爬树杆机械手结构设计
2023-10-24郝时忠
郝时忠
(江苏省高淳中等专业学校,江苏 南京 211316)
0 引言
随着城乡一体化进程的升级,绿化树、电灯杆在大街小巷比较常见,国内针对绿化树、电灯杆等维修作业采用人工或者高空运载机进行检修和施工,已经适应不了现代城乡一体化进程发展的要求,主要表现在:绿化树、电灯杆在进行作业过程中人工风险较大,如采用市政高空机则会阻碍地下的交通,在一些特殊场合,即便采用了自动化机械手进行爬行,但是机械手的装置设计方案很局限,无法根据绿化树、电灯杆不同尺寸以及不同速度进行上下攀爬和传送工具,导致该攀爬设备的传送效率低下,而且传送相关绿化树攀爬机器人的PLC 系统控制系统依赖进口、手爪关节活动的寿命以及润滑等运行精度稳定性不足,使得绿化树、电灯杆自动上下攀爬机械手的装置的自动化程度以及精度无法满足不同直径和工况的绿化树、电灯杆的使用现状[1-2]。
当前许多学者针对爬树机械手通过理论和仿真实验[3],在传动形式、手腕关节、手爪自由度以及材料性能、摩擦磨损以及热处理方面进行了研究,所得成果应用到各大国家电网的维修部门,尤其是主要采用限元分析软件,分析其攀爬过程中存在的不足和缺点,建立手腕关节、手爪自由度的动力学仿真模型,模拟自动爬绿化树、电灯杆机器人不同路况或功率下的动力和传动效率,找出存在的风险因素并进行改进,能够降低自动爬绿化树、电灯杆机器人开发周期和费用[4]。
1 爬杆机器人方案设计
1.1 自动爬绿化树机器人方案设计
本设计的自动爬绿化树、电灯杆机器人根据仿生爬绿化树的现象,考虑的自动爬绿化树、电灯杆机器人的额定载荷为5 kg,能够在Φ120 ~Φ200 mm 的变径杆上爬行。设计的机器人采用两个手爪1,依靠盘形凸轮5 的运动轨迹带动连杆机构3 进行往复运动,在工作过程中一个手爪松开,一个夹紧进行爬行运动,在实现上下攀爬移动的进给夹紧载荷方面,下手抓通过弹簧4 收缩力提供预紧力使手抓收缩夹紧和松开直杆。如图1 所示。
