带支撑物真空玻璃的四点弯曲实验数值分析*
2023-06-01刘庆雨王其远李嘉新班宇恒王彦生
刘庆雨,王其远,李嘉新,班宇恒,王彦生
(1.河南科技大学土木建筑学院,河南 洛阳 471023;2.河南科技大学车辆与交通工程学院,河南 洛阳 471023)
随着建筑、汽车、装饰装修和家具等其他行业的发展和人们对生活空间环境要求的提高,安全玻璃、节能真空玻璃等功能性加工产品得到广泛应用。真空玻璃利用保温水杯原理,基本消除了因空气传导和对流而引起的热传输,提高了玻璃构件的隔热性能。另外,真空玻璃还具有防结露结霜、抗风压、隔声等功能。因此,真空玻璃是继单片玻璃、中空玻璃后,备受国际推崇的第三代节能建筑材料,是近期和未来玻璃领域重要发展的战略材料之一[1]。
带支撑物的真空玻璃以2块钢化玻璃基板为主体,在2 块玻璃之间放置支撑物,再将玻璃中间抽成真空状态,并进行严格的密封。因带支撑物的真空玻璃具有复杂的制作工艺,所以在制作中存在着很多技术难关[2-3],比如在玻璃板的制造中要选择合适的真空度和封接方式,在支撑物的选择和排布方式上也有许多问题需要考虑[4]。因此,对带支撑真空玻璃结构的强度分析[5-7]等方面进行研究是十分重要的。
通过理论分析、数值模拟和实验验证的方法,探索合理的结构设计,优化真空玻璃内部应力,降低环境温度、风载荷、振动及冲击载荷等作用对真空玻璃的不利影响。针对强度分析和应力诱导真空玻璃破裂的问题,英国ULSTER 大学的SIMKO 等[8]构建了含有支撑和封边的完整有限元模型,分析了低温封边技术在真空玻璃内部产生的应力;WULLSCHLEGER 等[9]采用3 种不同类型的钢化真空玻璃模型,研究了支撑物对钢化真空玻璃横向剪切刚度和挠度的影响;蔺海晓等[10]采用赫兹接触理论,对钢化真空玻璃球形支撑压痕应力场进行了分析;蔡冬等[11]基于弹性理论和ANSYS 