激励信号对无驱动MEMS 陀螺输出灵敏度的影响
2023-08-03徐聪张伟郭子龙
徐聪 张伟 郭子龙
1.北京信息科技大学仪器科学与光电工程学院,北京 100101;2.西安工业大学光电工程学院,陕西西安 710021
0 前言
随着科技智能技术的不断发展,作为其关键技术之一的微机电系统(Micro Electro Mechanical Systems,MEMS)传感器也进入到了快速发展阶段,加之人们对自动化领域技术需求的上升,性能好和小型化的MEMS 产品由此占据市场领先地位,MEMS 陀螺得以迅速发展[1-2]。由于无驱动MEMS 陀螺自身没有驱动结构,是利用旋转载体的自旋获得角动量,所以相比其他陀螺仪具有结构简单、体积较小、可靠性强、成本低、易批量生产等优势。因此,在消费电子、航空航天、机器人、高精度导弹等军事和民用领域得到了广泛的应用。
激励信号的选取对于陀螺的检测灵敏度有着直接的影响,并且在整个陀螺电路中具有重要的作用[3]。实验研究了不同电压、波形及频率的激励信号对陀螺输出灵敏度的影响,为无驱动MEMS 陀螺仪选用合适的激励信号以获取高灵敏度提供了依据[4-5]。
1 陀螺的结构及检测原理
图1 为无驱动MEMS 陀螺的结构原理图。陀螺主要由上下两侧镀有2 个钯银电极的陶瓷片和中间有刻蚀阻尼孔的敏感质量块组成。利用旋转载体自身角速度作为驱动力,坐标系OXYZ固定在敏感质量块上面,上下陶瓷片和敏感质量块之间留有振动间隙,其间充有氮气,与之形成4 个电容器。
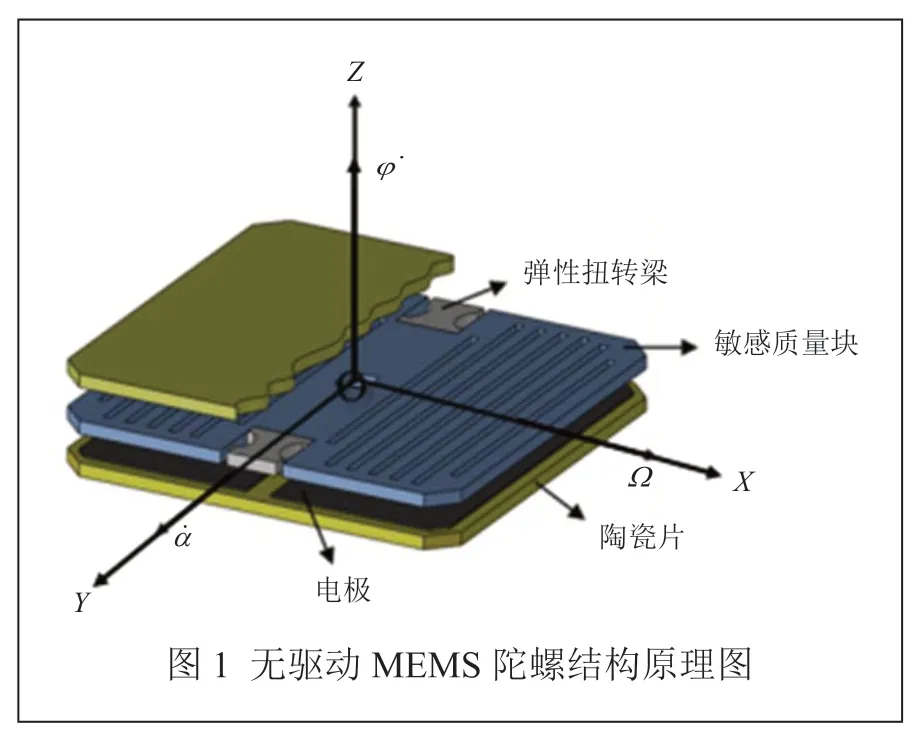
通过对坐标的变换、欧拉力学方程分析,得出陀螺的敏感结构力学方程为:
其中,JX、JY、JZ分别为敏感质量块在OX、OY、OZ轴上的转动惯量;KT为陀螺的扭转刚度系数;D为气体的阻尼系数;α为敏感质量块绕着OY轴摆动的角速度;φ为载体自旋时产生的角速度;Ω为载体做俯仰或偏航运动时的角速度[6]。
