城市轨道交通信号系统过分相限速保护方案研究
2023-10-24杨荣兵梁建彬毕文峰张定文
杨荣兵,梁建彬,毕文峰,张定文
(1. 成都地铁运营有限公司,四川成都 610081 ;2. 卡斯柯信号有限公司,上海 200435)
1 概述
国内城市轨道交通行业各线路列车在非正常运营情况下需要切换为人工驾驶模式,在人工驾驶模式中,限制人工驾驶模式(RM)同样受限列车运行速度不得超过25 km/h的规定,同时信号系统RM运行超速防护。对于单相交流供电制式线路会在2个供电分区的分隔处设置分相区,运行中的电客车需利用惯性通过分相区。实际运营过程中,当信号系统出现故障或故障车连挂运行需要切换到RM运行时,就会存在列车因限速过低无法利用惯性通过分相区的问题。因此,本文提出一种过分相驾驶模式,并以某条设计最高运行速度160 km/h、配置电客车最高运行速度140 km/h、接触网电分相中性区域长度160 m的城市轨道交通线路为例,对信号系统新增“过分相驾驶模式”的可行性进行讨论,确保非正常运营情况下信号系统提供人工驾驶模式的超速防护及列车正常通过分相区2个目标实现。
2 接口要求和存在的问题
2.1 相关规范要求
在单相交流牵引供电系统中,列车是由单相电源供电的,为使电力系统的三相供电负荷平衡和提高电网的利用率,供电接触网采用分相段供电。国内城市轨道交通线路采用单相交流牵引供电制式时,为防止两供电分区之间因电力相位不同产生的相位电位差,导致运行的电客车受损,通常在2个供电分区的分隔处设置电分相设备以防止相间短路,并实现A、B、C相电源相序隔离。分相区中性区段简要示意如图1所示。
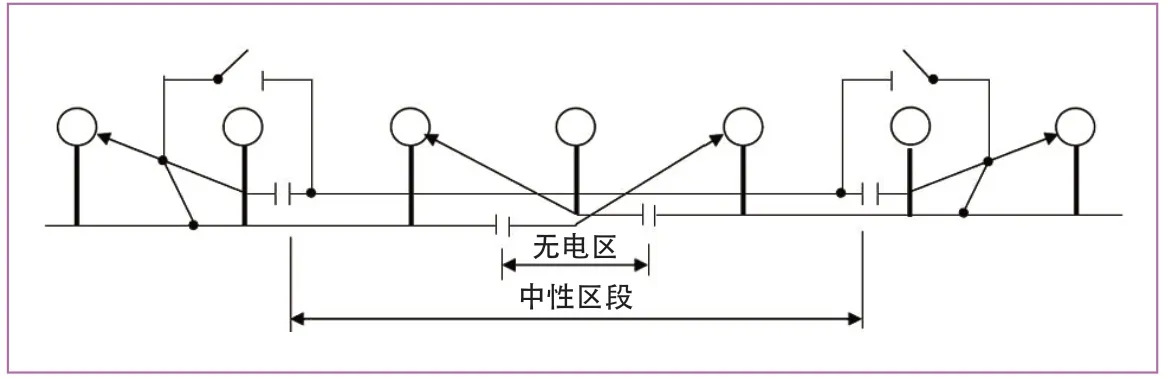
图1 分相区中性区段示意图
根据《铁路技术管理规程》(铁总科技[2014]172号),在电气化区段接触网电分相前方,需分别设置断电标、禁止双弓标。对于最大运行速度高于120 km/h的旅客列车,在断电标的前方增设特殊断电标(T断)。在双线电气化区段,需在“合”“断”电标背面分别加装“断”“合”字标,作为反方向行车的“断”“合”电标使用。分相区布置示意如图2所示。
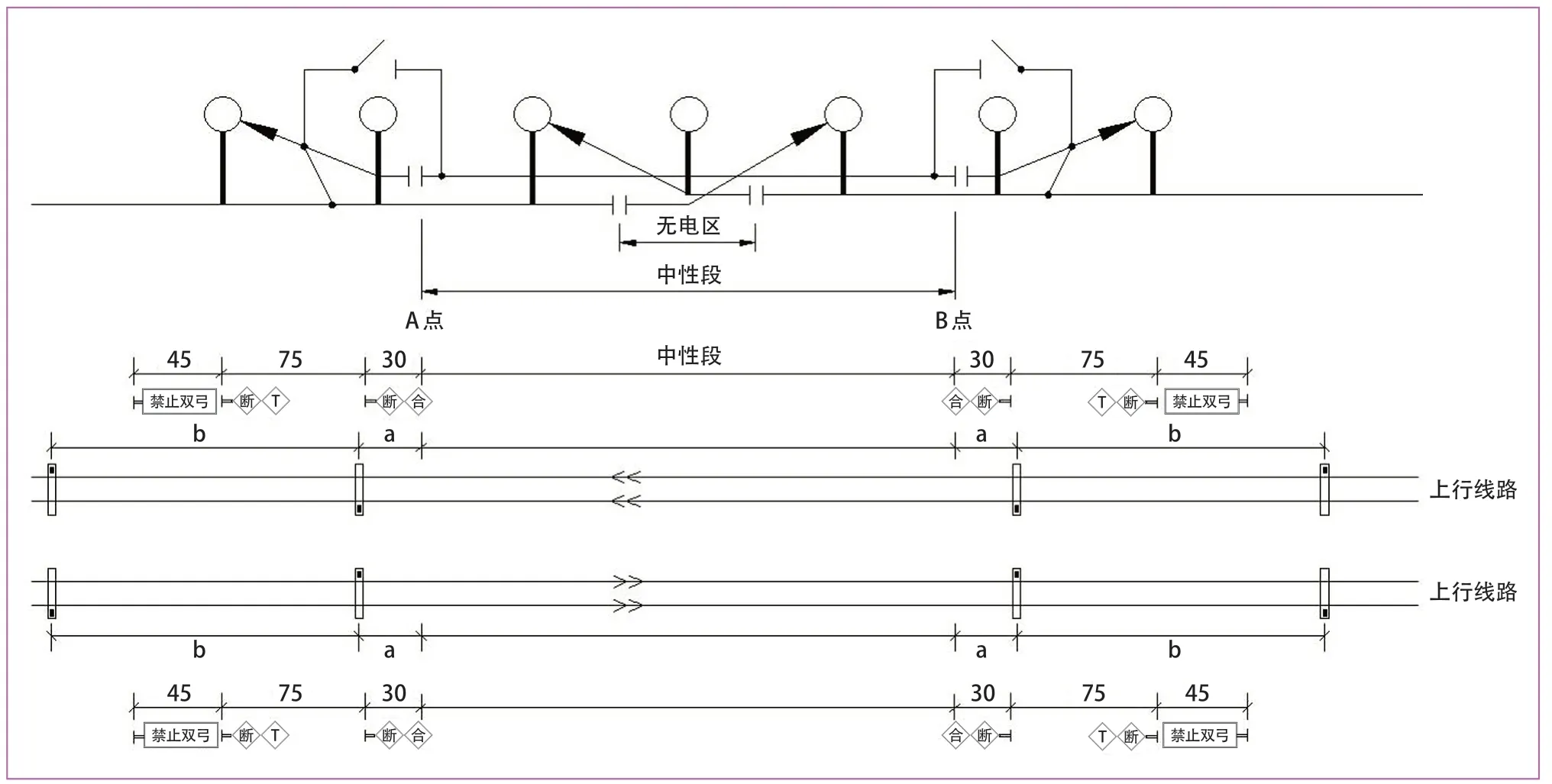
图2 分相区布置示意图(单位:m)
根据《车载控制自动过分相系统技术条件》(TB/T 3197-2018),从“断”电标位置为中心向左右两端各5 m确定第一个地面磁感应器的安装位置(强迫断点)a,定下第一个地面磁感应器的安装位置(强迫断点),再以这个点为中点向左右分别测量一定距离b,定下第二点的位置(预告点)。同时反向运行时的预告点和强迫断点,也作为正向运行时的恢复点使用。对于非货运专线,a = 35 m、b = 170 m。从列车运行方向起依次设置禁止双弓标、特殊断电标(T断)、断电标、合电标。
按照《轨道交通客运列车断电过分相系统相互匹配准则》(GB/T 36981-2018)相关要求,故障运行限速模式下,“合”电标前的出口行驶速度不宜低于5 km/h。
2.2 线路设计情况