分析了支撑物缺位对弧面钢化真空玻璃支撑应力的影响;李彦兵等[12]分析了支撑点间距对钢化真空玻璃力学特性的影响;刘小根等[13-15,3]对真空玻璃的支撑压痕控制准则、温差作用应力、风压作用应力、支撑物缺位影响、真空玻璃结构优化及工程应用理论等方面也进行了较详细的探讨,有力支撑了真空玻璃新产品研发及其结构优化与工程应用。但以上分析结果均未涉及实验验证方法,从而忽视了真空玻璃在实际载荷作用下的强度分析及全场变形。
本文基于Solidworks 与ANSYS Workbench 建立带支撑真空玻璃有限元分析模型,模拟真空玻璃在四点弯曲实验时的工况并以此确定真空玻璃在四点弯曲工况下的危险部位。根据数值模拟结果来确定实际加载时的载荷大小,以防实验对真空玻璃造成损害而影响后续实验。首先运用电测法和数字图像相关技术(DIC)方法来测量受压弯曲工况下的应变,通过对比实验测定结果与数值模拟结果,验证本文有限元分析模型的准确性与可靠性;接着以数值模拟的方式,通过改变玻璃夹层之间的支撑柱厚度与半径来获取四点弯曲时的危险部位应力值,并以此数据进行多元线性拟合,建立多目标规划数学模型来求得危险部位最小应力值所对应的支撑柱厚度与半径。
1 有限元静力学分析
1.1 真空玻璃物理模型的建立
1.1.1 平面几何模型与三维模型的建立
真空玻璃由2 片平板钢化玻璃构成,边缘用低熔点玻璃粉密封,玻璃基板厚度为6 mm、尺寸为1 100 mm×360 mm;中间用材料为低碳钢的支撑物隔开,其直径为0.5 mm,高为0.3 mm,间距为60 mm×50 mm。真空玻璃几何模型示意简图及支撑柱分布情况如图1 所示。
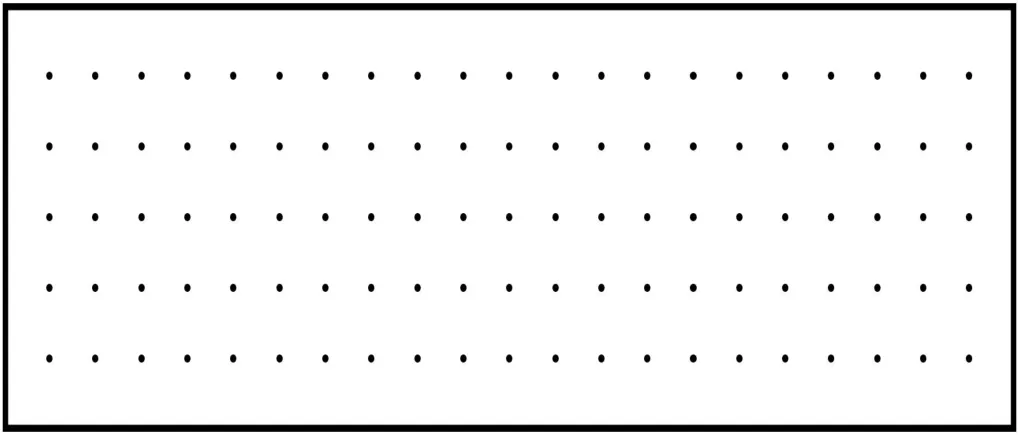
图1 真空玻璃几何模型示意简图及支撑柱分布情况
基于SolidWorks 建立四点弯曲实验所对应的三维几何模型,如图2 所示。其中2 根支撑辊被固定在拉伸试验机的底座;2 根压辊被固定在下夹头,用于四点弯曲实验时加载。支撑物为圆柱状,分布于2 层玻璃之间。

