新型水果采摘装置的设计与研究
2023-10-24商益洋孙浩楠李世杰陈怡达孔祥睿
孙 强,雷 鸣,商益洋,孙浩楠,李世杰,陈怡达,许 诚,孔祥睿
(1.苏州城市学院,江苏 苏州 215104;2.苏州市计量测试院,江苏 苏州 215100;3.苏州建设交通高等职业技术学校,江苏 苏州 215104)
0 引言
收获采摘是果品生产中最为关键的过程之一。由于现代机械科学技术的迅速发展,更多的农业生产通过自动采集设备取代人类的苦力劳作。苹果自动采集装置就是近年来逐渐开发出来的一个新式采集装置。苹果采集装置始终是一个研究和开发的问题,在农业蓬勃发展的今天,大面积种植苹果,随之而来的是苹果的采摘问题,在较高的果树上结出的果实因无法摘到,造成苹果的摔落,因此这些苹果无法上市销售,无法实现经济价值,为解决高空采摘的困难,需要专用的苹果采摘机械手来解决此问题[1-2]。
1 国内外研究现状
国外对果园采摘机械的研究始于上世纪40 年代初,以美国、法国、英国为首的西方国家较早开展此方面的研究。到50 年代中期,利用振摇果树方式收获水果的采摘机械在欧美国家得到了发展和普遍应用。
近几年来,我国的收获机械发展很快,出现了很多收获设备、动力修剪收获设备、多功能果园作业机械等,它们的功能比较单一,效率不高,造成了很大的减产。
(1)我国大部分果园都采用分散栽培、分户管理方式,这导致农机和农艺的协调存在问题,很少有真正集中成片的大型现代化果园可以进行机械化作业。
(2)人工采摘时,胳膊容易被枝条刮伤、擦伤等,在高处工作时,甚至有可能摔倒[3-4]。
2 水果采摘器总体方案思路和工作流程
本次所研究的苹果采摘机械手是一种通用的水果采摘机械手,适用于批量或中、小批量采摘,可改变剪刀的角度及杆件的长度。适用于环境恶劣、劳动强度高、采摘危险性较高的场合。整体效果图如图1 所示。
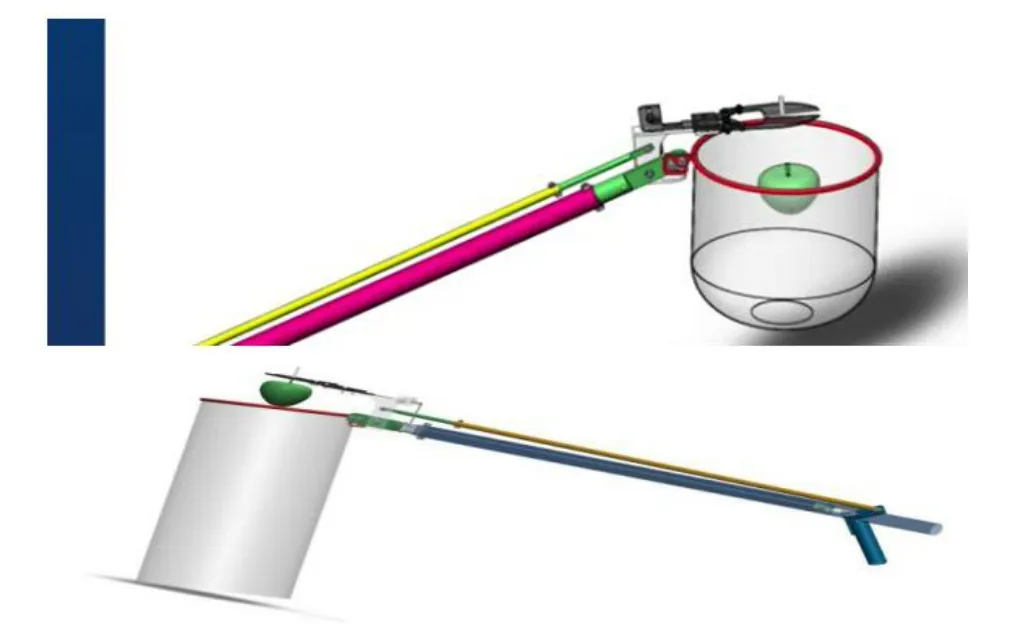
图1 水果采摘器整体效果图
2.1 水果采摘器总体方案思路
2.1.1 研究内容