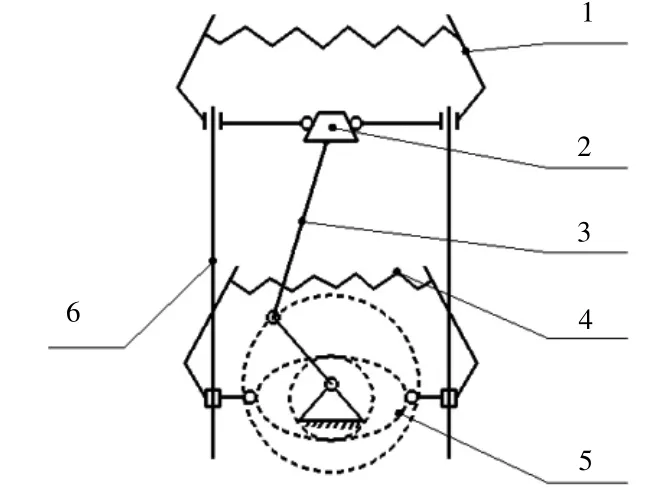
图1 爬杆机器人方案
1.2 夹紧装置设计
自动爬绿化树、电灯杆机器人的手爪的夹紧方案可以考虑电机驱动连杆往复运动,在机械手的工作过程中,考虑弹簧与传动连杆配合实现手爪开合的作用。在设计过程中还需要其具有自锁功能,确保了在开合过程中当自动爬绿化树、电灯杆机器人的手爪传动连杆与弹簧失效时不会下坠,此外传感器检测自动爬绿化树、电灯杆机器人的手爪的抓取压力信号,通过压力信号的识别可将正常夹紧与松开的工况的信息反馈给PLC 控制器,从而做出是否进行进给往复的目的,驱动自动爬绿化树、电灯杆机器人系统发出一系列的操作,而为了确保自动爬绿化树、电灯杆机器人夹紧装置在接触电杆过程中因为摩擦磨损导致的表面划伤,或者当负载载荷超过其额定重量时候,为了确定其抓紧力产生的摩擦系数,这里考虑采用橡胶垫块,在满足工况的前提下能够进行灵活的更换。如图2 所示。
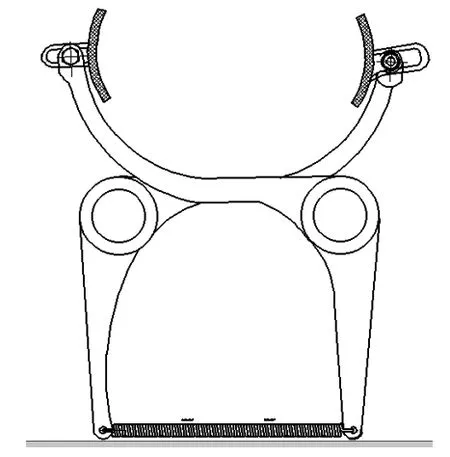
图2 夹紧装置
1.3 运动状态分析
设计的自动爬绿化树、电灯杆机器人长度L=260 mm,宽B= 150 mm,高度H= 430 mm,在初始状态下手爪夹紧直杆,上手爪在弹簧作用下松开。当压力信号将正常夹紧与松开的工况的信息反馈给PLC控制器时,电机通过减速箱连接带动曲柄运动,曲柄一起固定在下手爪处的两个盘形凸轮机构顺时钟转动,因此自动爬绿化树、电灯杆机器人运动状态的合理性对传动系统的运行精度有着重要的影响,盘形凸轮推动下机械臂想外摆动,机械手爪向外松开,手爪一方面需要满足结构功能性要求,另一方面还需要满足经济性,当盘形凸轮转过小半径的圆弧后,下方的手爪松开;同时移动凸轮向下运动,此时上方手爪夹紧直杆。