图2 四点弯曲工况下的实体模型
1.1.2 材料属性设置
材料属性参数的选取按照行业标准JGJ 102—2003《玻璃幕墙工程技术规范》,具体材料属性参数如表1所示。

表1 实验材料属性
在图2 的四点弯曲工况下的实体模型中,2 块玻璃板的材料为钢化玻璃,2 根压辊与2 根支撑辊的材料均为低碳钢,2 块玻璃之间的支撑柱材料同样为低碳钢。密封带由玻璃粉制成,其材料属性与钢化玻璃相同。
1.1.3 边界条件设定
通过对有限元分析模型设定合适的边界条件来模拟真空玻璃在受压弯曲时的实际加载工况,进而得出相应的数值仿真结果,其边界条件的设定如图3 所示。考虑到实际加载时2 根压辊与2 根支撑辊并未出现与基片玻璃表面滑移的现象,故将4 根辊的表面分别与基片玻璃的外表面设定为绑定。

图3 边界条件的设定
1.1.4 网格划分
作为有限元仿真的前处理技术,网格划分是一个极其重要的步骤。六面体网格在计算精度、变形特性及网格数量上比四面体网格具有明显的优势。因此,在网格划分时对所有模型均进行六面体网格划分,并在主要关注部位降低网格尺寸来提高计算的精确性。对研究对象进行网格划分的结果如图4 所示。
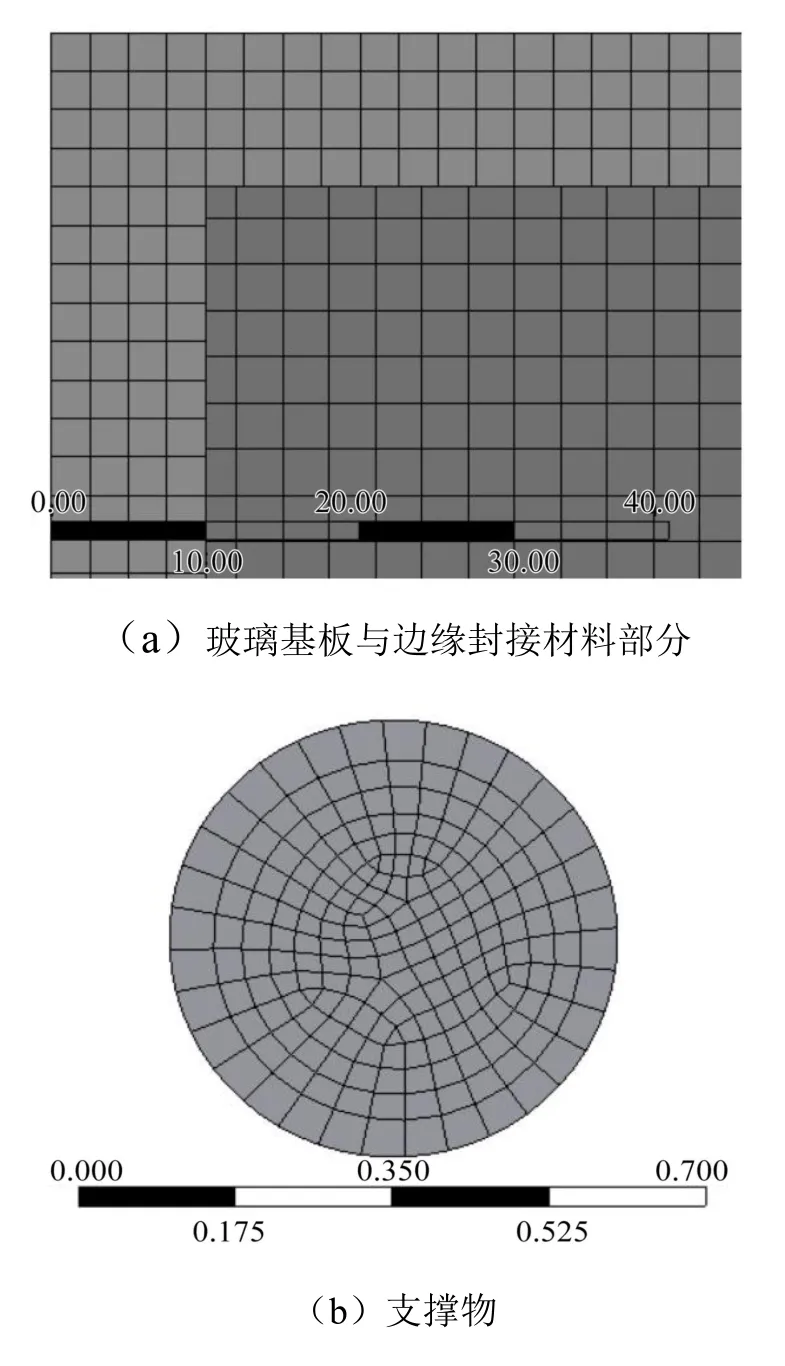
图4 网格划分结果(单位:mm)
1.2 四点弯曲工况下的数值模拟
在进行真空玻璃四点弯曲工况下的数值模拟时,结合1.1.3 中的边界条件设定情况,对上部2 个压辊设定向下300 N 的压力约束,以模拟真空玻璃所受的四点弯曲工况。
四点弯曲工况下的数值模拟等效应力结果如图5所示,并已标记上下玻璃基板外表面的危险部位处的等效应力值。由于真空玻璃结构具有很强的对称性,因此图5 仅展示玻璃基板50%的等效应力云图。基于ANSYS Workbench 的数值模拟,确定了真空玻璃在四点弯曲加载工况下的支撑物所对应的外表面危险部位,并已标记出危险部位和该部位的等效应力值。
