多操纵面气垫船的极区运动特性与控制方法研究
2023-06-03刘瑞琦李新飞韩端锋贾定睿尹蒙
刘瑞琦,李新飞,韩端锋,贾定睿,尹蒙
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
极地气垫破冰/运输船是一种兼具破冰与运输功能的新型极地装备,具有运载能力强、多栖性、航速高等特点[1-2],可为物资及人员转运/极地环境,监测等提供可靠平台,也可为结冰内河及渤海地区提供新的破冰装备,对提高我国极地科考保障能力和完善极地环境观测手段具有重要意义。不同于普通气垫船,极区气垫船在覆雪冰层上运动时,由于围裙与冰面的摩擦阻尼很小,气垫船在直航和回转操纵时,在侧风的影响下会产生较大的横漂或侧滑角。同时由于转艏阻尼力很小,严重时有可能产生“甩尾”现象,极难操控。而极地地形复杂,冰脊随处散布[3],在保证极区气垫船航行安全前提下,提高快速性及稳定性,有必要针对气垫船的极区运动特性和控制方法开展研究。
美国相比较重视气垫船运动学模型及其控制方法技术的研究工作,Cumming[4]在国际上较早针对全垫升气垫船气垫兴波特性开展研究,建立了全垫升气垫船的六自由度运动学和操纵动力学模型;Fein等[5]使用某型50 t气垫船的海试试验结果对气垫船在海洋环境中的动力学响应性能进行了分析,包括耐波性能、操纵和控制性能和气垫兴波性能;Kearns[6]针对LCAC气垫船的登陆过程中进行数值建模和仿真分析;Fu等[7]根据LCAC气垫船等缩尺比1∶6模型的海试试验数据,研究了LCAC气垫船的运动学仿真模型。Cook[8]以英国Griffon Model 1500 TD气垫船为研究对象,在南极洲上进行了气垫船模型试验测试,并分析了气垫船的极区运动性能。日本科学家村尾麟一[9]等设计了等缩尺比的模型,并进行了模拟冰面的模型试验,建立了气垫船冰面三自由度运动学模型。加拿大学者Murao等[10]研究了极区侧风条件下气垫船极易发生侧滑和甩尾,需要空气舵和船艏喷气装置相结合以解决侧滑和航向的稳定控制。国内学者张洪雨[11]和冀楠[12]对全垫升气垫船的六自由度运动学模型展开研究,分析了围裙系统的动力学特性和气垫兴波特性,并应用与气垫船仿真模拟器中。卢军等[13]研究了全垫升气垫船的航向稳定性。黄国梁等[14]研究了全垫升气垫船操纵运动研究。付明玉等[15]对气垫船操纵性能进行了深入的理论分析。总之,目前由于气垫船运动极其复杂、控制难度高,或由于技术保密原因,国外极少公开针对极区气垫船运动控制进行研究的文献和资料。国内专家和学者主要是针对常规气垫船运动学模型和控制问题开展相关研究,目前没有关于极区气垫船运动学模型和极区操纵控制方法的相关研究成果,特别是针对具有矢量喷管气垫船运动控制的相关研究报道。
