被自动化装置所取代。
首先,该装置可以显著提高检测效率。机械臂的自由度和精准控制使得吹灰孔检测可以更快速、全面地完成。相比传统人工检测,机械臂装置可以在短时间内对各个吹灰孔进行全方位的检测,大大提高了检测效率。
其次,该装置能够减少人力风险。在高温高压环境下进行吹灰孔检测存在一定的人身安全风险。机械臂装置可以避免人工进入危险环境,降低了操作人员的人身风险。
此外,该装置还能提高检测准确性。机械臂的精确控制和高清摄像头的应用使得吹灰孔的检测结果更加准确。装置可以捕捉到微小的缺陷和异常,有助于提前发现潜在问题,减少故障风险。
最后,后台软件的远程遥控和图像查看功能使得装置的使用更加灵活,操作人员可以在安全的位置进行装置的控制和监控。这使得装置的应用范围更广,可以在远程实时监控下进行检测和维护。
综上所述,基于机械臂的燃烧器吹灰孔检测装置为水冷壁检测提供了一种创新的解决方案。未来,随着技术的不断演进和应用的推广,这种装置有望在工业领域取得更广泛的应用,为锅炉设备的维护和运行贡献更多的价值。