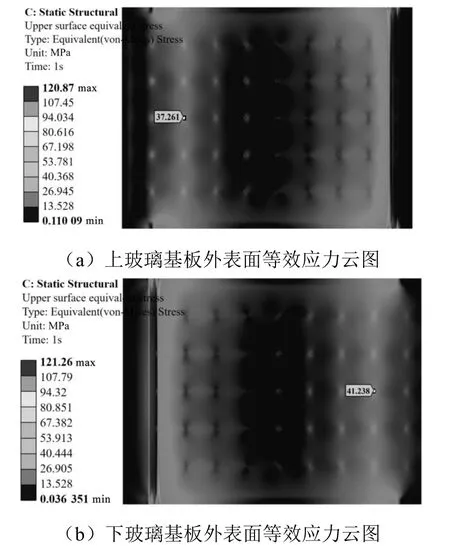
图5 玻璃基板等效应力云图
在图5(a)中可以看出,中部压辊与上部玻璃基板接触的地方存在较大的应力,这是2 个刚性体在相互挤压时所产生的正常现象,下玻璃基板(如图5(b)所示)亦如此。除去接触部位的接触应力以外,上玻璃基板在四点弯曲工况下的危险部位在第二列第三行的支撑物位置处,下玻璃基板的危险部位在第八列第三行的支撑物位置处。
2 实验结果与分析
2.1 电测与数值模拟结果对照
在对带支撑真空玻璃成品的受力情况进行了有限元静力学计算后,得到了有关应变、应力及位移的云图。继而在实验室进行实际操作分析,将数值模拟结果与实际实验结果进行比较并相互验证,检验数值模拟的准确性。对带支撑真空玻璃成品整体结构进行基于电测法和DIC 方法的受压弯曲实验,确定真空玻璃在受到特定载荷下的应变、应力及位移的分布情况。
电测法是利用电阻应变片测定被测物表面的应变,在实验中所使用的应变片由敏感栅、基底和覆盖层及引线这些部件组合而成,其中敏感栅是其结构的主要部分,在本质上相当于一个电阻,当实验构件在载荷下发生变形时,敏感栅的电阻值也会发生变化,进而将应变信号,转变为可以输出的电信号并通过设备输出应变数值。由于应变片对实验环境的温度变化十分敏感,并且电流的热效应会影响应变片的测量值,所以为了更加准确地测量实验构件的应变,排除热误差对电阻值的影响,所以在实验中采用1/4 桥路分析,添加温度补偿片。
在真空玻璃受压的过程中,玻璃基板会发生弯曲变形并产生应变。由于加载设备会影响光测对真空玻璃正中央部位视线的采集,所以贴片位置选择真空玻璃正中央部位,在上下玻璃基板正中央部位各贴1 片应变片。对数值模拟结果与电测数据进行对比,相互验证。