本文研究对象是一种具有极地运输和破冰能力的多功能气垫船。该气垫船的主尺度参数长为12.6 m,宽6 m,满载排水量18.5 t,主推进装置为2台空气导管螺旋桨,航向控制装置为2部空气舵,同时在国内气垫船上首次安装了2台船艏矢量喷管,以提高冰面抗侧滑控制能力。本文根据气垫船在极区敷雪冰层上的运动特点和难点,设计一种适合多操纵面的极区气垫船的运动控制及多操纵面协调分配控制系统,分析极区气垫船的安全操纵边界包络限界,研究极区气垫船的轨迹跟踪导引及控制策略。
1 极区气垫船的运动学模型
1.1 气垫船的运动学模型
描述气垫船六自由度运动的方程,基于2个基本坐标系:固定于地球的固定坐标系(大地坐标系,通常认为北东坐标系)和固定于船体的运动坐标系(船体力学坐标系),如图1所示。
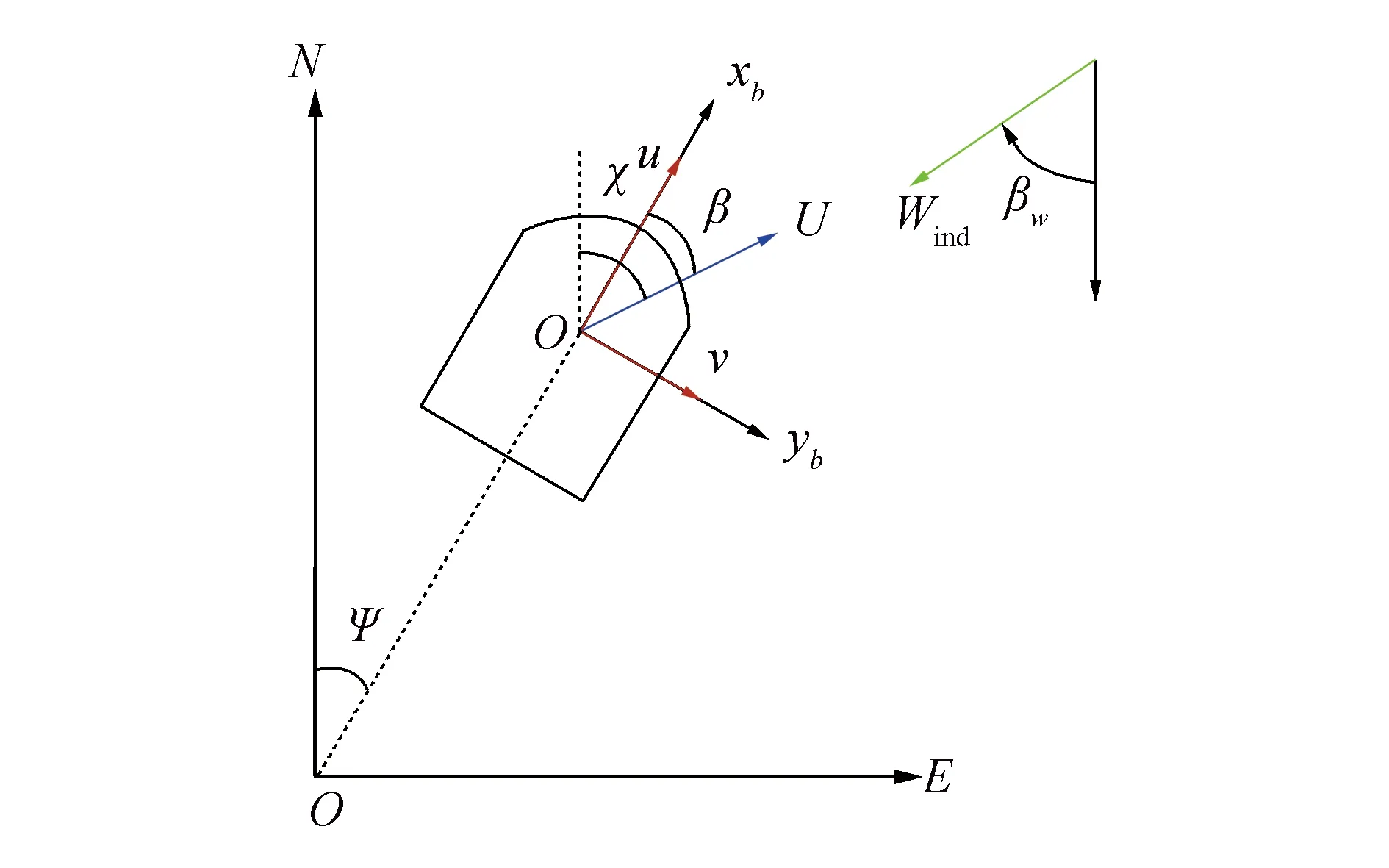
图1 NED坐标系和船体坐标系Fig.1 NED coordinate and body coordinate
大地坐标系也称北东坐标系NED,采用操纵性习惯用法,坐标系为右手坐标系,ON轴指向北方,OE轴指向东方,OD轴垂直于静水面,并以垂直向下为正,NOE平面与海平面重合,坐标原点O取t=0时刻船体力学坐标系原点处(或指定地理坐标点)。
船舶本体坐标系oxbybzb(船体坐标系)的原点o取在船体及装载质量的重心位置,oxb轴垂直于舯横剖面,以指向船艏为正,oyb轴垂直于舯纵剖面,以指向右舷为正,ozb轴与刚性底板平面垂直,以指向船底为正。
本文采用船体坐标系,三自由度坐标系下,北东坐标系下速度与该坐标系下速度的转换关系为:
(1)

船体坐标系下,若以船体中心为坐标原点,则六自由度运动方程为:
(2)
气垫船在极区敷雪冰层上运动时,假设在纵摇、横摇和垂荡运动可以忽略,六自由度运动学模型可以进一步简化为三自由度运动模型:
(3)
其中:
(4)
式中:X∑、Y∑、N∑分别代表纵向力、横向力、艏摇力矩;下标c、fr、T、No、r分别表示风载荷、冰面摩擦载荷、导管空气螺旋桨推力、矢量喷管推力、空气舵操纵力。
1.2 极区冰面摩擦阻力模型
气垫船在冰区航行时,气垫和围裙主要受力为冰面发生变形产生的兴波阻力和气垫围裙与冰雪表面的摩擦力。其中,冰面兴波阻力是指气垫船在被冰层覆盖的水域航行时,冰层受移动气垫压力影响出现变形引起的[3],本文主要研究气垫船极地冰区航行的操纵性,冰层下为陆地,因而冰层不会在气垫压力作用下出现变形,可以忽略兴波阻力。气垫船的冰雪面摩擦阻力主要为围裙与冰面的摩擦力。在极区环境下,冰面上通常被坚硬的雪所覆盖,因而在研究围裙在冰区的摩擦力时,实质为研究围裙与坚硬雪层的摩擦阻力。气垫船在极区应用时,主要目的是将物资从运输船转运至科考站,运输路线相对固定,地表情况主要为被坚硬雪层覆盖的冰[1],因而冰雪面摩擦阻力为气垫围裙与坚硬雪层之间的摩擦力。假定航行过程中,纵倾角度保持不变,则可以认为摩擦阻力与航速无关,则气垫船摩擦力和力矩计算为:
Xf=CxW,Yf=CyW,Nf=CnWLc
(5)
