迈克尔逊干涉仪自动测量系统设计与实现
2023-08-01穆晓东

摘 要:在迈克尔逊干涉仪测量氦氖激光波长实验中,若要提高干涉条纹亮度,需要降低环境光强;此外,从仪器动镜位置读数不够便捷,并且连续计数上百个干涉条纹个数容易导致眼疲劳,带入计数误差。为了解决这些问题,研制了迈克尔逊干涉仪自动测量系统,它实现了自动计数干涉条纹个数和自动计算动镜位移,并将计算结果动态显示在液晶屏上。
关键词:迈克尔逊干涉仪;直流电机;光电编码器;光敏电阻传感器;单片机
中图分类号:TH744 文献标识码:A 文章编号:2096-4706(2023)11-0172-04
Design and Implementation of Automatic Measurement System for Michelson Interferometer
MU Xiaodong
(School of Physics and Optoelectronic Engineering, Shandong University of Technology, Zibo 255000, China)
Abstract: In the experiment of measuring He-Ne laser wavelength with Michelson interferometer, in order to improve the brightness of interference fringes, the ambient light intensity need to be reduced; In addition, reading number from the position of the instrument's moving mirror is not convenient enough, and continuously counting hundreds of interference fringes can easily lead to eye fatigue and lead to counting errors. In order to solve these problems, an automatic measurement system of Michelson interferometer is developed, which can automatically count the number of interference fringes and automatically calculate the displacement of moving mirror, and dynamically display the calculation results on the LCD screen.
Keywords: Michelson interferometer; DC motor; photoelectric encoder; photoresistor sensor; Single-Chip Microcomputer
0 引 言
邁克尔逊干涉仪是利用分振幅法产生双光束以实现干涉的精密光学仪器,通它可以测定微小长度、折射率和光波波长等,也可以用来研究如温度、压强、电场、磁场以及媒质的运动等物理因素对光线传播的影响。