(1)采摘器:在各个方向实现准确安全地采摘水果。
(2)接收传送装置:可以处理从高空掉落的水果,并将其采集到指定,果实从高处安全顺利的传送至地面。
(3)驱动装置:液压系统。
2.1.2 技术参数
(1)果树高度约3 m。
(2)采摘水果是球形的,D为直径,3 cm≤D≤10 cm。
2.2 工作流程
首先利用无极伸缩杆将采摘器的机械爪头送至水果附近,稳紧把手,利用液压系统去驱动机械剪刀剪水果根蒂;当水果根蒂达到剪切值时,水果会向下落,完成水果的采摘后,收传送装置会将其采集到指定,果实从高处安全顺利的传送至地面完成整个水果的采摘到接收的过程[5-6],采摘过程如图2 所示。

图2 采摘器工作流程
3 主要设计
3.1 采摘器采摘方式的选择
可以根据原理,采摘机构的设计可分为剪切式、抓拉式、吸附式等类型,各种不同工作原理的采摘机构特点如表1 所示。
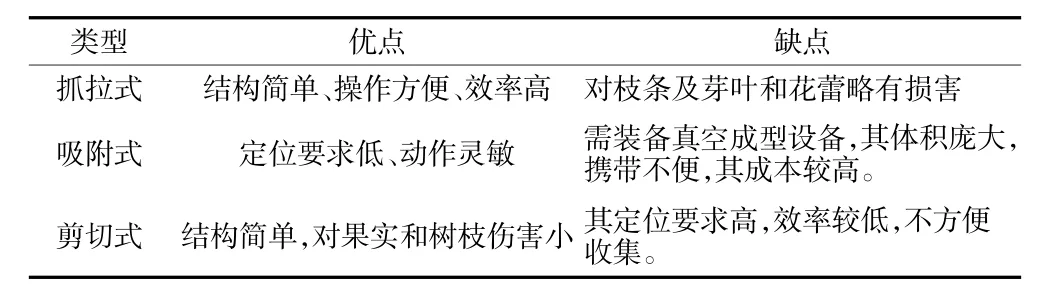
表1 各类不同工作原理的采摘机构及特点
不同类型的采摘器各有优缺点。吸收式虽有定位精度高、动作灵敏等优点,但需配有真空成形设备,且对果枝有很大伤害;抓取式结构简单,操作简便,但对果枝的损伤较大;剪切型结构简单,操作简便,对果枝损伤极少,但对位置的要求较高。所以,选用剪裁作用原理进行果实采收最为适宜,且操作平稳。在驱动力模式上,机械结构虽然简单,但作业时,不能节省人力,造成采收效率低下。水力采收省力,采收速度快,但制作费用较高。风力机整体重量轻,无污染,具有丰富的能源,但是它的结构和风力机的工艺都比较复杂。所以,最适宜的方法就是使用液压传动,操作简单、方便快捷。
因此,最佳的采摘机应该是液压剪切机,它结构简单,操作简便,对果枝和果穗的损伤较少,并且可以减少劳力。可调节的角度设计,使果实在任何一个角度都能安全可靠的采摘。
3.1.1 果实采摘过程受力分析
果柄受力分析,如图3 所示。
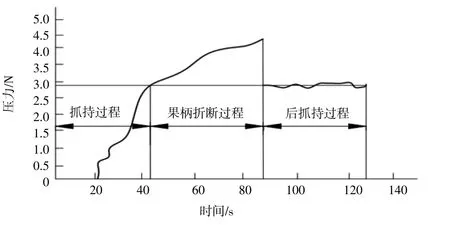
图3 果柄受力分析图
3.1.2 采摘结果分析