在电测法试验过程中,每加载30 N 记录一次应变仪所显示的数据,最终加载至300 N,共计录10 次实验数据。为减小误差,进行3 次实验,并取3 次实验结果的算术平均值作为最终实验数据,如图6 所示。
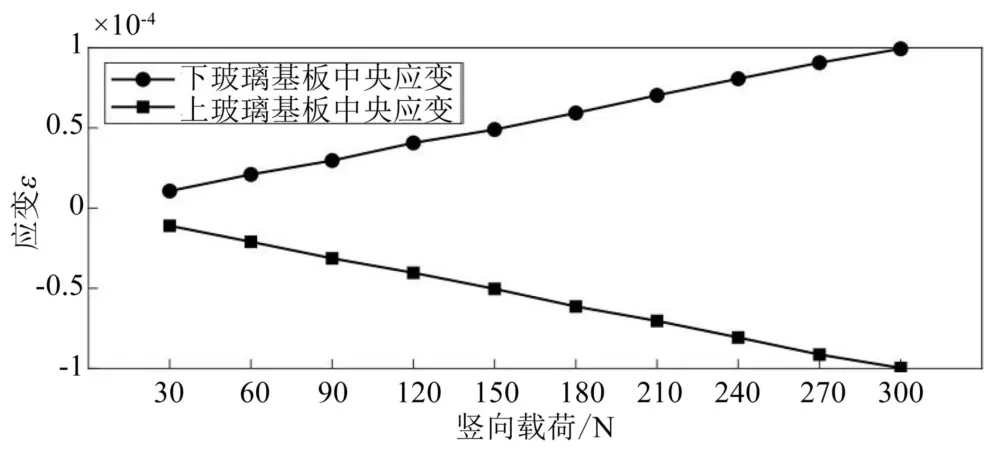
图6 基于电测法真空玻璃中央应变数据
基于3 次实验数据分析其误差范围,选取出同一载荷下的最大应变量与该载荷下的算术平均值进行比对,作为上极限偏差ξmax,其计算公式为:
将式(1)中的最大应变值转换为最小应变值即得下极限偏差,分别对上下玻璃基板中央应变求上极限偏差与下极限偏差,其偏差范围如图7 所示。从图7(a)可以看出,在刚开始加载时,有2 处的实验数据极限偏差大于5%,但随着载荷增大,数据的偏差变小并逐渐趋于0;在图7(b)中,所有数据点的极限偏差均小于5%。

图7 电测实验数据偏差
在数值模拟中提取上下玻璃基板的中央应变,由于应变片的长度为6 mm,故提取以正中央为中心左右各3 mm 的3 处应变,用其算术平均值代替该应变片所测位置的平均应变,其数值模拟结果如图8 所示。

图8 玻璃基板中央部位应变数值模拟
综上可知,电测法测得上玻璃基板中央在压辊下压300 N 时的应变为-99.7×10-6,数值模拟出的上玻璃基板中央平均应变为-101.96×10-6;下玻璃基板中央在压辊下压300 N 时的应变为99.3×10-6;数值模拟出的下玻璃基板中央平均应变为98.78×10-6,理论计算与实验结果基本一致,误差分别为2.27%和0.52%。
2.2 光测与数值模拟结果对照