我校的大学物理实验课开设了用迈克尔逊干涉仪测量氦氖激光波长这一实验。实验中,为使观察屏上的干涉条纹更加明亮,需在较暗环境下测量。由于环境较暗,又不方便从仪器读取出动镜位置读数。测量过程中,每数一定的条纹个数,需从仪器读取动镜在导轨的位置,直至数完上百个干涉条纹为止。如此操作,眼睛易疲劳,出现计数错误,并且每读一次动镜位置,继续旋转微调手轮时,易旋错方向,带入回程误差。鉴于上述问题,驱使我们对迈克尔逊干涉仪进行改进。
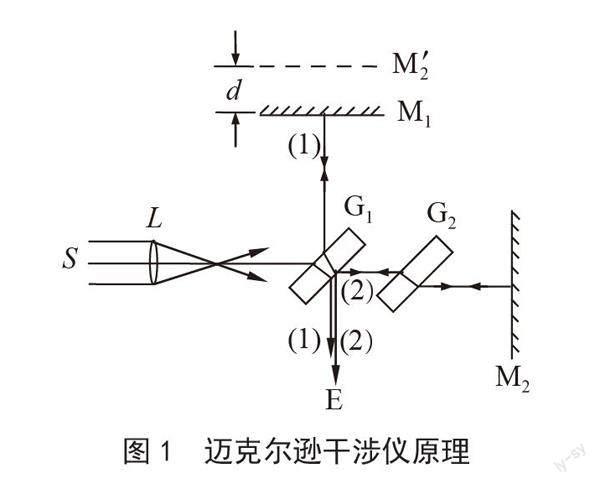
1 迈克尔逊干涉仪测量氦氖激光波长的原理
原理如图1所示。在两个平面M1与M2严格垂直的情况下,从激光器发出的光束被分光板G1分成强度相近的两束光,反射光(1)经移动镜M1反射后,再经G1部分地透射;透射光(2)经补偿板G2射向参考镜M2反射后,再经G1部分地反射。两束光同时汇聚于观察屏E,观察屏上形成一组内疏外密的等倾干涉圆环。M'2是参考镜M2经分光板形成的虚镜,两镜之间的平行距离为d,两束光的光程差δ为2d,若动静M1移动?d,观察屏E上“吞”或“吐”N个条纹,可推出波长公式λ = 2?d / N。因此,测量光的波长需要测量两个物理量,一个是“吞”或“吐”条纹的个数N,一个是对应“吞”或“吐”N个条纹的动镜位移?d [1]。
2 实验中存在的问题
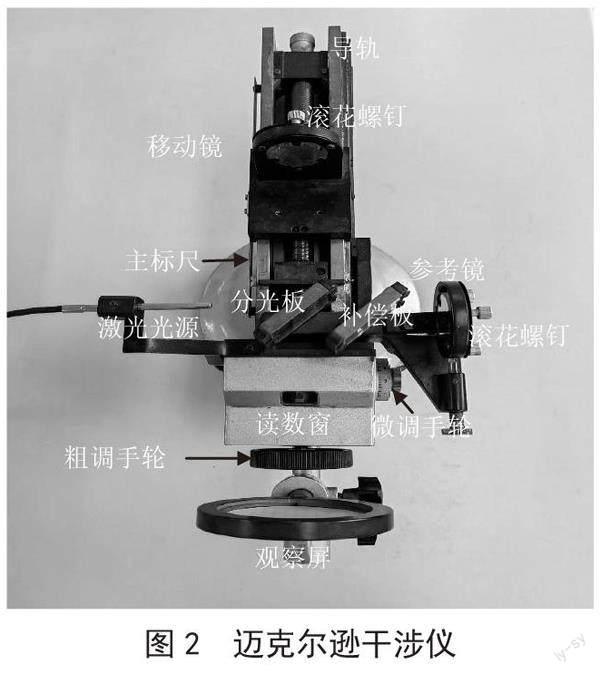
2.1 读数不便
迈克尔逊干涉仪如图2所示。为了突出观察屏上等倾干涉圆环的亮度,实验要求在较暗环境下进行。动镜位移是动镜在导轨上的两个位置读数相减得到的。显然,在较暗环境下不方便从仪器读取动镜在导轨上的位置读数。
动镜在导轨的位置读数是通过主标尺、读数窗、微调手轮三部分读出,读数较麻烦。
为了降低测量误差,采用逐差法计算氦氖激光波长。实验中应保持微调手轮始终朝一个方向旋转,每数一定的圆环个数(如20个),读取动镜在导轨上的位置读数,直到数出总圆环个数(如160个)。在测量过程中给,读出动镜位置读数后,继续旋转微调手轮时,易旋错方向,代入回程误差。
2.2 计数误差
在黑暗环境里,连续人工计数上百个“吞”或“吐”条纹个数。由于长时间地观察激光干涉圆环,眼睛易疲劳,出现漏计或多计的现象。
2.3 精度问题
微调手轮的最小分度为100 nm每格,精度仍有较大的提升空间。
针对以上提出的问题,我们设计了以单片机为控制、处理器的迈克尔逊干涉仪自动测量系统。
3 迈克尔逊干涉仪自动测量系统原理
系統原理如图3所示。将条纹检测和动镜位移两路信号同时传送给单片机,单片机处理计算后,将条纹数量N和动镜位移?d在液晶显示屏上动态显示。
以低速直流电机取代迈克尔逊干涉仪的微调手轮;光电编码器代替微调手轮上的刻度。
双轴直流电机的一侧轴通过联轴器与微调手轮轴连接,另一侧轴与光电编码器轴连接。直流电机带动微调手轮轴和光电编码器的码盘同步转动,使动镜在导轨上移动,光电编码器输出表征动镜位移的脉冲信号,将此信号经倍频电路输出更高分辨精度的标准脉冲,单片机接收此脉冲后自动计算动镜位移?d,并将动镜位移送液晶显示器动态显示。
如此改进完全省去了以手动方式旋转微调手轮带动动镜移动,以及从标尺读取动镜位置读数等人工操作,也避免了由于手动旋错微调手轮方向带入的回程误差,简化了操作过程。
使用光敏电阻传感器检测“吞”或“吐”的条纹个数,单片机获取信号后自动完成条纹计数,并将条纹数量实时显示在液晶屏上。