为了获得极地气垫船冰区摩擦系数Cx、Cy和Cn,以及其与漂角、垫升高度等参数的相关关系,参照村尾麟一[9]南极气垫船模型的冰面摩擦系数试验结果中的冰面摩擦系数,可以得到极地气垫船冰区航行的摩擦力,如图2所示。
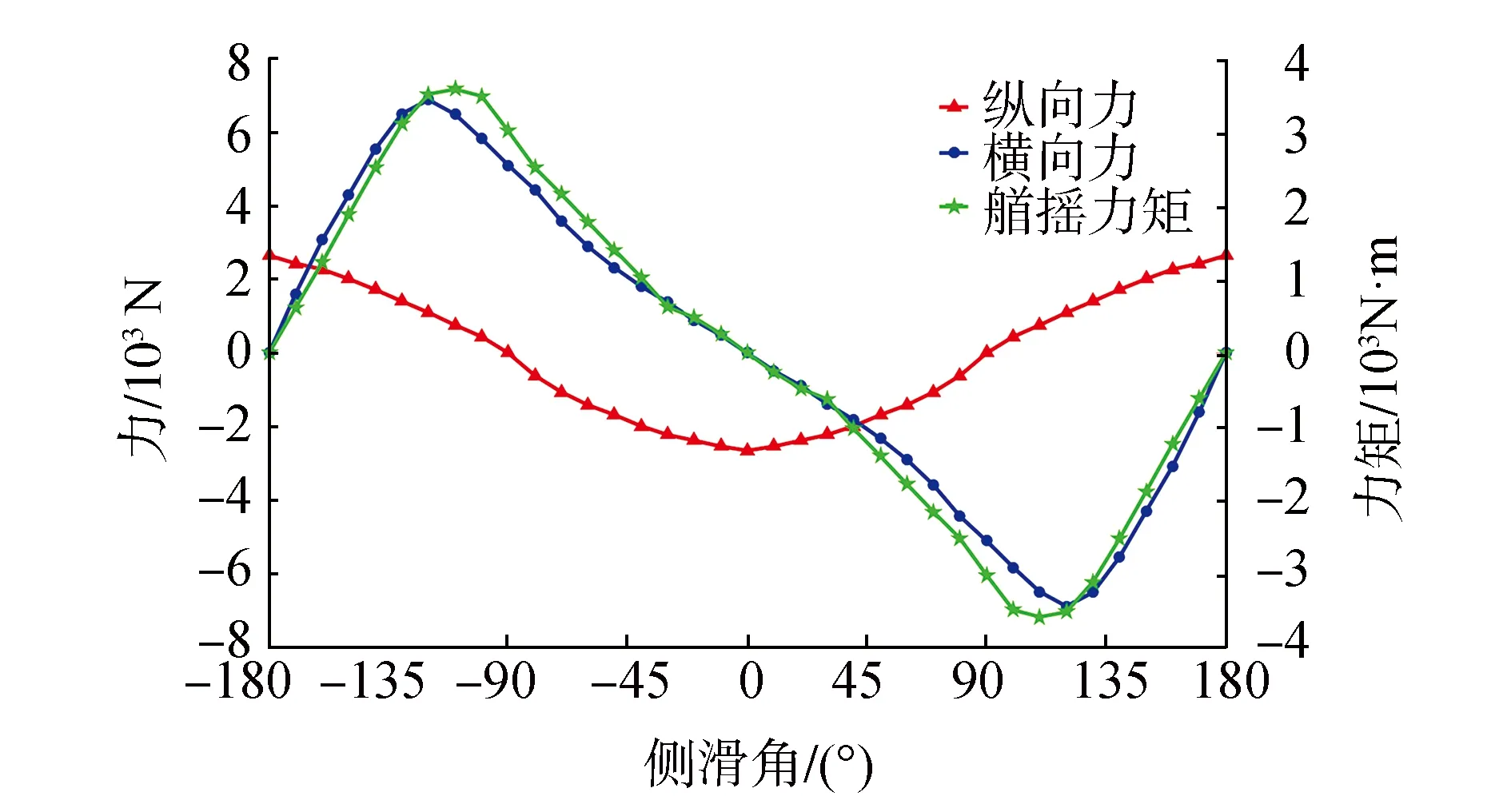
图2 不同侧滑角下的冰面运动阻力Fig.2 Motion resistance on ice surface at different sideslip angles
构建的冰面摩擦力仿真模型,设气垫船漂角(侧滑角)为-180°、-150°、-120°、-90°、-60°、-30°、0°、30°、60°、90°、120°、150°、180°,输入冰面摩擦力仿真模型,可以得到气垫船的摩擦力,如图2所示。从图中可以看出不同漂角下的冰面摩擦力曲线和气动力系数曲线有相同的趋势。结合式(5)可以看出冰面摩擦力只与运动漂角有关,与气垫船的其他运动参数无关,固定运动漂角下的冰面摩擦力存在最大值。纵向摩擦力在漂角为0°或180°时最大,横向摩擦力和艏摇摩擦力矩都在漂角120°附近有最大值。
1.3 极区风载荷模型
气垫船的气动力是通过风洞试验或者模拟风洞试验得到的,为了简化实验,一般会忽略气垫泄流空气动量力和气垫进气动量力。模拟风洞试验得到的不同气漂角下的气动力系数[16],如表1和图3所示。
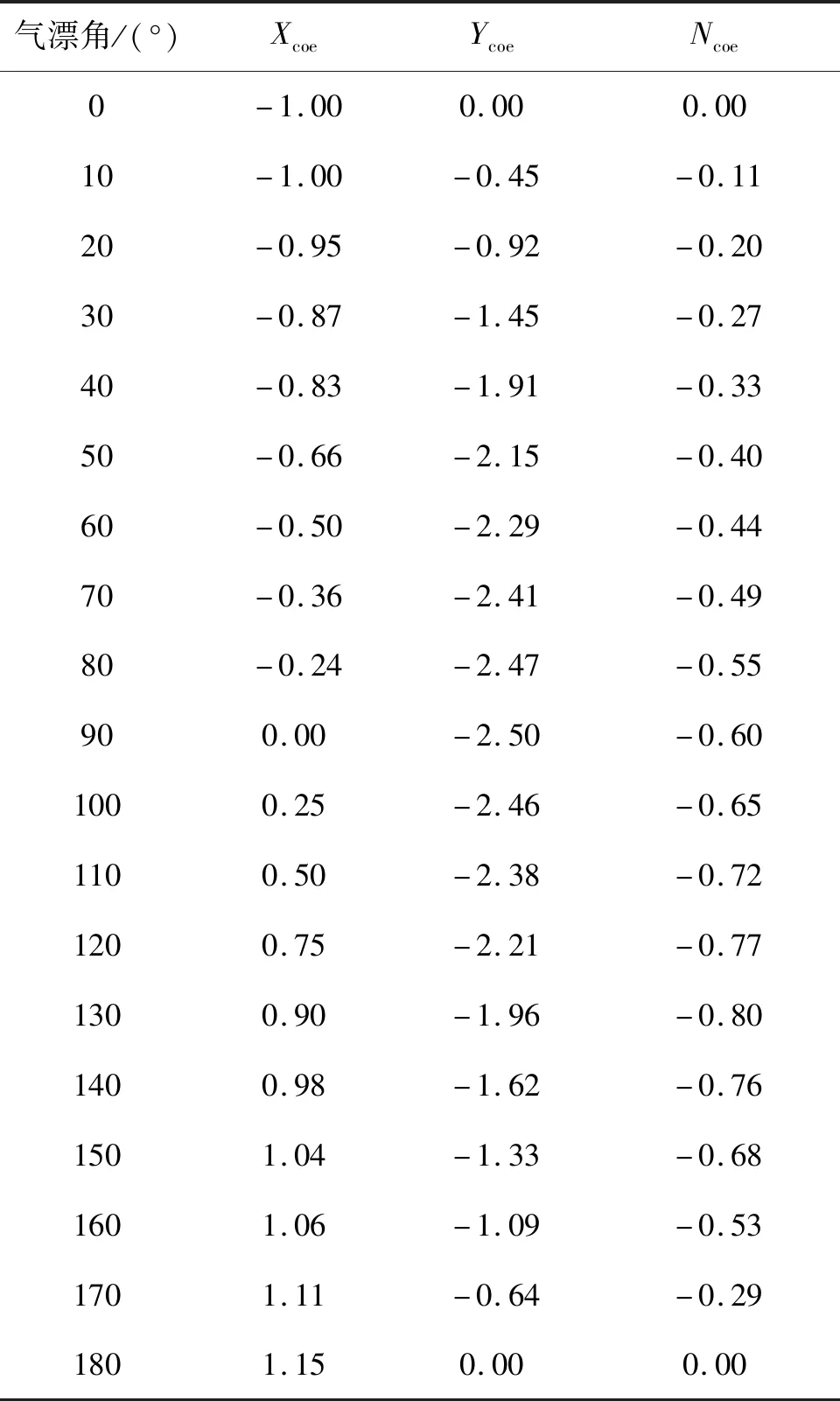
表1 不同气漂角下气动力系数Table 1 Aerodynamic coefficients at different drift angles
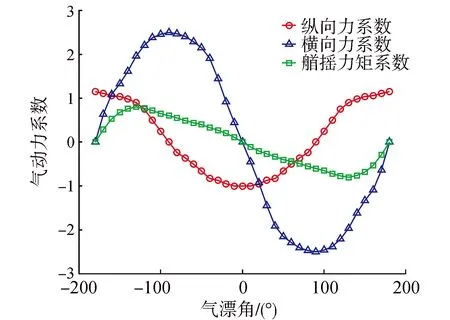
图3 不同气漂角下气动力系数Fig.3 Aerodynamic coefficients at different air drift angles
在任意气漂角下的气动力系数都可以根据表1插值得到。
2 操控系统动力学模型
2.1 推进与驾控系统的安装布置
极区气垫船的推进与操纵系统布置如图4所示,主要包括:2台位于船艏的矢量喷管、2台位于船艉的空气导管螺旋桨以及2组位于空气导管螺旋桨后方的空气舵,这6个装置构成了气垫船的6个操纵面。
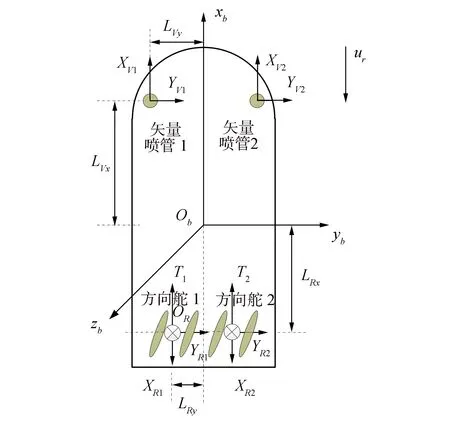
图4 推进与操纵系统安装布置Fig.4 The layout of the propulsion and manipulation system
2.2 导管空气螺旋桨
极区气垫船的主推进系统由2台导管空气螺旋桨组成,两侧左右对称布置。
导管空气螺旋桨输出的推力与自身螺距角和转速有关,也与外部的相对风速有关,具体计算公式为:
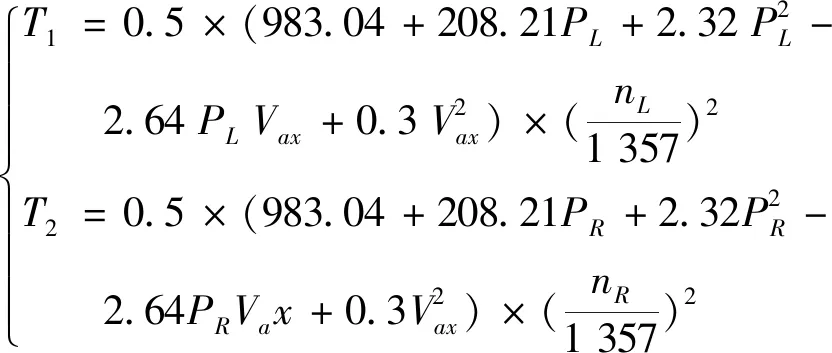
式中:T1、T2为气垫船分别受到左、右两侧空气桨的力,N;PL、PR为左、右两侧空气桨的螺距角,(°);Vax为纵向相对风速,m/s;nL、nR为左、右两侧空气桨的转速,r/min。