本研究线路牵引供电系统设计的中性段距离长度为160 m,其中无电区为30 m。本线属于非货运专线,a = 35 m,b = 170 m,对应“断”“合”电标布置地面磁感应器。当列车通过时,根据读取地面磁感应器发送的信号自动进行“断”“合”主断路器操作。列车通过自动分相区时,车辆读取地面磁感应器信息自动“断”“合”主断路器的惰行距离为:(b + a +中性段+ a)=(170 + 35 + 160 + 35)= 400 m。人工驾驶列车通过分相区时,正常情况下司机按照轨旁特殊断电标(T断)、合电标人工“断”“合”主断路器的惰行距离为:75 + 30 +中性段+ 30 = 75 + 30 + 160 + 30 = 295 m。
2.3 范本接口要求
按照中国城市轨道交通协会发布的《城市轨道交通车辆与信号系统接口技术要求(范本)》4.3.1.3要求,信号系统提供RM按固定限速进行超速防护,当信号系统检测到超速时立即启动报警并施加紧急制动,直至列车停止运行。
本线设计与国内惯例及通行设计限速取值25 km/h保持一致。按照设计方案,非正常运营模式下(含 RM和故障车推送模式),由司机手动驾驶列车通过分相区。
2.4 存在问题
按照上述要求,经牵引计算可知,当司机采用RM操纵列车以不高于25 km/h的速度运行时,在本线分相区设计最大坡度7‰、惰行初速25 km/h、惰行末速5 km/h条件下,列车的最大惰行距离约为280 m(小于惰行区段的长度)。因此采用RM的列车,无法顺利通过分相区。
经了解,国内城市轨道交通行业类似交流牵引供电制式线路,也存在同样问题,无法在信号系统提供RM模式限速25 km/h运行的情况下,确保列车依靠惯性顺利通过分相区。为解决该问题,需要提高分相区内的运行速度,在信号系统既有RM无法调整限速的情况下,应新增“过分相驾驶模式”。仅在识别到分相区时,建立该模式并提供顺利通过分相区所需限速对应的超速防护功能。依照本线路坡道、曲线等限制条件,适当考虑司机操作的便利性,本文暂按过分相限速为50 km/h进行技术方案的讨论。对于各条线路最终要确定的“过分相驾驶模式”限速,应综合考虑线路条件及过分相区长度,由设计单位计算后结合现场调试验证情况最终确定。
3 驾驶模式建议方案
3.1 技术方案
为便于设备维护、降低人员培训难度、利于备件统一,同时考虑到本线已安装投用的地面磁感应器、车上读取设备均经国铁电气化铁路以及城市轨道交通交流牵引供电制式线路大量运用,在信息安全读取、防止误读的可靠性方面已得到长期验证,因此该方案沿用既有磁感应器型号,通过在钢轨中间新增单独读取设备的方式,避免因信息误读带来的风险。
车辆专业在列车驾驶端对应两钢轨中心线转向架位置新增车上读取设备,并通过连接线缆与车上读取主机连接。主机获取新增设备读取的信息后立即通过接口将信息发送给车辆及信号系统,用于触发语音提示,以及建立或退出“过分相驾驶模式”。
按照列车牵引曲线,在确保“合”电标前出口速度不低于5 km/h的情况下,倒推计算列车需要维持50 km/h的线路里程,并在该里程段的起始位置地面两钢轨中间新增地面磁感应器。列车同步新增读取设备,并在读取信息后对外转发,由车载信号系统根据收到的信息建立“过分相驾驶模式”,允许列车限速50 km/h运行并防止司机超速。
