一种无人机载监视雷达模拟数据生成方法
2023-03-20王丽赵浩然蔡甫李武旭
王丽 赵浩然 蔡甫 李武旭


关键词:无人机;监视雷达;航迹处理;模拟数据生成
0引言
无人机是一种有动力、可控制、可执行多种任务并能重复使用的无人驾驶航空器,具有技术集成度高、灵活性强、成本低等特点。近年来,无人机在人工影响天气、应急产业、气象监测、巡检、安防监控、农林植保、测绘与地理信息等领域得以快速发展。无人机具备的全时全域监视能力、探测与避让能力至关重要,使其在军事和民用领域发挥重要作用,成为空域中的重要成员。
无人机载监视雷达作为无人机探测与避让系统的非合作目标探测传感器,通过空对空目标监视为无人机探测与避让系统提供邻近空域的监视信息,是大型、中型无人机的主要感知设备。无人机载监视雷达系统如图1所示,它能够连续工作,并且能在水平、俯仰两个方向对入侵飞行目标进行探测,实现对非合作目标的距离、角度、速度等信息的提取并形成入侵目标航迹信息。
在无人机载监视雷达系统的研究过程中,需要有合适的探测数据源来检验该雷达系统的效能,然而外场调试成本太高,而且很容易受到其他因素影响,很难顺利开展调试工作,此时,数据模拟器则起到了重要的作用。然而,目前针对数据模拟器的研究主要集中在采样信号的数字模拟方面,直接检测整个处理过程(信号处理和航迹处理)的效果,而针对航迹处理单元的原始目标数据模拟方法研究较少。为了单独检测航迹处理单元的处理效果,本文针对航迹处理单元需要的数据源提出一种模拟数据生成方法,用以加速航迹处理单元的调试进度,完善航迹处理单元的功能。
1模拟数据生成
1.1航迹处理单元作用
無人机载监视雷达航迹处理单元接收信号处理后的数据,包括触发数据、原始目标数据,对数据进行处理,并将处理后的航迹信息上报。航迹处理的主要作用是对包含虚假目标的原始目标数据进行预处理、点航关联、航迹更新等操作,得到准确的目标航迹,并进行航迹初始化、航迹外推,定期对航迹进行维护处理。
1.2数据生成方法
本文提到的模拟数据为无人机载监视雷达航迹处理单元提供合适的数据源,包括触发数据、原始目标数据等。其数据生成过程如图2所示,包括目标建模、模拟数据产生、模拟数据整合、模拟数据发送等部分。目标建模是根据无人机飞行环境建立雷达监视的目标运动状态模型,目标运动状态涉及的参数包括目标距离、角度、径向速度、信号幅度等;模拟数据产生是按时间产生触发数据、虚假目标数据、原始目标数据,并将数据按行存储到文件中;模拟数据整合则是从数据文件中读取数据,将触发数据整合成触发数据包格式,将虚假目标和真实目标整合成原始目标数据格式;模拟数据发送则是将整合好的数据发送至航迹处理单元需要的地址。
2模拟数据产生
2.1目标参数分析
根据无人机分类、无人机飞行管理要求,以及无人机载监视雷达运行要求,无人机载监视雷达模拟原始目标的参数包括模拟目标的距离、角度、分辨力、速度等。
2.1.1模拟目标的距离
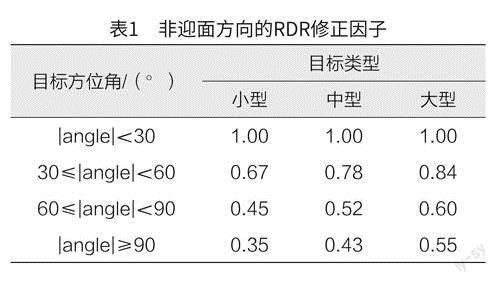
模拟目标的最远距离为雷达探测目标需要满足跟踪精度要求的最大距离的最小值(RDR),其大小取决于目标类别、速度、目标方位角(angle)等因素。模拟目标的最近距离为雷达探测目标满足跟踪精度要求的最小距离的最大值(RCPR)。参考RTCA/D0-366标准,应按以下情况设置模拟目标距离参数值。
(1)RDR设置如下:①晴空情况下,小型目标在迎面方向RDR应不小于10.1 km;②晴空情况下,中型目标在迎面方向RDR应不小于11.12km;③晴空情况下,大型目标在迎面方向RDR应不小于12.41km;④从其他方位角接近的目标,由RDR修正因子进行缩放,其修正因子如表1所示。(2)RCPR不应大于1219.2m。