该测量系统主要由CCD 摄像机、高速图像采集卡、光源和计算机组成。利用数学相关方法分析受荷载作用下试样表面数字图像,将表面随机分布的散斑点数据记录在数字图像中,利用数字图像的灰度值模式来精确测定变形与位移。该方法具有与被测物体不接触的优点。利用电测法测量实验对象的应变时,需要在被测物体表面粘贴应变片,如果被测物体的刚度较小容易发生变形,粘贴应变片可能会对局部的刚度造成影响。而利用DIC 方法不直接与被测试件接触,可以更准确地测量物体的应变情况。该方法测量范围较广,可以测试较大被测物体、较大测量范围内的全场应变与变形情况。
散斑制作是DIC 方法测试的关键步骤,散斑质量较好可以提高物体表面特征点的识别度,影响实验测试的结果。由于玻璃板表面较为平整,根据所测量范围的尺寸,利用散斑工具印制散斑,以提高散斑质量。在预分析建立标定模板时,通过降低标定误差并提高干扰因素水平进一步地提高实验测量精度。标定误差得分为0.038,该数值小于0.1,接受该标定模板。以图1 左下角为原点(0,0),选取以点(250,160)和点(290,200)为顶点的正方形区域为数值模拟与光测实验所测试部位。DIC 光测法所测出的形变云图如图9 所示,数值模拟结果如图10 所示。

图9 DIC 测试该区域的形变

图10 数值模拟测试该区域的形变
由图9 与图10 可以得出,由实验得出该区域的最小竖向位移为1.632 mm,数值模拟结果为1.614 7 mm;最大竖向位移为1.9 7 6 m m,数值模拟结果为1.971 mm,理论计算与实验结果基本一致,误差分别为1.06%和0.25%。
通过电测与光测实验对真空玻璃有限元分析模型的验证,得出了数值模拟结果与实验结果吻合较好,从而验证了有限元分析模型具有一定的可靠性,为后续的结构优化设计奠定基础。
3 应力多元关系可视化
通过静载与四点弯曲加载工况的实验验证,运用本文所建立的有限元分析模型对真空玻璃的结构设计进行优化。以真空玻璃基板之间的间隙与支撑柱直径为优化对象,探索真空玻璃在不同结构设计下的力学性能。