当自动爬绿化树下部的盘形凸轮转过最大半径的圆弧后,下机械手爪开始收缩,并夹紧;手爪和连杆在受力过程中,还承受夹紧力加载导致的弯矩。当移动凸轮向上运动走过空行程,在凸轮运动时,自动爬绿化树、电灯杆机器人的上机械手爪开始松开,在设计过程中需要对自动爬绿化树、电灯杆机器人的变形刚度进行考虑,避免在爬行进给过程中产生冲击振动和位移,同时需要对自动爬绿化树手臂等结构的管线预埋走向进行考虑。避免当曲柄和连杆拉直共线即滑块可到达的最大行程时因为连杆的极限位置造成管线的干涉。
2 攀爬机械手爪设计
本自动爬绿化树的手爪的抓取对象为绿化树以及电线杆,其接触面为圆柱体,在对手爪设计过程中,首先是满足其功能性,手臂手指特征、攀爬过程中的接触应力、攀爬速度等因素,同时还考虑一定的仿生学,其中手爪的重点在于手指的自由度,如混合并联的执行机构,采用伺服电机驱动的斜面杠杆式、采用往复直线运动的滑槽杠杆式等,此外还有应用在其他场所的丝杠螺母弹簧式,以及利用自身重力的结构形式抓取等。本设计考虑的自动爬绿化树、电灯杆机器人的额定载荷为5 kg,能够在Φ120 mm ~Φ200 mm的变径杆上爬行。
在尺寸设计过程中,自动爬绿化树的手爪的旋转中心跟直杆X方向长度为67 mm,Z方向长度为129 mm,橡胶块的厚度d= 5 mm,自动爬绿化树的手爪在工作过程中的摆动θ= 10°。手爪的厚度d= 10 mm。采用5032 的铝合金材料,如图3 所示。
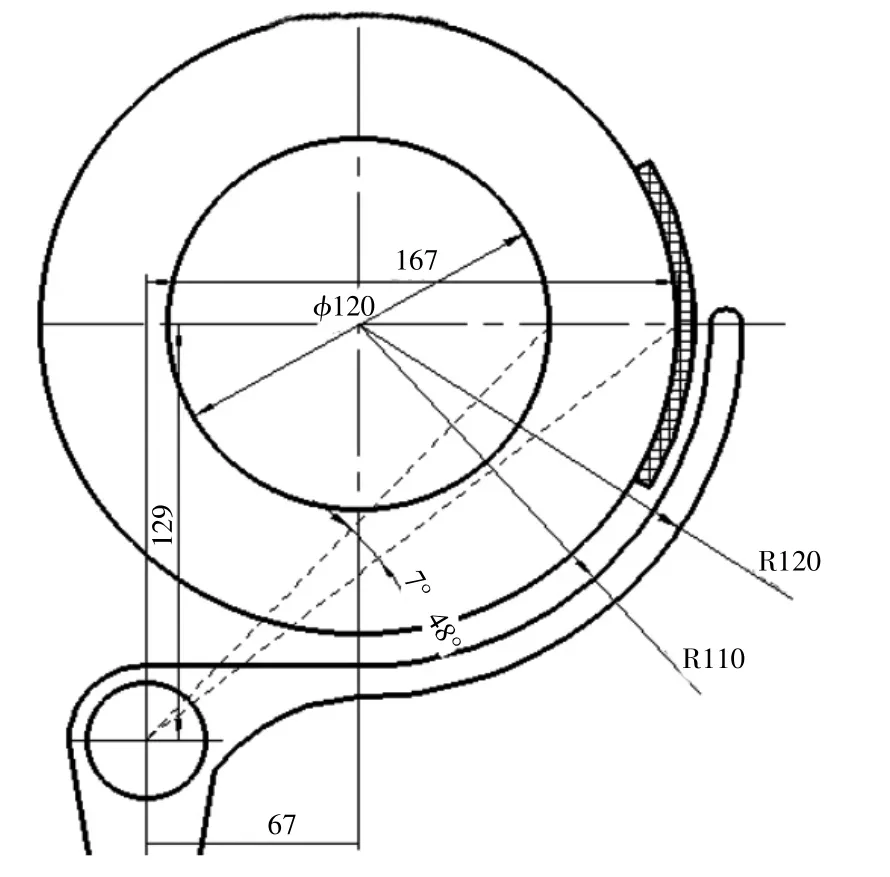
图3 机械手爪设计尺寸图
自动爬绿化树、电灯杆机器人的手爪驱动电动机的型号有许多,电动机的使用场合往往通过现场不同的负载类型来选型,本设计选择的型号为60YR25DV11的电机。该电机的标准参数见表1。

表1 60YR25DV11 电机参数
3 爬杆机器人三维建模设计
3.1 三维建模思路