气垫船受到空气桨在xb方向的纵向推力为:
XT=T1+T2
(7)
在yb方向的横向推力为:
YT=0
(8)
平台受到的转艏力矩为:
NT=L1y(T1-T2)
(9)
2.3 船艏矢量喷管
艇艏喷管是一个很有利的操纵面,可360°自由旋转,产生各个方向的推力,如图5所示。喷管由下部的双头出口蜗壳供气,向外喷出高速高压的气流产生反作用力来操纵气垫船。
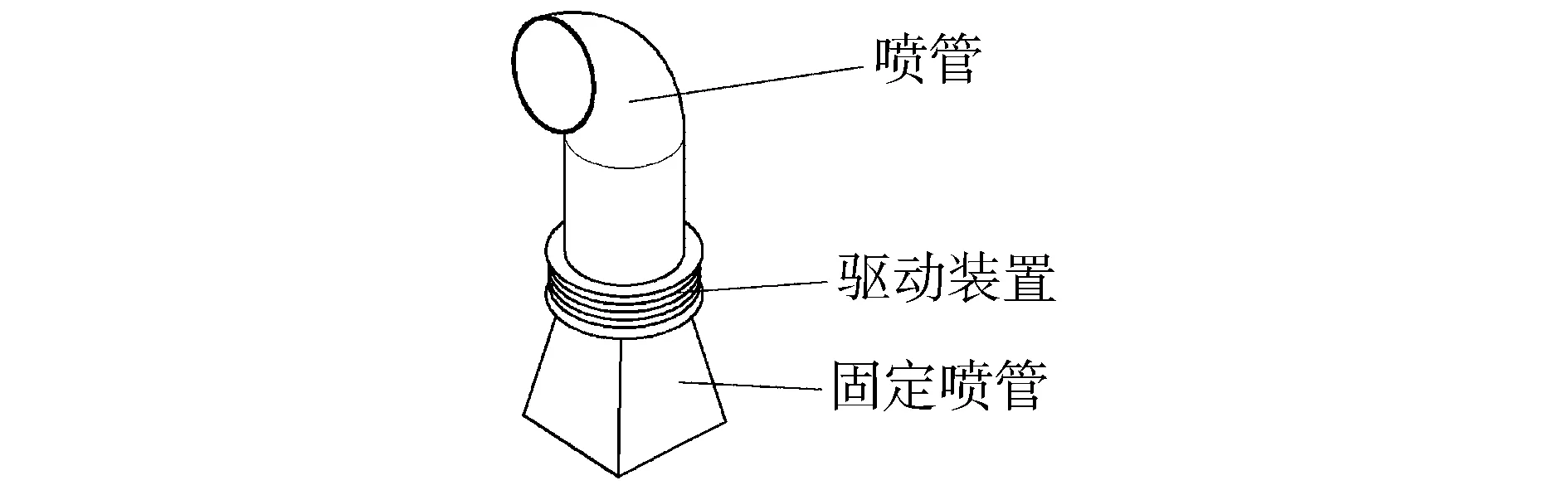
图5 平台艏部矢量喷管Fig.5 Vector nozzle of the hovercraft
气垫船受到矢量喷管的纵向力:
XNo=TNogcosθM
(10)
气垫船受到矢量喷管的横向力:
YNo=TNogsinθM
(11)
气垫船受到矢量喷管的艏摇力矩:
NNo=XNoyv+YNoxv
(12)
式中:TNo为喷管对气垫船输出推力;g为重力加速度;θM喷管旋转角度。
2.4 空气舵
导管空气螺旋桨后的气流喷速远高于气垫船的航速,仅需要较小的舵面积就可以满足操纵性需求,因此桨后空气舵也是气垫船的主要操纵面之一。
气垫船有4个空气舵,2个为一组,且艇艉左右两侧各一组,位于空气桨的正后方,关于xb轴对称。
舵力与舵的来流速度Vre、空气螺旋桨推力及气垫船相对风速有关。
若螺旋桨推力Ti≥0:
(13)
若螺旋桨推力Ti<0:
(14)
式中:下标i=1表示左舵,i=2表示右舵,下同;ρa为空气密度;Vax为沿船舶纵向的风速。一般来说,当螺旋桨推力为负时来流速度Vre很小,可以忽略不计,既Vre=0;Sd为导管面积。
舵的气动压Pr(Pa):
(15)
单侧舵产生的纵向力:
Xri=2PriSdcxi
(16)
式中Sd为单空气舵面积,m2。
纵向力:
Yri=2PriSdcyi
(17)
艏摇力矩:
(18)
空气舵的合力:
(19)
3 极区气垫船的运动控制方法
3.1 多操纵面气垫船的运动控制体系
极区气垫船在覆雪冰层上高速运动时,由于围裙与冰面的摩擦阻尼很小,气垫船在转向操作时,会产生较大的横漂,严重时有可能产生“甩尾”现象,极难控制。在路径跟踪过程中,由于侧风的影响,气垫船容易偏离航向,特别是气垫船的摩擦阻力极小,气垫船极易偏离预定轨迹,而极地地形复杂,冰脊随处散布[3],气垫船极易发生不可预测的危险性。
为了增加气垫船的极区操纵性,在船艏两舷增加有2台矢量喷管,这样极区气垫船有6个操纵面,分别是2台空气导管螺旋桨、2组空气舵和2台船艏矢量喷管,这是一种典型的多操纵面矢量控制系统。气垫船在低速操纵时,由于2组空气舵舵效较低,无法输出有效舵力,导致船艉没有相应的操纵力,这样极区气垫船又是一种典型的欠驱动系统。对于这样一种具有多操纵面的欠驱动系统,很难用传统的过驱动推力分配方法去解决多操纵面的推力分配问题,特别是对于具有空气舵这样的操纵面的运动控制系统。