通过不同的支撑柱厚度与支撑柱半径的组合,探究上下玻璃基板内外表面的等效应力变化情况。将支撑柱的厚度设定为以0.05 mm 为步长,0.20~0.40 mm 这5种类型;将支撑柱的半径设定为以0.05 mm 为步长,0.15~0.50 mm 这8 种类型。通过这40 种配合,探究了上下玻璃基板内外表面等效应力的变化情况。在1.2.2 中的有限元模拟结果中,将已确定的危险部位作为本章节主要探究的2 个部位,并通过加厚此部位的网格厚度来获取更精确的结果。提取了40 种配合下的危险部位处最大等效应力值,并将此展示在可视化热图中,如图11 和图12 所示。
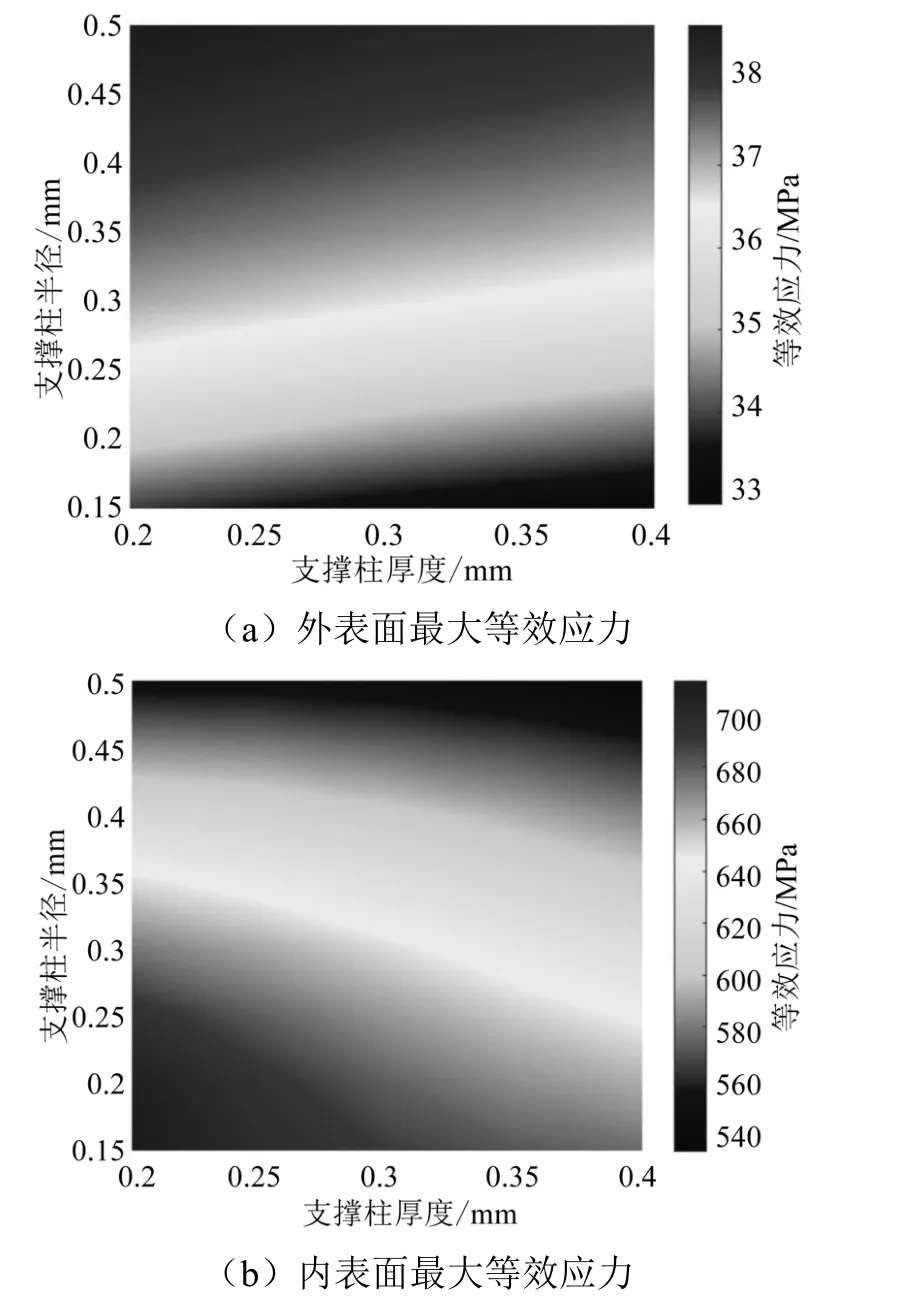
图11 上玻璃基板危险部位等效应力变化趋势
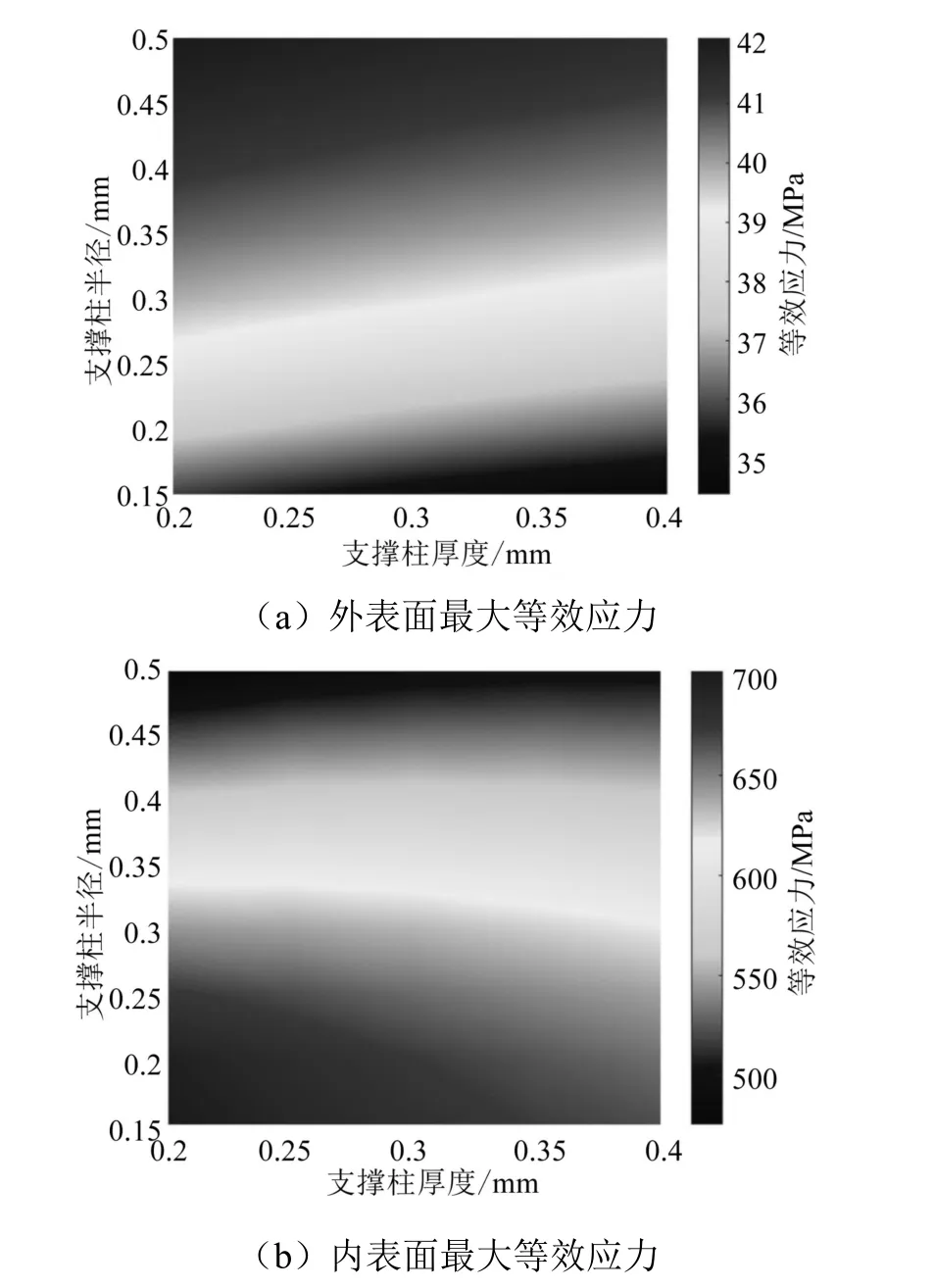
图12 下玻璃基板危险部位等效应力变化趋势
从图11(a)与图12(a)中可以看出,当支撑柱半径固定时,上玻璃基板外表面危险部位等效应力值随着支撑柱厚度略有减小;从热图条纹上来看,该减小趋势基本不随支撑柱半径的变化而变化。从图11(b)中可以看出,当支撑柱半径固定时,上玻璃基板内表面危险部位等效应力值依然随着支撑柱厚度而减小,但该减小程度随着支撑柱半径的减小而增大。而在图12(b)中可以看出,当支撑柱半径较大时,下玻璃基板内表面最大等效应力基本不随支撑柱厚度的变化而变化;但在支撑柱半径较小时,该等效应力值随着支撑柱厚度的增大而减小。
4 结论
基于本文所研究的真空玻璃模型,探究了真空玻璃结构在静载与风载工况下的变形云图及等效应变云图。支撑柱连线交点位置的变形最大,而支撑柱位置处的等效应变较大。
基于本文所建立的有限元分析模型,改变支撑柱的厚度及半径来探究最佳的力学性能表现。通过分析热图及其条纹分布方式,在四点弯曲工况下,玻璃基板外表面危险部位等效应力值随着支撑柱厚度略有减小,且该减小趋势基本不随支撑柱半径的变化而变化。