可以推导出敏感质量块角振动幅度为:
由公式(2)可以看出,通过角振动幅值αm可检测载体的角速度Ω,角振动频率φ可检测载体的转速。
无驱动MEMS 陀螺是一种不需要驱动结构的陀螺,它能够通过载体自身的角速度引起敏感结构的摆动。当载体受横向角速度Ω影响进行偏转时,敏感质量块摆片摆动导致摆片和电极板之间的距离产生变化,进而摆片与电极组成的4 组电容(C1,C2,C3,C4)发生相应变化[7-8]。电容敏感检测方式图如图2 所示。
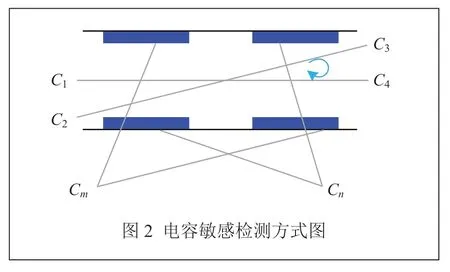
图3 为电容电桥检测图。Um是输入信号,接在桥式电路中。当待测电容发生变化时,交流电桥输出为与激励信号频率相同的调幅信号,对信号进一步处理,可得到与待测电容成比例的电压信号。
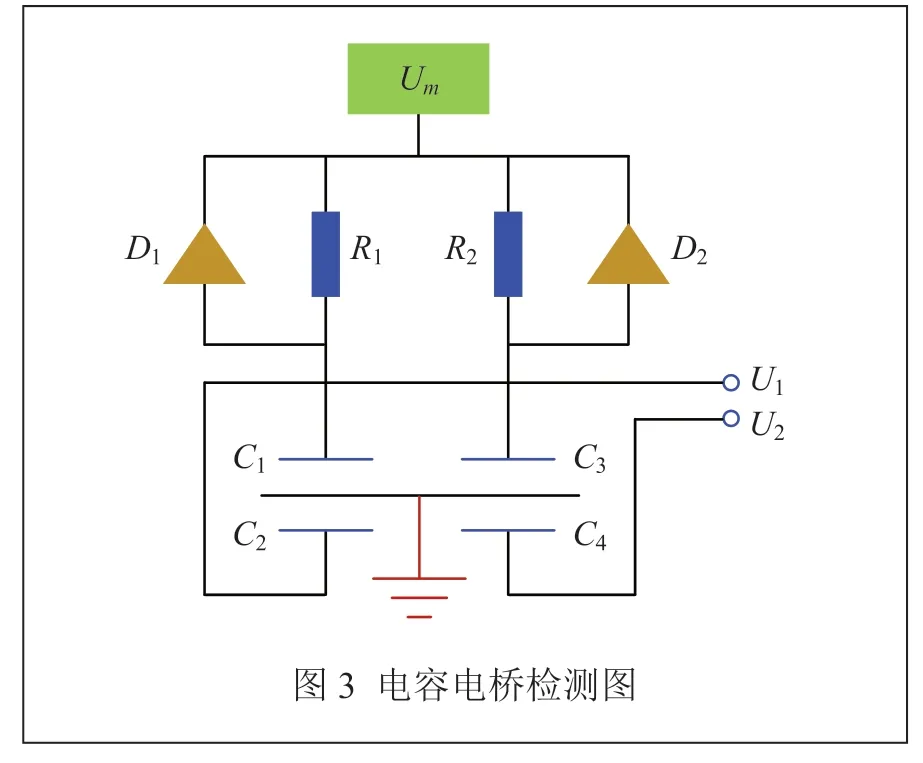
(1)在电容充电过程中,二极管反相截止,对待测电容进行充电,有:
其中,时间常数τ1=R2Cn,τ2=R1Cm,电容C1和C4并联,形成电容Cm,C2和C3并联,形成电容Cn,Cm和Cn就构成了一对差动电容。
(2)在电容放电过程中,由于二极管被正向偏置,其处于导通状态,同时电阻很小,这使得待测电容上的电荷可以瞬间地被放电,此时U1=U2=0。
则,在输入信号的一个周期内,桥路a点处的输出电压的平均值为:
出于对陀螺敏感元件结构的考虑,设Cn=C0-ΔC,Cm=C0+ΔC,其中,C0是敏感质量块在平衡位置时所处的m、n点电容;ΔC是敏感质量块振动时电容的改变量。鉴于振动摆角相对间隙很小,因此,ΔC远小于平衡时的电容值C0,由式(5)可得:
同理,
令R1=R2=R,则有:
公式(9)说明,小信号检测电路输出电压随着电容变化量的增加而相应变化,二者呈正比关系。此外,小信号的检测灵敏度表示为:
通过上述分析可知,充电时间常数决定了信号频率的选择,为提高小信号检测灵敏度,需增大电桥两端输出电压均值的差值,对于选用方波激励来说,增大充电曲线下的面积,即增大方波信号的占空比,可以提高电桥两端输出均值之间的差值。
2 不同激励信号对无驱动MEMS 陀螺灵敏度影响的实验研究
2.1 无驱动MEMS 陀螺传感器灵敏度的定义
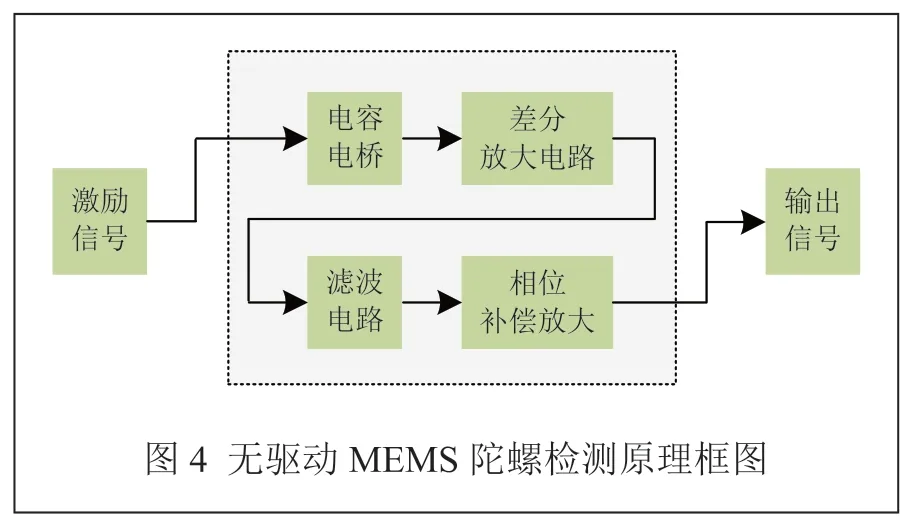
实验采用Agilent81150A 信号发生器作为激励源,产生具有不同幅值和频率的方波和正弦波信号,施加于陀螺的输入端,用于激励由陀螺组成的电容桥式电路。陀螺的输入信号通过电容电桥输出与激励信号相同的调幅信号,通过差分放大电路进行放大,经滤波电路保留有用信号,随后经过相位补偿和进一步的信号放大,最终输出模拟信号给示波器。利用AgilentMSO7032A 示波器的X1 通道可以实时地显示陀螺电路的输出波形。图4 为无驱动MEMS 陀螺检测原理框图。图5 为信号发生器和示波器与测试平台连接实测图。
2.2 激励信号频率对灵敏度的影响
将幅值固定,把不同频率和波形的激励信号施加在电容电桥的输入端(Um),这时的输入电压幅值不变。
当幅值为0~5 V,而频率不同的正弦波、方波分别施加到陀螺传感器输入端时,实验测出陀螺灵敏度与激励信号频率关系,如图6 所示。
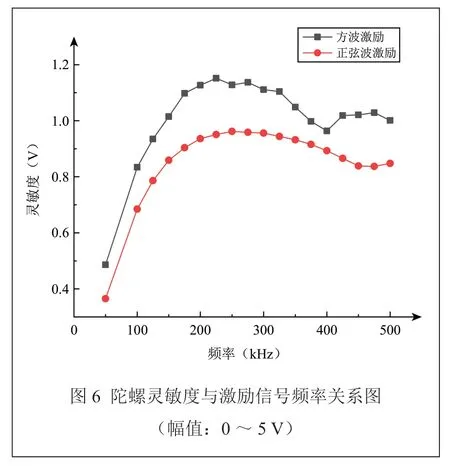
Agilent81150A 信号发生器输出方波信号的频率范围为0~500 kHz,正弦波信号频率范围为0~1 MHz。由图6 可知,陀螺在方波激励信号下,灵敏度随频率先增大而后减小,且在频率为225 kHz 时灵敏度为最大;在正弦波激励信号下,随着频率的增加,灵敏度先迅速上升,然后减小,最后趋于饱和,当频率达到225 kHz 时,灵敏度达到最大值。