目前,一些气垫船设计已经证明,合理安装和使用矢量操纵面(例如艏喷管)可以提高气垫船的机动性,因此有必探明矢量操纵面的设计和使用思路。为了实现这样一种具有多操纵面的欠驱动系统的控制分配,并降低控制分配的设计难度,本文提出了如下几种设计方法。
1)2台空气螺旋桨同步控制,以减少一个操纵面。
2)2组空气舵(4片舵叶)同步控制,以减少一个操纵面。
3)2台矢量喷管同步控制,以减少一个操纵面。
这样具有6个操纵面的气垫船,简化成一个具有3个操纵面的运动控制系统。气垫船在极区运动操纵过程中,为了保证高速性和安全性,气垫船在控制航速时,还需要同时控制航向,并抑制出现过大的侧滑角。为此本文提出了如下控制系统的体系结构:
1)整个气垫船运动系统分为3个控制回路,分别是航速控制回路、航向控制回路和侧滑运动控制回路。
2)将2台空气螺旋桨分配给航速控制回路,实现纵向速度的实时控制。
翻转课堂(flipped classroom,简称FC)是指通过借助现代教育技术手段预先录制授课视频来取代传统的课堂知识讲授,并在网络上进行共享,要求学生课前自主观看学习,然后利用课堂时间集中解决学生在观看视频时所产生的困惑和疑问,实现知识内化的一种教学形态[1]。翻转课堂最早起源于美国[2],自2011年起翻转课堂作为新时期教学模式的重大变革被逐步推广,近年来在我国的基础教育领域受到许多教育学者的重视,并开始在我国逐步推广[3]。
3)将2组空气舵分配给航向控制回路,实现船舶艏向角的实时控制。
4)将2台船艏矢量喷管分配给侧滑控制回路,实现船舶侧滑运动的实时控制。
气垫船的运动控制系统框图如图6所示。
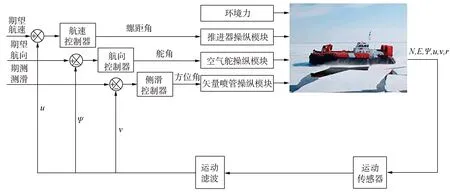
图6 气垫船的运动控制系统框图Fig.6 Block diagram of motion control system for air cushion platform
整个气垫船控制系统由航速自动控制回路、航向角自动控制回路和侧滑运动控制回路组成。首先设定气垫船的期望值,控制器根据期望值与船舶传感器反馈的状态和运动信息的偏差分别计算出主推进器螺距角、舵角以及矢量喷管方位角,然后输入相应的推进器,产生的力作用在气垫船上,使气垫船以期望航速、航向和侧滑角航行。
3.2 极区气垫船的路径导引方法
视线导引法通过在2个路径点连接线段上寻找一个视向导引点(LOS)来实现气垫船路径导引。把从气垫船当前的位置点到视向导引点的连线向量定义为LOS向量,该向量与北东坐标系的夹角ψd为目标航向角。
路径导引方式采用视向导引向量法(LOS vector)[17],视向导引向量和气垫船本体坐标系中纵轴xb轴平行。
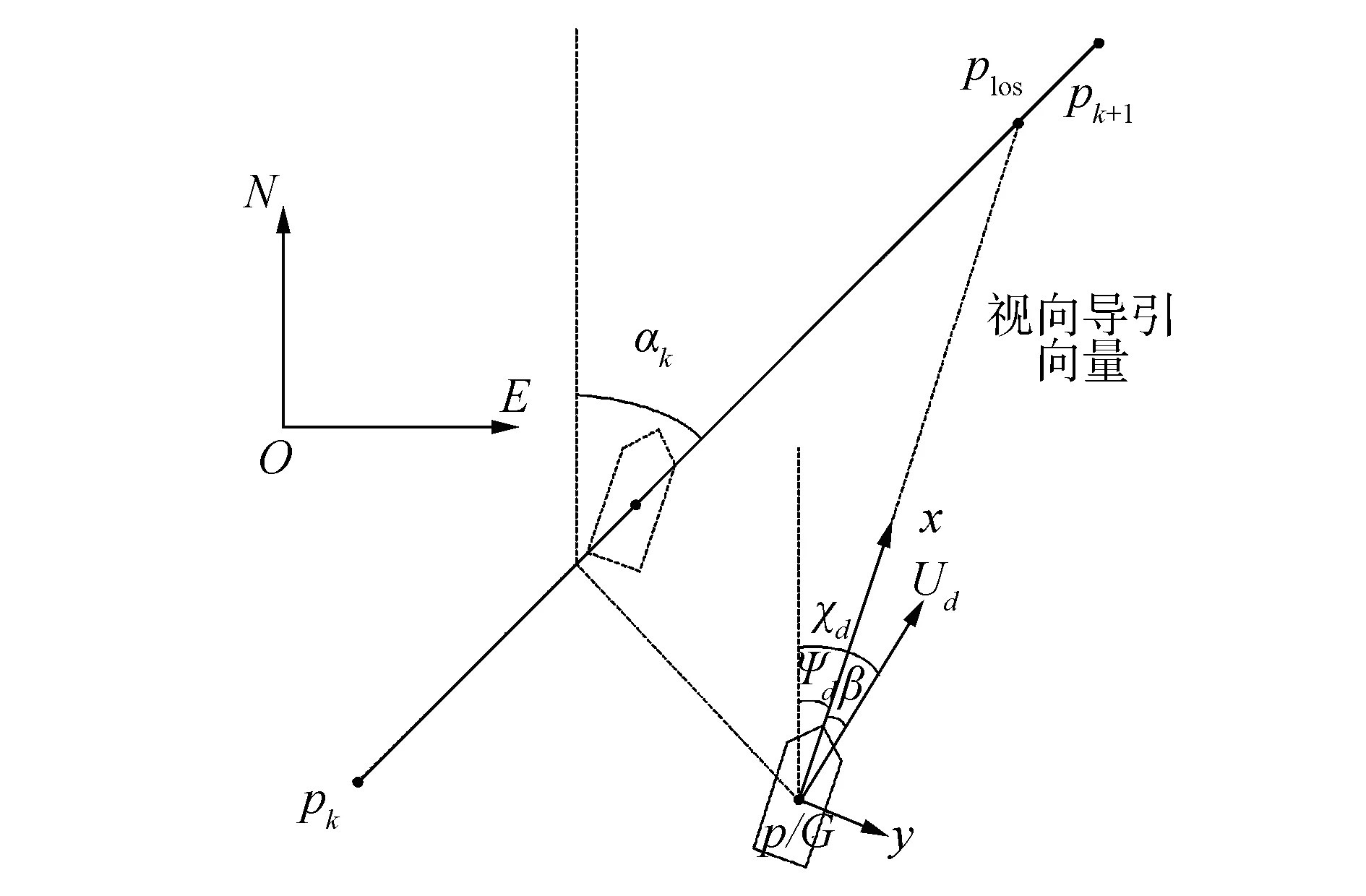
图7 直线段路径跟踪算法Fig.7 Straight line path tracking algorithm