光敏传感器检测圆环中心光强变化,将检测信号进行滤波、波形转换和整形,以标准的脉冲信号传给单片机,单片机获取信号并自动完成条纹计数N。
在改进的过程中,我们遇到了光敏电阻受环境光强影响较大的技术难题。光敏电阻传感器接收到的光强是环境光强和激光干涉条纹光强的叠加,传感器输出电压是环境光强产生的基础电压和干涉条纹产生的周期波动电压之和。弱光环境下整体电压值较高,强光环境下的电压值相对于弱光整体偏低。通过对比,在不同的实验室中环境光强不一样,会导致基础电压差别很大。其次,光敏电阻的光照特性是非线性的,弱光环境下,灵敏度大,电压信号变化幅度大,容易检测,强光环境下灵敏度小,电压信号变化幅度小,很难检测。鉴于光敏传感器受环境光强影响较大,我们设计出了从光敏电阻传感器输出信号中分离环境光强,正确识别信号波动过程的电路,解决了以上难点。
由此,不仅解决了因连续人工计数条纹个数带来的计数错误,而且避免了长时间观察干涉条纹产生的眼睛疲劳。
光电编码器代替微调手轮的刻度。编码器输出的信号经倍频电路处理后,提高动镜位移的测量精度。
迈克尔逊干涉仪的微调手轮上有100个分格,最小分度为100纳米/格。我们选用1 000线光电编码器代替微调手轮的刻度,将传感器输出的两路信号经倍频电路进行二倍频处理,使光电传感器的码盘从10纳米/线进一步提升为5 纳米/线。因此,动镜位移的测量精度由微调手轮的100纳米/格,提高到光电编码器取代后的5纳米/线,动镜位移的测量精度大幅度提高。
4 迈克尔逊干涉仪自动测量系统的制作
4.1 选择元器件
根据原理图筛选系统所需直流电机型号、光电编码器、光敏传感器、单片机等元器件。实际测量实验过程中手动旋转微调手轮的速度,计算了带动微调手轮的转矩,以这两个数据为依据,确定电机型号[2]。考虑成本和测量精度,选取了1 000线的光电编码器[3]。对比了光敏电阻和光敏二极管,集成光电传感器等多种不同光敏元件传感器的实际效果,最终采用了光敏电阻传感器[4]。根据系统的功能及制作电路板的难度,选用89C52单片机作为控制、处理器[5],从实际需要显示的字符个数,比较了几种型号的显示器,选定12864液晶显示器[2],因实验环境光强较暗,选用独立触摸式发光按键等元器件。
4.2 安装电机、光电编码器和光敏传感器
采用3D打印,制作了直流电机、光电编码器的安装壳,以及光敏电阻传感器的安装支座。为了将直流电机和光电编码器安装在迈克尔逊干涉仪上,我们设计并3D打印了安装外壳。电机和光电编码器放在壳内,电机一侧轴通过联轴器与迈克尔逊干涉仪的微调手轮轴连接,另一侧与光电编码器连接,保证了直流电机带动微调手轮轴和光电编码器的码盘同步转动。光敏电阻安装在二维调节架上,调节架固定在3D打印的支座上,支座固定在观察屏支撑杆上,光敏电阻能够贴着观察屏二维自由移动。
4.3 制作迈克尔逊干涉仪自动测量仪
制作了集自动控制电机转动、自动测量干涉条纹数量和相应动镜位移,以及显示测量数据于一体的迈克尔逊干涉仪自动测量仪。自动测量仪如图4所示,该自动测量仪包含硬件和软件两大部分。
硬件部分包括开关电源、电机驱动、倍频、干涉条纹信号处理、单片机、键盘以及液晶显示器几个模块。
开关电源是将普通交流220 V电源转换成各元器件所需的直流工作电压。实验室电源为交流220 V,有时电压忽高忽低不稳定。而直流电机、液晶显示器、单片机等芯片的工作电压是直流电压,且工作电压各不相同,如直流电机工作电压为12 V直流电压,液晶显示器、单片机等芯片的工作电压为5 V直流电压。直流开关电源的功能就是将电能质量较差的原生态电源,如市电电源,转换成满足元器件工作要求的高质量直流电压。