自动爬杆机器人的主要部件包括上下机械手抓、弹簧、盘形凸轮、输入轴、曲柄机构的结构设计完成后,其设计的结构在功能上是否满足设计要求,还需要对其进行检查。一般来说采用三维软件建模可以直观形象的查看自动爬杆机器人设计的缺陷,同时方便后期的设计变更。随着当前机器人行业的飞速发展,基于CAD/CAE 计算的设计开始广泛应用,基于特征的三维建模技术对自动爬杆机器人的上下机械手抓右、弹簧、盘形凸轮、输入轴、曲柄机构建立完成后,可采用CAD 的辅助菜单对其尺寸联系、配合形式以及是否存在空间运动干涉进行检查,还可以采用CAE仿真分析软件对自动爬杆机器人受力过程中的结构动力学进行仿真,找到自动爬杆机器人传动过程中的失稳和变形干涉现象,还可以对单个部件的应力应变进行计算,为后期的部件优化提高理论依据,上下机械手抓右、弹簧、盘形凸轮、输入轴、曲柄机构之间的装配尺寸链和参数化关联都可以在三维建模器中进行显示,极大程度地降低了设计的周期。
3.2 主要部件的建模和运动仿真
3.2.1 运动仿真设置
采用UG 软件在对自动爬绿化树机器人进行三维建模,主要包括上下机械手抓、弹簧、盘形凸轮、输入轴、曲柄机构等,在建模过程中当某个特征之前发生变更时,如果相关部件在装配过程中存在配合约束,则相关的部件特征也会发生相应的更新,图4 为基于特征建立的自动爬杆机器人上下机械手抓结构装配。
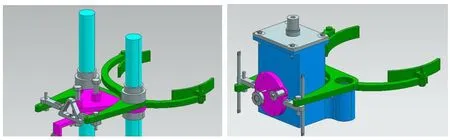
图4 自动爬杆机器人上下机械手抓
当创建完成自动爬杆机器人整体的三维模型后,为了验证自动爬电线杆机器人机构的设计合理性,需要采用运动仿真的形式进行仿真,尤其是装配约束,如盘形凸轮、输入轴之间的接触关系、尺寸和位置等,下面采用UG 软件进行仿真分析,对自动爬杆机器人进行运动仿真。
首先,选择自动爬杆机器人的立柱为固定连杆,其次,建立上下机械手抓旋转部件,创建运动副。定义自动爬杆机器人手抓、盘形凸轮和连杆等主要部件的运动副,创建完毕后点击“解算方案”,完成攀爬电线杆运动仿真的创建,得到图5 运动仿真设置分析。
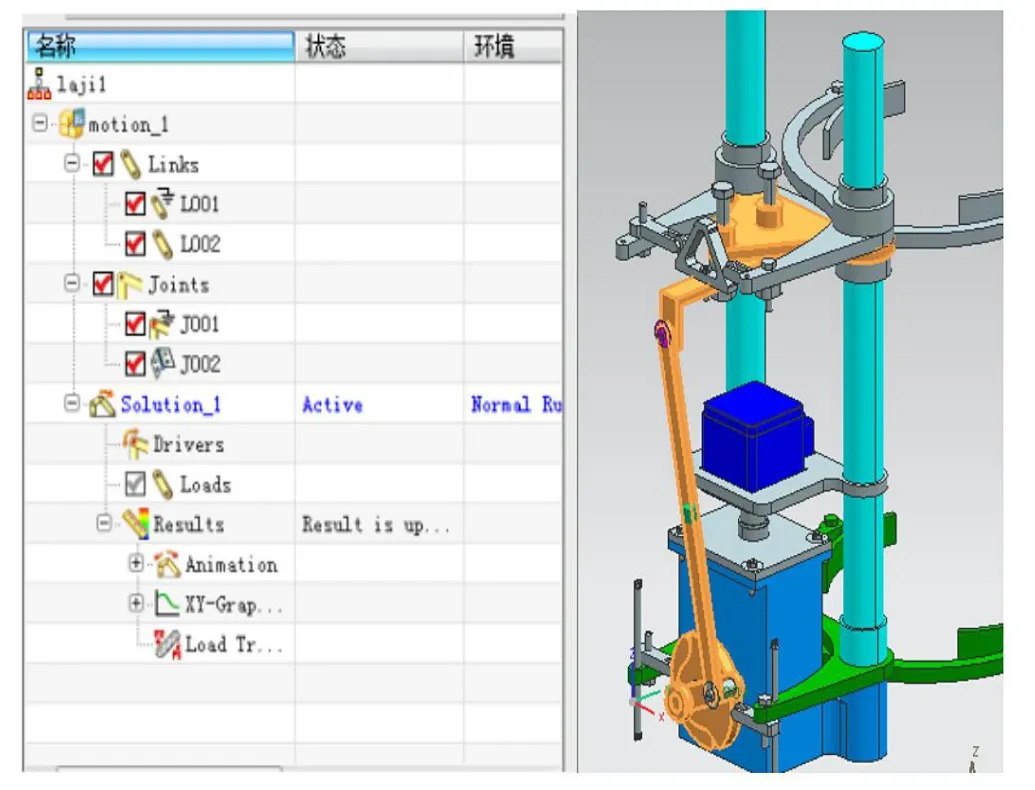
图5 自动爬杆机器人运动仿真设置分析
3.2.2 爬升运动过程