通过灵敏度与激励信号频率关系可以得出,在0~500 kHz 频率范围内,使用方波激励信号,灵敏度最大,其次才是正弦波激励信号。由此可以得出,在相同频率的情况下,方波激励信号可以获得更高的灵敏度。
当幅值为-5~+5 V,而频率不同的正弦波、方波分别施加到陀螺输入端时,测出陀螺灵敏度与激励信号频率关系,如图7 所示。
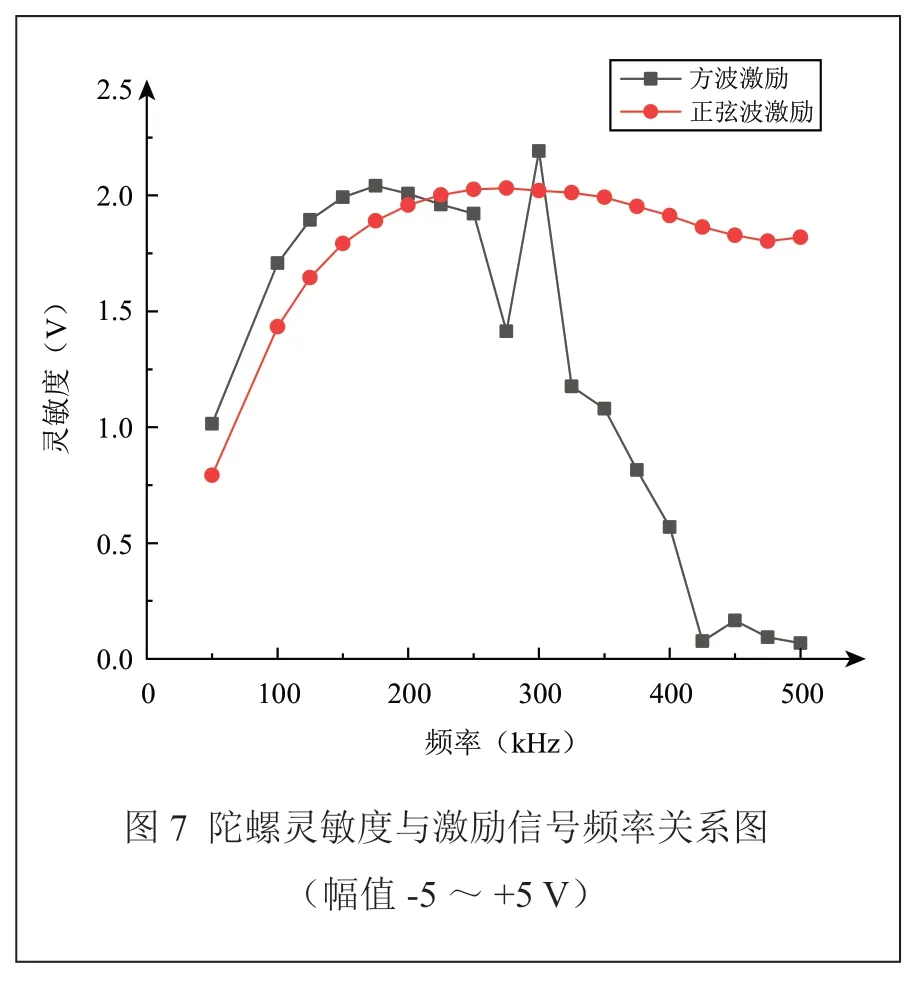
由图7 可知,当使用方波信号作为激励条件时,陀螺的灵敏度随着频率的变化呈现先增大后减小,再增大后又减小的规律,在频率为300 kHz 时,陀螺的灵敏度达到最大值;当使用正弦波信号作为激励条件时,陀螺的灵敏度随着频率的变化呈现先增大后趋于平缓的规律,且当频率在250 kHz 附近时,灵敏度达到最大值。通过灵敏度与激励信号频率关系可以得出,在0~212 kHz 频率范围内,使用方波激励信号灵敏度最大,其次才是正弦波。在212 kHz~500 kHz频率范围内,正弦波信号激励下的灵敏度最大且趋于稳定。
2.3 激励电压对灵敏度的影响
在研究激励信号频率对灵敏度的影响时,由图6和图7 可知,2 种波形在不同激励电压和不同激励频率作用下,幅值范围为10 V 的方波或正弦波的灵敏度是幅值范围为5 V 的2 倍。
因此,选择幅值大的方波激励信号和正弦波激励信号能有效地提高陀螺输出灵敏度。由图6 可知,当激励频率小于212 kHz,激励幅值范围为10 V 时,使用方波激励信号能使陀螺具有较好的灵敏度;当激励频率大于212 kHz,激励幅值范围为10 V 时,使用正弦波作为激励信号,可以显著提高陀螺的灵敏度。
