采煤机自动控制系统设计研究
2023-01-26王志敏
王志敏
(铁峰煤业有限公司,山西 朔州 037200)
引言
煤炭作为我国的支柱产业,安全高效生产对行业发展至关重要。近年来,将工作面人员从井下恶劣的生产环境中解放出来逐渐成为我国煤炭行业研究的热门话题,煤炭开采的自动化智能化发展逐渐成为研究的主要方向。现阶段,采煤机作为煤炭井下的重要生产工具,其自动化智能化水平还普遍偏低,大多数企业仍然以人工割煤为主[1-5]。针对这一现象,本文提出了采煤机自动截割控制的设计研究,通过基于定速控制的参数化自动截割技术,实现采煤机的自动化智能化截割,解放井下人工劳动力,保障企业的人身财产安全。
1 采煤机基本机构及工作方式
采煤机主要由摇臂、电控箱、牵引系统、机体、行走箱以及泵箱等组成。其中,截割系统主要是由滚筒与摇臂组成,主要作用是截割煤炭,同时将煤炭运输至输送机;牵引系统主要由牵引部与行走箱组成,主要作用是牵引采煤机行走,使采煤机可在工作面自由移动;中部框架是由支腿、平滑靴、拉缸以及各类连接部件等组成,中部框架是整个采煤机系统的主要承载部件;电气部分主要包括电源、电控箱、开关、变压器以及各类电缆等[6-8]。
采煤机通过两端进刀以及中部进刀两种方法工作,大多数企业以两端进刀方法为主,采用双向割煤技术。两端进刀割煤技术主要由三个基本动作组成,包括设备左右牵引移动、摇臂上下移动定位以及液压支架推溜。采煤机的工作步骤主要分为以下5 步:第一步,采煤机运行至工作位置,前后滚筒对顶煤以及底煤进行割煤操作;第二步,当煤壁割透后,将采煤机转向相反的方向,前滚筒上升,后滚筒下降,在大约为设备两个机身处位置开始液压支架推动运输机,使采煤机开始斜切煤壁;第三步,采煤机进入正常工作状态;第四步,升降前后滚筒,移动支架与运输机,设备至平巷行程;第五步,升降前后滚筒,进入快速采煤行程,直至该平巷采煤完成。
2 采煤机自动控制系统硬件设计
2.1 整体设计