2.1.2模拟目标的角度
模拟目标的角度分为水平方位和俯仰方位,其参数设置如下:①无人机载监视雷达探测俯仰角(垂直参考无人机飞行轨迹)范围为-15°~+15°,仅限于304.8m地面高度以上的目标;②无人机载监视雷达探测水平角(相对于无人机纵轴)范围为-110°~+110°。
2.1.3模拟目标的分辨力
分辨力应在RDR的范围内,以至少90%的概率分辨垂直或水平至少相隔609.6m的两架目标飞机。
2.1.4模拟目标的速度
无人机类型及速度典型值如表2所示,因此模拟目标的速度应参照表2设定。
2.2模拟数据产生过程
航迹处理单元需要的模拟数据包括触发数据、运动目标数据、虚假目标数据。本文采用MATLAB软件对运动目标进行建模,产生目标数据,同时产生触发数据等,将这些数据存储到数据文件进行保存。
模拟数据产生过程如下:①设置扫描周期总数;②随机生成虚假目标数据,并放入虚假目标数据数组;③将触发数据、运动目标数据、虚假目标数据几个数组的数值依据相干处理间隔(coherentprocessing interval,CPI)计数按顺序依次写入数据文件。
触发数据产生过程如下:①设置扫描周期总数、每个周期扫描波束个数;②初始化触发数据数组;③每个波束中CPI值自动计数,时间标签按CPI值计数加1;④按扫描波束分配计算每个波束的水平方位角和俯仰方位角;⑤添加触发数据标识,生成触发数据,并存储到触发数据数组。
根据模拟目标参数,对运动目标进行建模,运动目标的相关参数均应满足上述参数值范围。运动目标的状态可分为匀速和匀加速等不同情况,其运动目标数据产生过程如下:①设置运动目标个数;②设置每个目标的起始、终止位置,包括径向距离、水平方位角、俯仰方位角;⑧设置每个目标的起始时间、目标检测点个数,以及雷达扫描周期时间等初始值;④初始化运动目标参数存储数组和扫描周期总数;⑤按运动目标模型计算当前扫描周期中运动目标的速度、距离、角度、距离分量、速度分量、时间等参数;⑥按目标所在波束计算生成当前扫描周期运动目标所在的波束CPI值;⑦随机生成当前扫描周期中运动目标的回波幅度值;⑧添加目标数据标识,将每个周期运动目标的参数值存储到目标数据数组。
3模拟数据整合
3.1整合过程
模拟数据整合的目的是将触发数据和目标数据按定义的接口数据结构分别进行组包,并发送至设置的网络地址,其实现方式为Qt Creator(一款轻量级集成开发环境)。其整合过程包括两个线程:一个为数据文件读取、数据组包线程;另一个为数据发送线程,线程间通过共享队列传递数据。
数据整合线程的过程如下:①选择数据读取的文件;②打开文件,按行读取数据并放入list(列表);⑧通过标识区分触发数据和目标数据,分别按相应数据进行数据帧组包;④将组包好的数据放入队列;⑤数据发送线程从队列中取出每条数据;⑥区分触发数据和目标数据,并将数据发送至相应的网络地址。
3.2接口数据结构
接口数据包括触发数据和目标数据两种,其数据结构均包括消息头、消息体、校验和3个部分,不同点在于消息体内容。触发数据的消息体中只包含了CPI计数、水平方位中心、俯仰方位中心3项扫描信息;目标数据的消息体则包含了更多的目标信息,如目标水平方位、俯仰方位、方位精度、距离、距离精度、径向速度、速度精度、幅度等。触发数据结构如表3所示。
4结语
目前针对无人机载监视雷达系统数据模拟器的研究主要集中在信号模拟方面,鲜有针对航迹处理单元的数据模拟方法研究。本文专门为无人机载监视雷达系统中的航迹处理单元提供一种模拟数据生成方法,通过分析无人机载监视雷达探测目标的参数,对运动目标进行建模,并说明了整个模拟数据生成过程。通过此方法生成的模拟数据,可作为检验航迹处理效果的数据源,以此作为测试手段,提高系统调试效率,降低调试成本。