终端执行机构就是利用这个空隙,成功地将相邻的水果分开。相邻果实的分离成功率100%。果梗部位可见明显的离层维管束,其结构与前面描述的一样,在果柄附近呈束状分布。造成这种现象的原因可能是由于不同品种间的不同,有的品种尚未完全成熟,而未成熟品种的果柄需要更大的分离力。另外,由于果柄的长度、大小等因素的差异,使得终端执行机构在转动或脱离时,其转动或脱离的惯性轴线的角度也会不同,若终端执行机构在果实后方与果实的惯性轴线的角度过大,则果柄离层更多的是受牵引力而非剪应力的作用,从而增加了果柄保水果传送顺畅。剪断效果图如图4 所示。
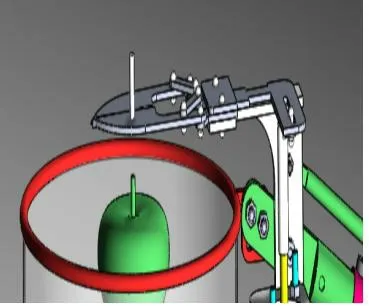
图4 剪断效果图
3.2 液压系统
3.2.1 液压系统的组成
液压系统作为传递动力装置,它由2 个小液压缸件1 和件4,2 个活塞件2,油液3,软油管,油杯,复位弹簧等部分组成,如图5 所示。
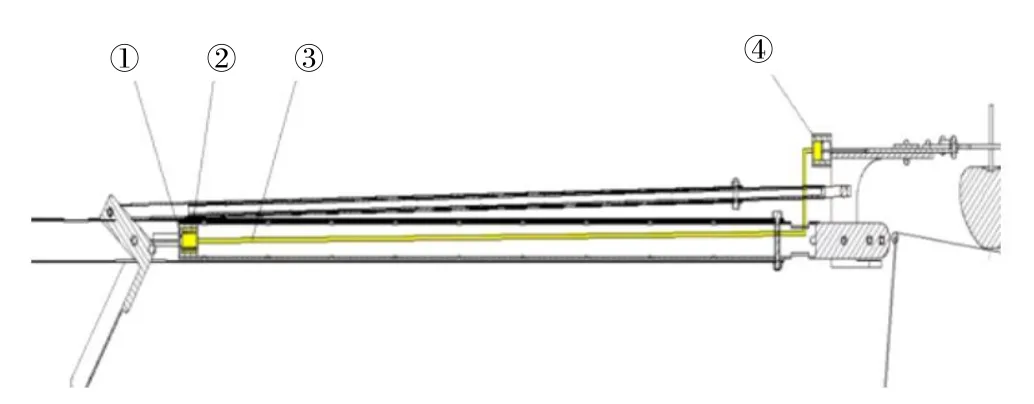
图5 液压系统示意图
3.2.2 液压系统的工作原理
液压传动系统的主要功用是传递动力,由驱动装置带动油压,去控制油缸活塞杆伸出或缩回来执行各种动作。当液压的液体流入液压缸后把压力传给活塞。刀头的开合取决于加在活塞上的动力的方向。在驱动装置带动油压使活塞推杆往向前进时,刀头开始向物体,然后刀头合并起来,实现剪断树枝的功能。当油压减少时,活塞会在弹簧的弹力下往后退,实现复位,刀头张开[7]。
4 强度校核
在设计过程中,通过ANSYS/中望仿真软件平台对部分关键零部件进行了强度校核。在使用过程中,该产品主要承受了采摘的水果重量、自身重力和自身加在手柄上的力,因此,对支架和手柄进行了静态线性分析,以提高产品的可靠性。
在Static structural 模块下,选择零件的材料为45#钢,包括泊松比、弹性模量和密度等参数。选择合理的网格划分方案,将支架平台与角度固定机构划分网格,包含了2828 个节点、14960 个单元。施加固定约束在支架底座平台上,压力force50 N,分析该零件的应力及变形分布情况[8]。