在实际应用过程中,信号的激励可以采用方波激励或者正弦波激励。由于产生正弦波信号所需的电子元器件较多,相比之下,电路较为复杂,不便于电路集成,故本文选取幅值为5 V,频率为139 kHz 的方波信号作为激励。
2.4 方波激励占空比对灵敏度的影响
将幅值、频率固定,占空比不同的方波信号施加在陀螺输入端上。Agilent81150A 信号发生器产生幅值5 V,频率139 kHz 方波为激励信号施加在陀螺输入端上,根据实验测得陀螺灵敏度与激励信号占空比之间的关系如图8 所示。
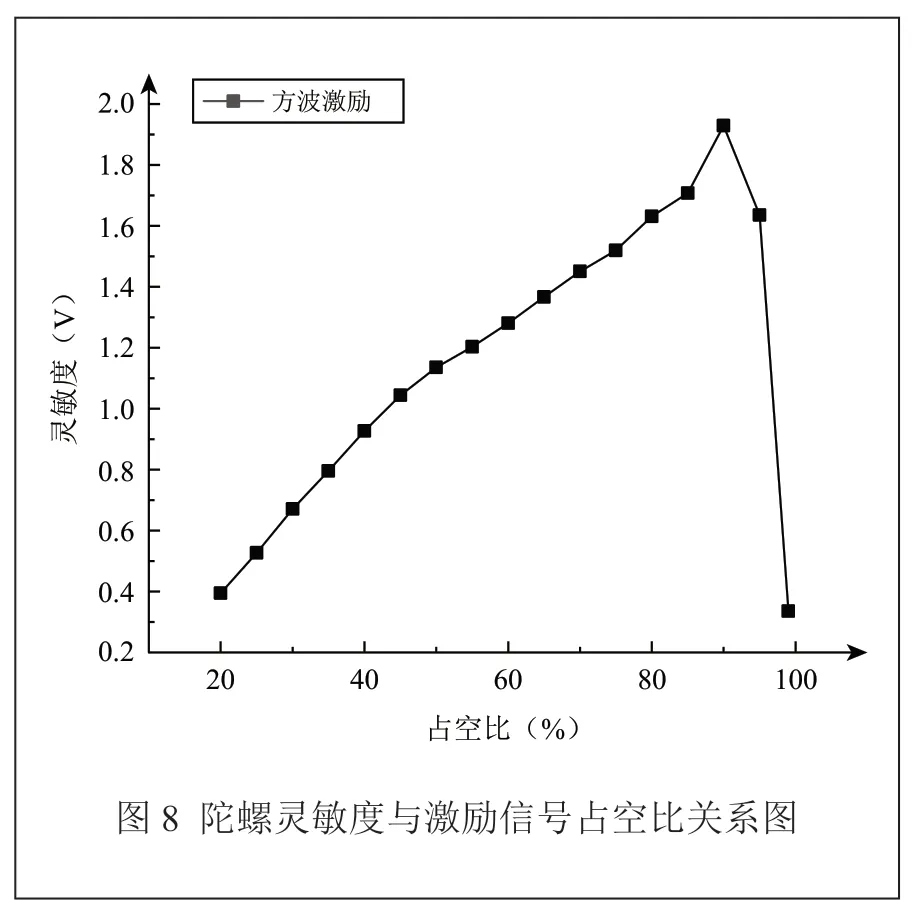
根据实验结果可知,当方波的占空比低于10%时,方波波形中含有较多的高谐波成分,对信号的幅值会产生较大的影响,所以方波信号占空比的选择应该控制在10%~99%范围内。由图8 中陀螺灵敏度与激励信号占空比关系可知,在幅值与频率一定的条件下,激励信号占空比在10%~90%范围内,灵敏度持续增加;其余范围内,陀螺传感器灵敏度都在变小;占空比在10%~85%范围内,灵敏度平缓增长;85%~90%范围内,灵敏度增长幅度较大;90%~99%范围内,灵敏度出现幅度急剧下降的情况。因此,在相同幅值和频率下,要获取较高的灵敏度应选择70%~90%的占空比作为激励信号。为了使陀螺具有高灵敏度,而且还要降低谐波对测试结果的影响,选择占空比为80%左右的方波作为激励信号为最佳。
3 结束语
基于MEMS 技术的无驱动陀螺是惯性仪表的一个重要分支。在旋转导弹作战时,对姿态信息的准确获取需要能实时测量旋转导弹角速率的陀螺。为了提高无驱动MEMS 陀螺输出灵敏度,实验对激励信号的幅值、频率和波形种类进行了研究,得出激励信号不同幅值、频率和类型,以及方波不同占空比下的陀螺灵敏度的变化特性,并对其频率和占空比的取值范围进行了分析,为选用合适的激励信号使无驱动MEMS 陀螺有效提高输出灵敏度提供了参考。