采煤机自动控制系统主要可以分为主控系统、IO控制系统、监测系统、线路系统、变频器系统、远程系统以及人机界面系统。其中,PLC 可编程控制器选取欧姆龙40 点PLC 为系统主控制器,线路选取为CAN总线结构。采煤机自动控制系统结构示意图如下页图1 所示。主控系统主要由可编程控制器、动力源以及继电器等组成,主要作用是控制摇臂上下动作、设备左右移动、系统保护、过电流保护、高温保护、瓦斯泄露保护、线路保护、传感器保护以及数据收集;IO 控制系统的主要作用是控制设备部件的断电与送电,控制部件包括截割电动机、变压器以及变频器等,同时,IO 控制系统还包括遥控、按钮以及开关等信号控制器;监测系统主要由各类传感器组成,是系统信号采集的主要来源,包括温度传感器、电流传感器、油温传感器、压力传感器以及位置传感器等,可通过各类传感器对采煤机信息进行采集与计算分析,从而得出采煤机当前的运行状态,监测设备是否运行正常;线路系统使用的是CAN 总线结构,CAN 线路为多主模式,可在任意一节点对其他节点在任何时刻发送信息,节点之间不存在主节点与从节点之分,在报文标识符方面,CAN 节点具有优先级区别,在不同情况可进行不同的操作,级别较高的节点传输可在134 μs 范围内,CAN 运用的是总线仲裁方式,当总线接收到许多节点的信息时,总线会对级别较高的节点信号数据进行传输,级别较低的节点信号会暂时忽略;远程系统的主要作用是将采煤机井下运行的实时情况传输至监控中心或者地面系统,以使调度人员可对采煤机实时信息进行掌控,该系统是采煤机自动化智能化技术的关键系统;变频器系统主要包括主变频器以及从变频器两部分,其中主变频器设置在设备左边,从变频器设置在设备右方。变频器的控制方法采用的是直接转矩控制法,主、从变频器转矩控制一致,系统设有故障报警功能,且当系统提供扭矩有差别后,系统会迅速调节一致,保证采煤机的科学合理运行。
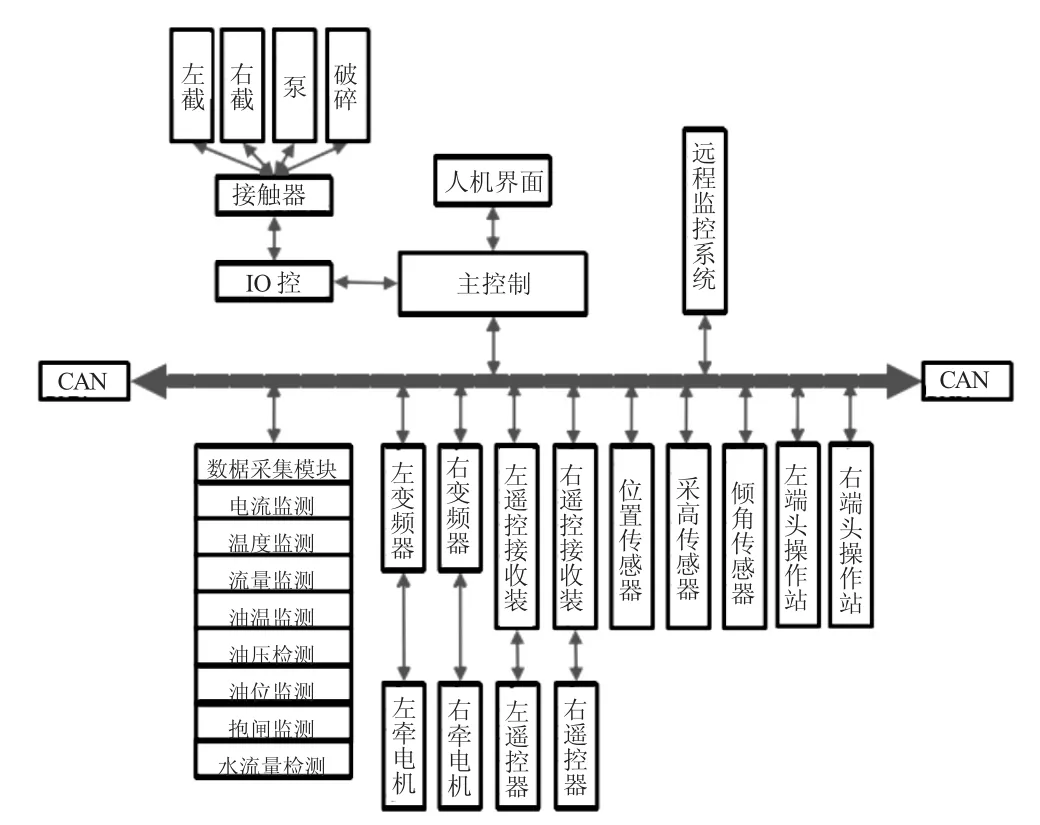
图1 采煤机自动控制系统结构示意图
2.2 基于定速控制的参数化自动截割技术