图为支架的静态线性分析图,从图6 中看出,应力集中点为支撑板上,从前文可知,本机构采用45#钢正火处理加工,其材料屈服强度为290 MPa,因此,该机构强度符合要求。
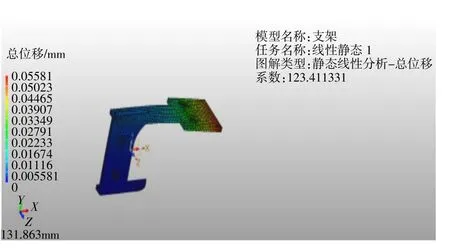
图6 支架的静态线性分析图
采用同样的方法分析手柄。选择零件的材料为合金[结构钢A36],将手柄划分网格包含了3223 个节点、16239 单元。施加固定约束Fixed Support 在与杆子连接处,压力force20 N,分析该零件的应力及变形分布情况。图7 为手柄机构的静态线性分析图,从图中看出,应力集中在手柄的尾处,最大应力为131.6 MPa,该机构强度符合要求。
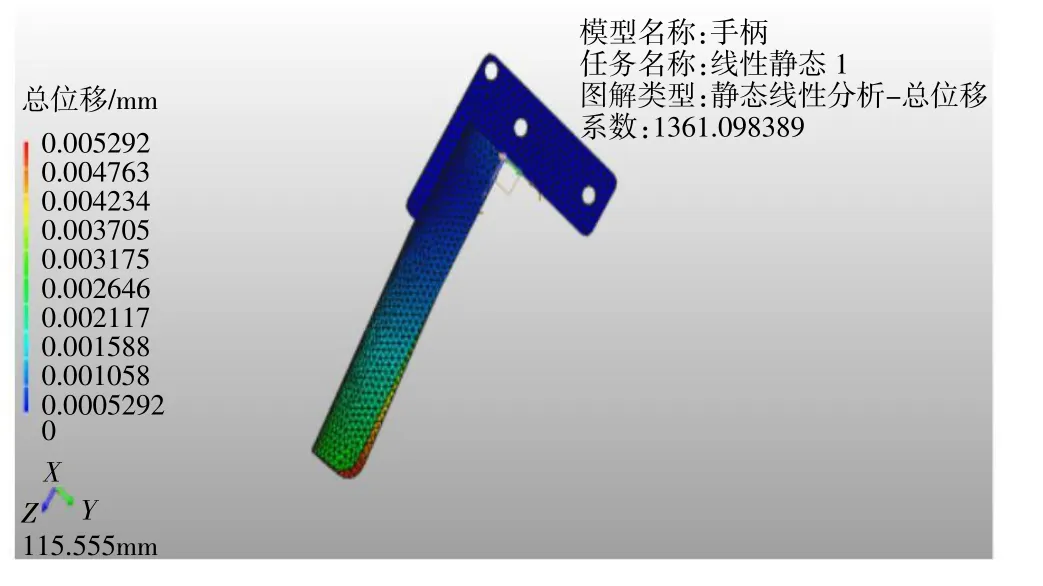
图7 手柄的静态线性分析图
5 功能状态仿真
第一步:机械手靠进苹果,然后拨动把手,如图8所示。

图8 示意图
第二步:把手依靠液压系统驱动剪刀手,如图9所示。

图9 示意图
第三步:剪刀头闭合,如图10 所示。
第四步:苹果枝被剪刀剪断,苹果自然掉入收纳袋里面,如图11 所示。

图10 示意图

图11 示意图
6 结语
采摘机械手的设计使用了液压系统,它将液压传动优点充分发挥出来,还实现了控制方便及安全可靠的目的。这样就解决了在恶劣环境下采摘苹果的实际问题,降低了操作人员的劳动强度,提高了生产效率。以机械手臂为基础的水果收割装置,是一种包含了自主行动功能的技术含量高,属于液压式的简单的收摘器。该装置结构简单、使用简便、成本低、效率高。使用了剪切式机械手臂,可以调整手臂的长度,这使得它可以适用于各种高枝水果,而且还可以方便地随身携带。采摘器使用了液压系统带动到刀片转动的方式来对果梗进行切割,这样可以快速地收获果实,节省了很多人力。该采摘器的方向可调节,适合于多种位置的高枝果实,能够将果实完全采摘,并能确保其保质保量,是一种具有良好推广价值的实用新型。