(1)首先爬杆机器人处于初始状态,该状态的下部夹爪处于抓紧、上部夹爪松开。上部夹爪的电机正转时,上手爪夹紧电线杆;反之当电机处于反转时,手爪松开。其爬杆动作示意如图6 所示。
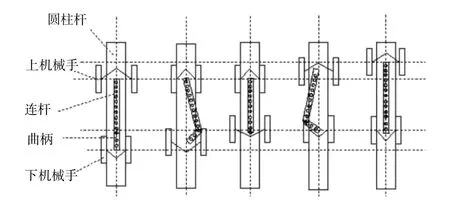
图6 爬杆动作示意图
(2)当图5 中的曲柄连杆控制电机,从0°转到180°时,下手爪向上攀爬行半个步距,实现预定的爬行高度h/2;持续时间为5 s;在爬行步态周期内,其爬行速度在半个步距范围内呈现非线性关系,其中在90°时,攀爬速度达到最大100 mm/s,如图7 所示,当控制电机旋转达到180°时,此时上下手爪的夹紧状态改变。曲柄连杆驱动电机从180° ~360°时,上手爪向上爬行半个步距,实现预定的爬行高度h/2。
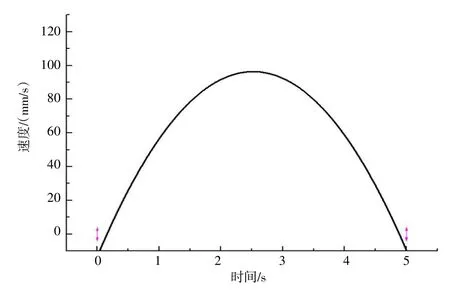
图7 下手爪0°~180°持续5s 的爬行速度曲线
(3)当驱动电机停止旋转时,上下爪处于夹紧状态,可实现高空悬停检修;当重复步骤1~2 时,爬杆机器人按照预定的速度进行攀爬,此时配备的清洁或者喷涂装置可实现对树杆或杆进行清洁或者防腐作业。当作业完成后,通过远端后台的操作改变电机的正反转顺序,可实现机器人的下降爬行。
4 结论
近年来针对在不同长度、不同直径、不同刚度的绿化树、电灯杆等的修剪和检修需求,除了满足功能结构外,手爪抓取电杆连接部件之间的结构强度、刚度需要较高的安全系数来抵挡极端冲击载荷的影响,以及避免攀爬过程中电力中断造成成机器人掉落地面。本设计的自动爬绿化树、电灯杆机器人根据仿生爬树的现象,考虑的自动爬绿化树、电灯杆机器人的额定载荷,设计的机器人采用两个手爪,依靠盘形凸轮的运动轨迹带动连杆机构进行往复运动,在工作过程中一个手爪松开,一个夹紧进行爬行运动,采用三维软件建立了爬电灯杆机器人的三维模型,并进行了运动仿真分析,能够查看设计缺陷和优化,显著降低了爬绿化树、电灯杆机器人开发周期和费用。