采煤机自动化智能化控制采用的是基于定速控制的参数化自动截割技术,其本质是对采煤机的割煤采高进行人工学习,通过对正常的割煤过程进行学习记录,完成设备的智能控制。基于定速控制的参数化自动截割技术主要包括数据采样、数据处理、路径参数化以及定速自动截割四个步骤。其中,数据采样是对人工割煤过程进行相关数据记录;数据处理主要是通过PLC 可编程控制器进行空间以及地址映射;路径参数化主要是将处理后的数据进行模型建立,利用模型以及相关数据形成模式化的路径,实现智能化的控制;定速自动截割主要是对摇臂上升下降以及设备行走速度与方向进行相关设置。相关设置需通过人工示教的方法进行,使操作人员正常割煤,控制系统对割煤过程进行学习记录。在实际截割过程中若发生特殊情况,系统还设计了人工干预功能,人工干预的具体流程如图2 所示。
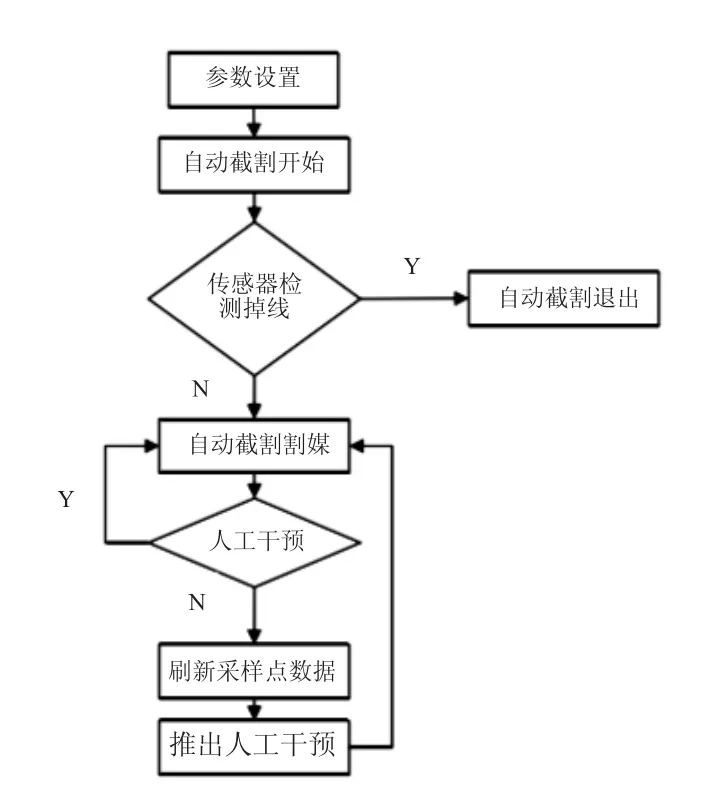
图2 自动截割下人工干预流程图
3 采煤机自动控制系统软件设计
采煤机自动控制系统软件,本文选用CX-Programmer 软件进行设计。CX-Programmer 软件是欧姆龙PLC 的配套编程软件,具有三种编程语言模式,同时具备程序模拟功能,可对错误程序进行及时纠正,本文采用的编程语言为梯形图语言。首先,应依据采煤工艺进行参数设置,依据现场实际生产状况和工艺进行对应核对,随后即可进行人工示教以及自动记忆截割,同时将人工干预流程编入系统内,完成后即可得到采煤机自动控制系统软件。
4 系统测试
将上述设计应用于某煤矿进行硬件、软件调试并进行整机智能化运行测试,系统运行平稳可靠,自动截割系统各部件运行正常、方便灵活、无错误动作发生,符合自动控制系统的设计要求。
5 结论
随着自动化智能化技术的不断发展,煤矿井下开采智能化逐渐成为煤炭企业发展的主要方向。采煤机作为井下开采的关键设备,其自动化智能化发展至关重要。针对现阶段采煤机智能化水平较低的现象,本文提出了采煤机自动截割控制的设计研究。通过分析研究,本文主要得出了以下结论:
1)采用基于定速控制的参数化自动截割技术可实现采煤机自动控制系统设计研究,通过对采煤机数据采样、数据处理、路径参数化以及定速自动截割可完成采煤机自动控制系统设计。
2)对设计系统进行测试后发现,采煤机自动控制系统运行平稳可靠,部件运行灵活,符合相关设计要求。