气垫船规划路径由航迹点P(k)=(Nk,Ek)构成,在t时刻气垫船在北东坐标系下的位置坐标为Pt=(Nt,Et)。以坐标Pt为圆心,以R为视向半径画圆,该圆与直线路径PkPk+1的交点之一(离Pk+1最近的点)作为视向点Plos=(Nlos,Elos)。
从图7可以看出,有:
χd=ψd+β
(20)
气垫船理论轨迹角满足:
(21)
期望航向角为:
ψd=atan 2(Elos-Et,Nlos-Nt)
(22)
航向角误差为:
(23)
视向导引点的北东位置Plos=(Nlos,Elos)满足:
(Nlos-Nt)2+(Elos-Et)2=R2
(24)
(25)
可以求出极区气台直线导引过程中的视线导引点Plos=(Nlos,Elos)。
船舶侧滑角为:
(26)
航向角误差为:
(27)
4 极区运动操纵与控制仿真分析
4.1 极区冰面运动特性分析
1)有侧风条件下的直航运动特性。
侧风条件下,气垫船初始纵向速度为10 kn,初始艏向角为0°,空气导管螺距角为6°。打开航向控制器。设定气垫船期望艏向角为0°,风向角为-40°(西北方向),风速分别为3、4、5 m/s,分析该状态下,气垫船在不同风速下的直航运动特性如图8。
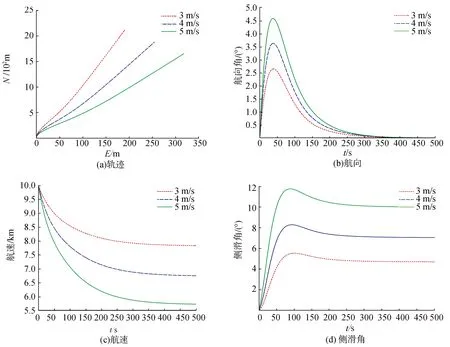
图8 气垫船在不同风速下的直航运动特性Fig.8 Direct sailing motion characteristics of hovercraft under different wind speeds
图8分别为无侧滑控制不同风速下气垫船航迹、航向、航速、侧滑角变化。分析可知,有侧风情况下,即使有航向自动控制功能,气垫船可以保证航向趋近稳定,但气垫船仍然容易发生侧滑,且风速越大,对航速影响越大,产生的侧滑角也越大,对气垫船的航向安全会产生较大影响。
2)无风条件下的低速回转特性。
设置风速为0 m /s,初始航速6 kn,螺距角为4°,舵角分别为10°、15°、20°,喷管方位角为0°,进行气垫船回转仿真。气垫船运动过程的各运动参数如图9所示。
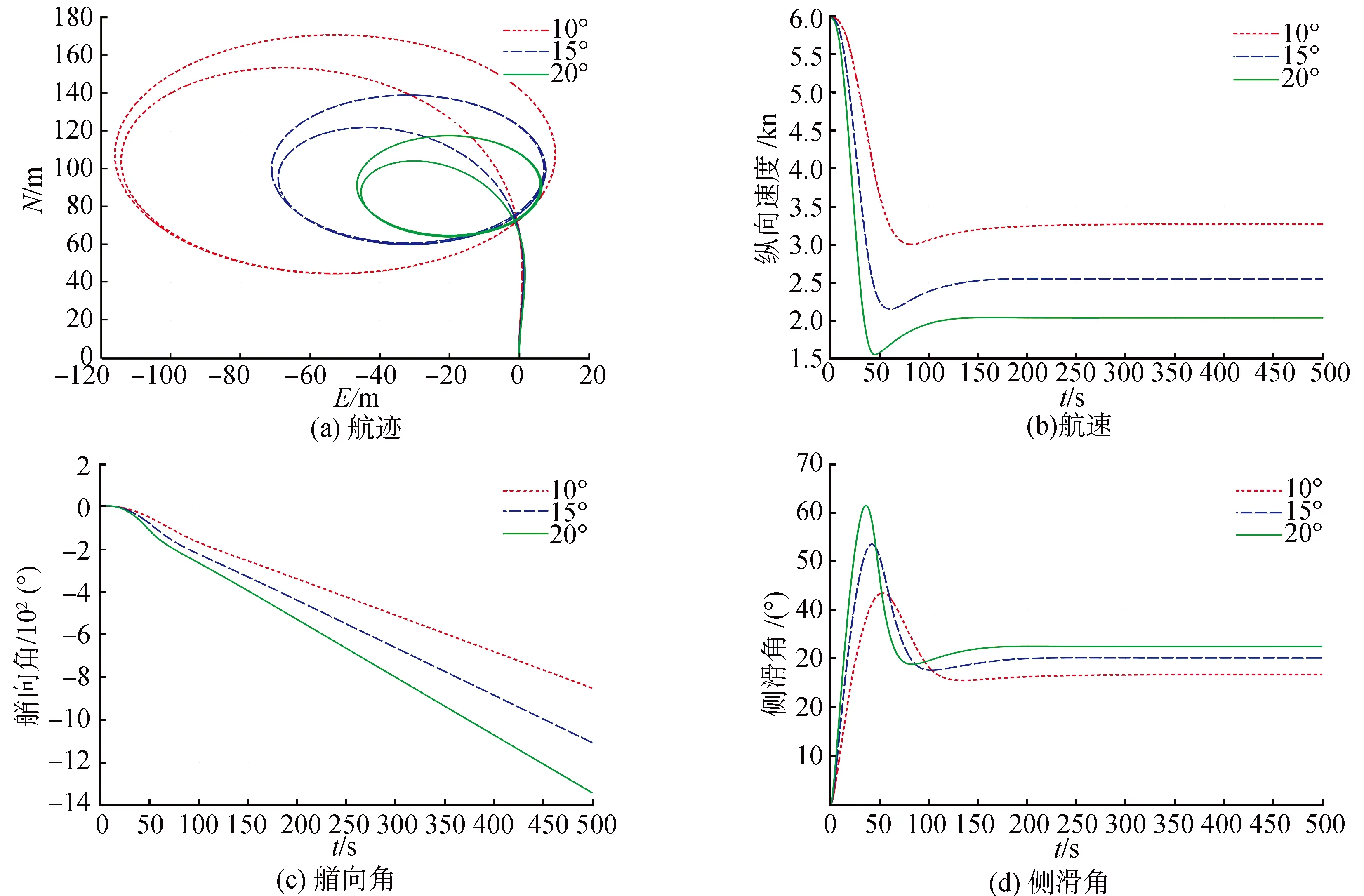
图9 无风条件下的气垫船低速回转特性Fig.9 Low speed rotation characteristics of hovercraft under calm conditions
图9为无风无侧滑控制条件下,不同风速下气垫船低速回转航迹、航速、艏向角变化、侧滑角变化。分析可知,无风条件下,气垫船即使在低速回转,也极易发生侧滑和甩尾等情况,甚至导致危险的“陀螺”运动状态,气垫船失控,且舵角越大,相应侧滑角越大,回转半径越小,回转速率越慢,也容易失控。
4.2 极区有风条件下的路径跟踪控制仿真
设置风速为3 m /s,风向角为-40°(西北方向),气垫船初始位置为北东坐标系原点,初始艏向角为0°,初始航速为0 kn。路径导引模块设置:目标点坐标Pk+1=(3 000 m,3 000 m),导引点坐标Pk=(100 m,100 m),打开航向控制器和侧滑控制器,仿真结果如图10所示。