按照列车牵引曲线,在确保“合”标前出口速度不低于5 km/h情况下,倒推计算需要列车维持25 km/h的线路里程的适当位置(留出司机听取语音并确保列车运行速度降至不超过25 km/h所需时间对应的列车运行距离),在地面两钢轨中间新增地面磁感应器。列车新增设备读取信息后对外转发,由车载信号系统根据收到信息退出“过分相驾驶模式”,允许列车限速25 km/h运行并防止司机超速。
为确保安全,车辆信号接口需进行安全设计,应确保列车在RM运行的前提下,仅在读取到新增地面磁感应器相关信息后,方可建立“过分相驾驶模式”。在读取到新增地面磁感应器的相关信息,或按“过分相驾驶模式”运行通过分相区所需时长倒计时至0时,系统立即退出“过分相驾驶模式”,恢复RM超速防护功能。同时,为确保列车依靠惯性通过分相区的需要,信号系统提供的“过分相驾驶模式”不会执行低于50 km/h的临时限速,相应的规章应予以明确。当然,对于既有列车没有新增“过分相驾驶模式”的情况,人工驾驶列车过分相区时,通过地面磁感应器对应里程时的实际速度也不能低于50 km/h,相关规章应明确调度员不得对分相区设置低于50 km/h的临时限速要求。
上述方案是结合线路特点设计。对于后续新建线路,牵引供电系统应对分相区的设置位置进行优化:一是分相区的位置要避免设置于线路限速不满足列车依靠惯性通过的区域;二是线路条件允许情况下,研究将分相区设置于平坡段的可行性。
3.2 运营操作方案
司机操作列车按RM运行时,当列车运行至新增地面磁感应器时,车辆检测到该地面磁感应器信息后转发给车载信号系统,同步进行语音播报“前方即将进入分相区,请操作列车以接近且不超过50 km/h限速运行”。车载信号系统收到信息后,自动建立“过分相驾驶模式”,将限速上调至50 km/h,司机按语音提示人工操作将列车运行速度提升至不超过50 km/h,确保列车可以利用惯性正常通过分相区。
当列车依次运行至分相区既有设置的4个地面磁感应器时,语音按正常设计依次提示,车辆牵引系统按既有设计依次断开、闭合主断路器。
当列车运行至新增地面磁感应器时,车辆检测到该磁感应器信息后转发给车载信号系统,同步进行语音播报“前方即将通过分相区,请操作列车以不超过25 km/h限速运行”。收到信息后,车载信号系统自动退出“过分相驾驶模式”,恢复 RM,司机操作列车按25 km/h限速运行。
3.3 新增设备安装要求
按照地面磁感应器磁感应强度技术指标,当偏离感应器中心超过200 mm 时,磁感应强度衰减为0。因此在确定新增地面、车上设备安装位置时,需确保与既有设备之间的距离大于200 mm以上,本线路进一步提高要求,最终确定安装距离不得小于800 mm。
新增地面磁感应器安装在两钢轨中心线处与既有设备平行(图3磁感应器1、6),两条平行线中心点相距1 050 mm,远大于200 mm,也符合不小于800 mm要求,因此新增设备和既有设备之间不会相互影响。同时,由于本方案要求提升“过分相驾驶模式”超速防护速度,由此确定的新增设备安装位置与既有设备在线路运行方向上相隔较远,更需确保不存在安装空间、磁感应空间的物理重叠。