电机驱动模块是控制直流电机工作的模块。通过触摸键盘输入命令,启动直流电机正转、反转工作或停止。
倍频电路将来自旋转编码器的两相脉冲信号做异或处理,输出2倍于输入信号的脉冲,用以提高动镜位移的检测精度。
干涉条纹处理模块是将光敏电阻传感器采集的干涉条纹原始信号进行滤波,得到比较干净的反眏干涉条纹的模拟电压信号,接着转换为数字信号,再将此数字信号继续整形为单片机可识别的标准脉冲信号。
单片机接收键盘输入的命令后,发出指令开启电机驱动模块启动直流电机工作,电机在转动过程中,带动动镜在导轨上移动,同时接收来自倍频电路表征动镜位移的高精度脉冲信号和干涉条纹处理模块产生的条纹脉冲信号,对两路脉冲同时计数、处理,得到动镜位移和条纹数量。
键盘由5个独立功能键组成,分别是up、down、conferm、riset、start/stop键,完成动镜移動方向、每组条纹数、测量组数、确认状态以及开始/停止工作命令的选择。
12864是图形点阵液晶显示器。开机后,它显示工作过程提示、键盘键入命令显示,以及测量干涉条纹数量和动镜移动位移的实时显示。
软件部分即单片机程序,指挥单片机按着预定的设计完成一系列动作,达到最终的测量目的。以逐差法处理数据为原则,设计程序框图如图5所示。
4.4 制作硬件电路
根据系统性能要求,设计了硬件电路,制作了以单片机为控制、处理器,12864液晶显示器,触摸键盘,开关电源及保护,电压转换与稳压于一体的硬件电路板。
5 迈克尔逊干涉仪自动测量系统
图6是最终制成的迈克尔逊干涉仪自动测量系统。此系统包括迈克尔逊干涉仪自动测量仪、电机与光电编码器和光敏传感器3个部分。电机取代了原有迈克尔逊干涉仪的微调手轮,光电编码器代替了微调手轮的刻度,光敏传感器代替人工识别条纹个数。
在观察屏上调出等倾干涉圆环后,调节二维架,使光敏电阻传感器的感光面移至圆环中心。打开迈克尔逊干涉仪自动测量仪背面的电源开关,按照液晶显示屏提示,从触摸键输入命令后,自动测量仪启动电机转动,带动动镜在导轨上移动,同时在自动测量仪的液晶显示屏上显示出“吞”或“吐”的条纹数量N和对应动镜位移?d,如图7所示,测量结束后,按UP或DOWN键查询条纹数和对应动镜位移,关闭所有电源,采用逐差法计算氦氖激光波长。
6 结 论
这套自动测量系统实现了自动测量干涉条纹数量以及自动计算动镜位移,并将其实时显示在液晶屏上,使测量过程更具有直观性。它减少了实验人员的工作量,降低了实验操作难度,测量准确度较改进前显著提高,改进成本较低。该自动测量系统适应环境光强能力强,工作性能稳定,可以应用到大学物理实验中。
参考文献:
[1] 袁长坤.物理量测量:第3版 [M].北京:科学出版社,2013.
[2] 程国钢,文坤,王祥仲,等.51单片机常用模块设计查询手册:第2版 [M].北京:清华大学出版社,2016.
[3] 杜清府,刘海.检测原理与传感器技术 [M].济南:山东大学出版社,2008.
[4] 刘迎春,叶相滨.传感器原理、设计与应用:第5版 [M].北京:国防工业出版社,2015.
[5] 蔡杏山.C51单片机C语言编程从入门到精通 [M].北京:化学工业出版社,2020.
作者简介:穆晓东(1967—),女,汉族,北京人,高级实验师,本科,研究方向:物理量测量。
收稿日期:2023-01-06