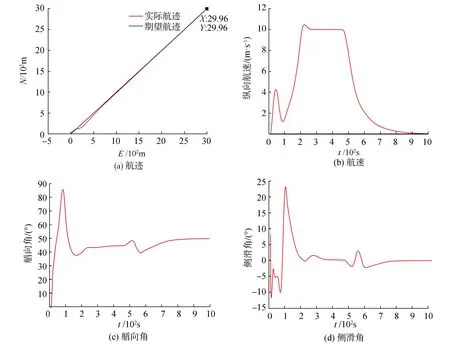
图10 气垫船路径跟踪仿真运动特性Fig.10 Motion characteristics of hovercraft path tracking simulation
气垫船路径跟踪仿真轨迹如图10(a)所示,设置导引点坐标(100 m,100 m),在从起点到导引点阶段由于受到风速影响,其轨迹成非线性曲线状,从导引点到终点阶段气垫船轨迹近似为直线,且与期望的轨迹路径近似重合,实际终点处(2 996 m,2 996 m)与期望终点(3 000 m,3 000 m)的误差也小于1%。
气垫船路径跟踪仿真过程航速如图10(b)所示,在从起点到导引点阶段航速变化受风速影响为非线性先增速再减速的过程。从导引点到终点阶段气垫船航速变化分为加速段、匀速段和减速段部分,最后航速近似为零,保证气垫船在终点处停下来。仿真过程中气垫船艏向角变化如图10(c)所示,侧滑角变化如图10(d)所示。由图可知,在起点到导引点阶段,艏向角近似线性增加到85°左右,过了导引点之后艏向角逐渐减小至约45°,即导引点到终点路径的夹角,并持续保持在45度上下,到最后终点处达到约50°。而侧滑角在起点到导引点阶段逐渐增大至约23°,之后除小幅摆动外,逐渐减小到保持0°左右。
根据图10可知,有侧风条件时,加上航向自动控制功能和侧滑角控制功能,可以使气垫船基本保持直线路径跟踪。路径跟踪误差小于1%。
4.3 极区有风条件下的直航抗侧风能力分析
侧风条件下,气垫船初始纵向速度为10 m/s,初始艏向角为0°,空气螺旋桨在额定转速1 357 r/min下运行。打开纵向航速控制器、航向控制器和侧滑控制器(侧滑控制器参数:kpv=0.2,kiv=0.01,kdv=0)。设定气垫船期望艏向角为0°,期望速度10 m/s,风向角为-40°(西北方向),风速分别为3、4、5 m/s,分析在3个控制器同步工作下,气垫船在不同风速下保持航向、航速以及避免侧滑的性能。气垫船运动过程的各运动参数如图11所示。
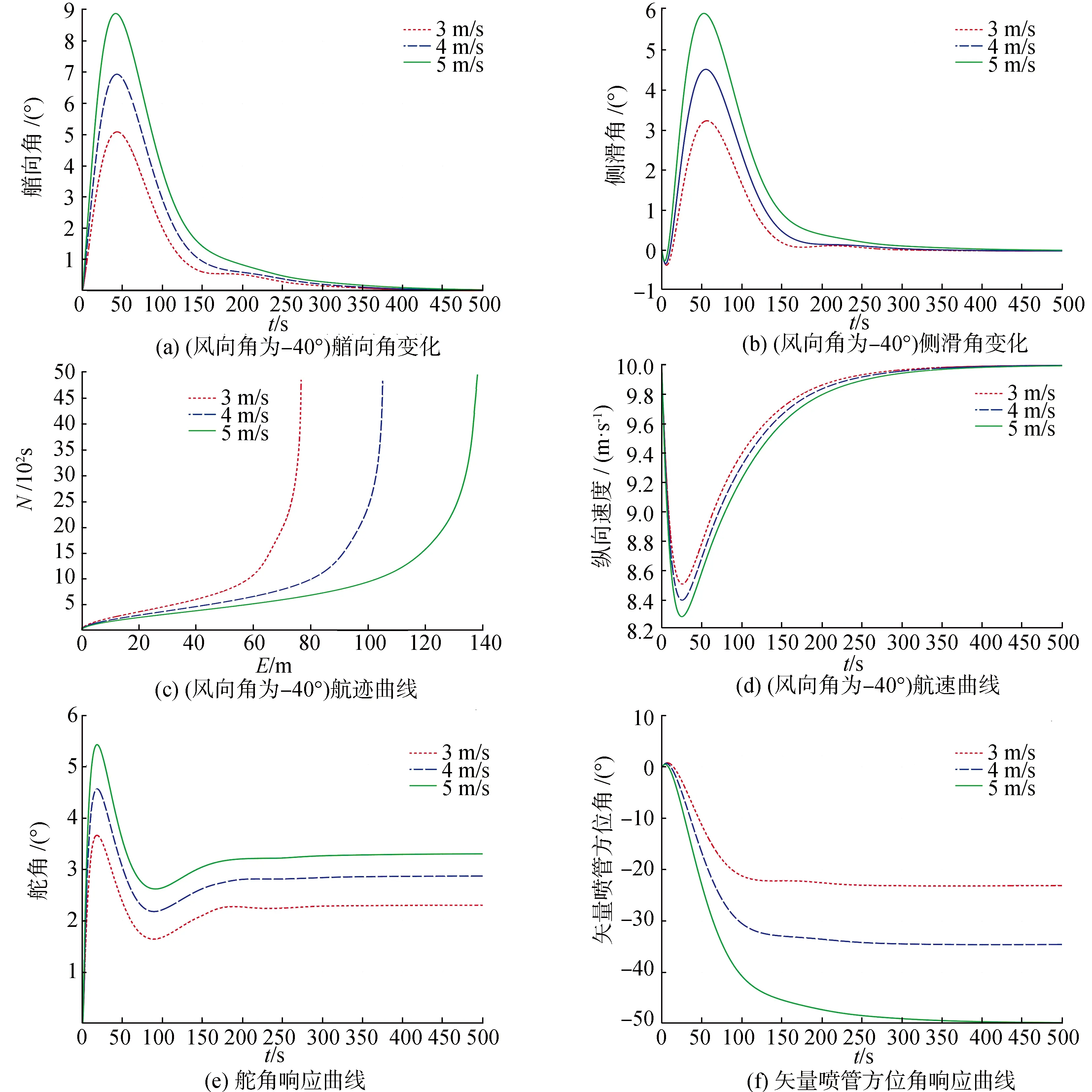
图11 不同风速下气垫船运动参数曲线Fig.11 Variations of motion parameters of hovercraft under different wind speeds
艏向角在不同风速下的变化曲线如图11(a)所示。风幅值越大,气垫船航向角偏移越大,当风速为5 m/s时,气垫船航向角最大偏移约为9°。在航向控制器的调节下,气垫船航向角都趋近于零,实现了5 m/s风速下航向角的保持。