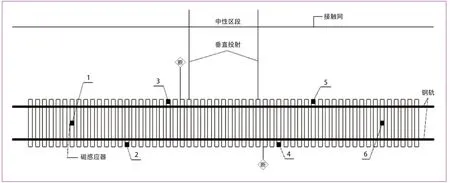
图3 新增地面磁感应器空间示意图
新增车载感应器安装于列车转向架、车体中心线上,与地面两钢轨中心线重合,同理与既有地面设备距离也符合不小于800 mm要求,不会生产磁感应空间的物理重叠。
因此,采用新增地面设备安装于两钢轨中心线的安装方案,在保证列车安全读取建立或退出“过分相驾驶模式”信息的同时,也完全避免了该信息会被既有车上读取设备错误获取的可能。直接选用既有通用设备,完全可以实现相应功能。
对于后续新建线路,可以进一步研究新增地面和车上设备匹配独立的磁特性参数(与既有设备之间磁特性参数不同)的可能方案,尽可能从最底层实现与既有过分相地面磁感应器相互区分。这样轨旁设备可以采用与既有设备一致的安装方案,利用1套车上设备,通过读取的不同磁特性参数转换后的信息,用于断、合主断路器,或者建立、退出“过分相驾驶模式”。
3.4 风险分析
新增“过分相驾驶模式”提高了超速防护的限速,因此只能在分相区域有效,其余区段须依照既有设计按 RM运行。具体风险点包括段场内运行、正线道岔侧向运行、正线小半径曲线运行等。由于段场运行限速通常较低,本线为25 km/h,若因故错用过分相驾驶模式,将带来安全风险。列车在正线限速50 km/h以下线路以及道岔侧向运行时,若因故错用过分相驾驶模式,同样会带来安全风险。
4 结束语
针对国内城市轨道交通行业交流牵引供电制式线路,在信号系统 RM 提供限速25 km/h超速防护情况下,普遍存在无法确保列车依靠惯性通过分相区的问题,本文结合相关规范要求对该问题进行了分析,提出采用已有通用设备新增安装的方案,由车辆、信号系统按照故障-安全原则进行接口设计,信号系统在检测到列车处于RM的前提下,在读取到新增地面磁感应器相应信息时建立或退出“过分相驾驶模式”,确保列车可以依靠惯性顺利通过分相区的可行方案。按照该方案,在“过分相驾驶模式”有效期间,信号系统提供50 km/h超速防护;在退出“过分相驾驶模式”后,自动恢复 RM,信号系统提供25 km/h超速防护,从而实现超速防护和顺利通过分相区的目标兼顾。
本方案虽结合线路特点提出,但对于国内类似交流牵引供电制式线路也可作为参考,具备可推广、可复制、可直接采用的特点。在此基础上,建议后续线路采取以下措施:一是设计分相区时,结合线路限速情况对分相区设置区段进行选择,要避免设置在线路限速不满足列车依靠惯性通过的区域;二是线路条件即供电设计要求允许的情况下,研究将分相区设置于平坡段的可行性,尽可能利用通用 RM 25 km/h超速保护功能,实现列车依靠惯性通过分相区,避免因新增设备安装、分相区特殊临时限速要求给运营、维保带来的不便;三是研究新增地面磁感应器与车上设备匹配独立的磁特性参数的可能方案,实现利用既有车上设备读取地面设备的不同磁特性参数转换后的信息,控制断、合主断路器,或者建立、退出“过分相驾驶模式”。