侧滑角的变化曲线如图11(b)所示。风速越大,侧滑角越大,当风速为5 m/s时,气垫船侧滑角最大约为6°。在侧滑控制器的调节下,气垫船侧滑角都趋近于0,不再产生侧滑。不同风速下的航迹曲线如图11(c)所示,气垫船因产生侧滑,航迹向东向(E)偏移。当风速为5 m/s时最大偏移距离约为140 m,但在航向控制器和侧滑控制器的作用下及时调节航向且抑制侧滑,使气垫船趋势保持向正北方向前进。航速图如图11 (d)所示,在初始阶段受到风速影响,纵向速度迅速降低。当风速为5m/s时,纵向速度下降最低至约8.3 m/s,然后在航速控制器调节下逐渐维持至接近期望速度10 m/s。舵和矢量喷管的响应如图11(e)和(f)所示。随着风速的增加,舵和矢量喷管的角度逐渐增加,且最大值都没有超过输出极限。当风速为5 m/s时,舵角度最大值约为5.3°,最终稳定在3.3°;矢量喷管的最大角度约为-50°。在存在侧风干扰时,为了实现航向保持,可以通过调节空气舵来保持航向的稳定性;为了实现侧滑运动和侧滑角的抑制,需要通过船艏矢量喷管的旋转角度实现气垫船侧滑运动的调节。当风速达到5 m/s时,气垫船的侧滑角稳定住以后,船艏矢量喷管的角度小于90°,满足气垫船使用条件的设计要求。
在不同风向角下(绝对风向角),调节风速大小,对气垫船的抗侧风能力进行仿真。通过多次仿真,可以得到在气垫船在0°~180°风向角下能够抵抗的最大风速,如表2所示。由于气垫船左右舷对称,所以-180°~0°风向角下的抗侧风能力与0°~180°风向角相同。
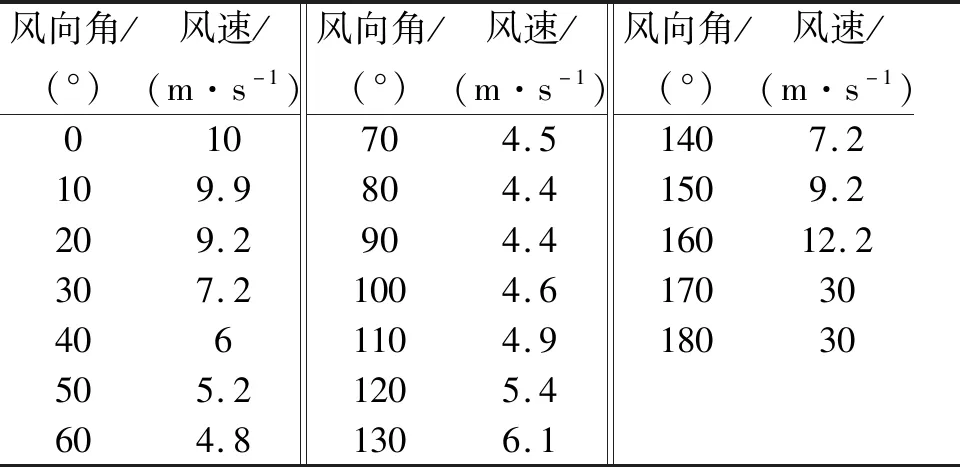
表2 不同风向角下抗侧风能力Table 2 Crosswind resistance under different wind directions
图12为不同风向角下能抵抗的最大风速,在风向角从0°~90°所能抵抗最大风速逐渐减小,90°以后到160°左右逐渐增大,当超过170°以后船抵抗风速增为最大值。即抵抗横向侧风能力最弱,当超过一定角度后,船为顺风状态,此时侧风对船的侧滑影响可忽略不计。
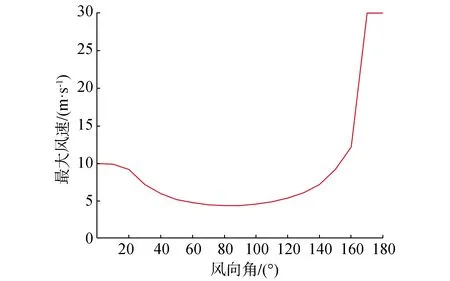
图12 不同风向角下极区气垫船抗侧风能力Fig.12 Anti crosswind capability of polar region hovercraft under different wind direction angles
5 结论
1)建立了极区气垫船的敷雪冰层上的运动学模型,可知极区气垫船在极区有风条件下直航和回转运动,极易发生侧滑和甩尾运动,甚至失去控制,为了保证气垫船的可操纵性和安全性,不但需要控制航速和航向,还需要同时控制侧滑角速度。
2)本文所提出的一种多操纵面极区气垫船控制体系结构,实现了极区气垫船的多操纵面协调分配控制,可在在极区有风条件下控制纵向运动速度时,可同时的控制气垫船的航向,并同时较好地抑制了侧滑运动。
3)在极区有风条件和有侧滑角控制时,对极区气垫船直航时的抗侧风运动特性进行了仿真分析,得出了极区气垫船抗侧风的能力曲线。
