基于CAN 及TCP/IP 通信的电梯远程监控方案设计与测试
2023-01-26史瑞鹏
史瑞鹏
(西山煤电(集团)有限责任公司机电部,山西 太原 030002)
引言
为满足人们对电梯运行安全性、可靠性的迫切需求,电梯远程监控系统应运而生,其能够做到电梯运行状态实时显示、故障及时报警、故障点及时定位。电梯远程监控系统利用专用传输线路、专用传输网络实现电梯实时运行数据、故障信息的远程传输,通过交互式人机界面将电梯运行状态展现于监控界面,实现实时监控和故障提示。电梯远程监控系统集运行状态监视、电梯动作控制、电梯故障诊断、电梯运行管理类、电梯历史数据存储/查询/分析等功能于一体,是一个较为复杂的综合系统[1-2]。电梯远程监控系统的典型代表有美国奥蒂斯电梯的REM系统、日本三菱电梯的MelEye 系统,能够完成电梯远程操作、远程监视以及故障诊断功能,但是图像显示功能薄弱。国内电梯远程监控系统独立于电梯系统之外,典型代表有凯博公司研制的“调制解调器-前端机-PLC 控制器”系统结构,可监视任何一个与前端机相连的电梯,通用性强,但是故障诊断能力稍差[3-4]。本文为解决现代电梯监控系统存在的节点多、距离长、干扰源多的问题,设计基于CAN、TCP/IP 通信技术,在ARM9 开发平台实现电梯远程监控系统,达到电梯实时故障诊断、智能化管理、透明化运行的目的。
1 系统设计
电梯远程监控系统设计以保证电梯状态数据的实时性、准确性为目标,以电梯运行状态数据的远程可靠传输和再处理为手段,实现电梯监控工作人员对电梯的“零距离”监控。电梯远程监控系统设计框图如图1 所示,由监控电梯本体、CAN 总线通信网络、前端采集模块、TCP/IP 通信网络以及电梯远程监控中心五部分组成。1~N 号电机的运行状态、故障信息通过CAN 总线通信传输至前端采集模块。前端采集模块周期性地接收电梯运行状态信息和故障信息并对上述信息进行正确性判断、逻辑处理;其中状态信息主要有运行方向、梯门状态、楼层状态信息等;故障信息主要有平层故障、梯门故障、变频器故障、传感器故障等。前端采集模块将接收并处理后的电梯运行所有数据以TCP/IP 通信模式传送给电梯远程监控中心进行集中显示,便于电梯监控工作人员及时查看、统计并处理故障。选用CAN 总线通信、TCP/IP 通信能够在降低电梯运行数据传输成本的同时提升数据传输的可靠性和实时性,保证电梯远程监控系统安全、可靠、高效运行。
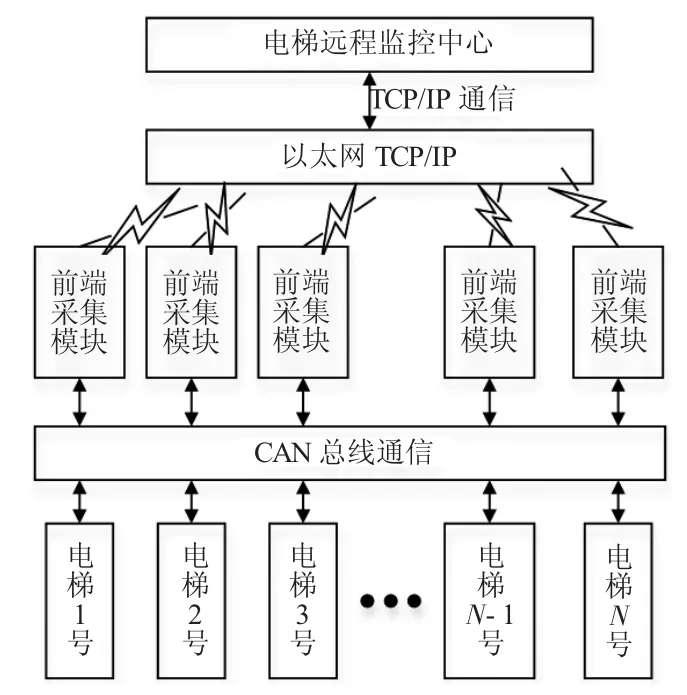
图1 电梯远程监控系统设计框图
2 硬件设计
电梯远程监控系统硬件设计框图如下页图2 所示,其核心处理器为ARM Cotex-A9 四核CPU,型号为Exynos4421。该微处理器采用Thumb-2 技术,支持单精度、双精度浮点运算;支持WIFI/CAN/RS485 通信;支持100 Mbit/s 高速TCP/IP 通信;支持Linux 内核移植,满足电梯远程监控系统设计要求[5]。核心处理器内的CAN 主控制器通过高速CAN 收发器接收来自电梯的运行数据;TCP/IP 控制器可将处理后的电梯运行数据通过网络插座变换器发送至电梯远程监控中心。核心处理器的供电电压等级为DC3.3 V,需将外部DC5 V 供电电源通过电源转换模块传送至电源管理模块,通过电源管理模块为CAN 控制器、TCPIP 控制器以及网络插座变换器供电。
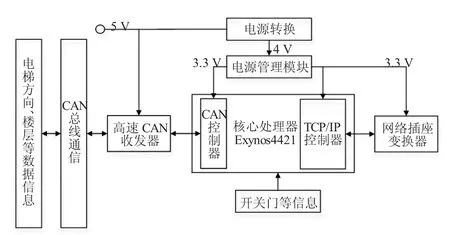
图2 电梯远程监控系统硬件设计框图
高速CAN 收发器选用Microchip 公司研发的MCP2515,该控制器为串行数据传输方式,接线简单,占用芯片资源较少,且支持SPI 接口。在设计CAN 总线模块硬件电路时,在MCP2515 控制器后增加MCP2551 模块,为接收电梯数据、信号提供差分收发能力,提高收发CAN 总线数据的抗电磁干扰能力。网络插座变换器选用联华电子公司研发的DM9621,该控制器可提供高速USB 转10/100 Mbit/s 数据传输,符合并支持USBV1.0-1.2 规范。同时DM9621 芯片集成了片上10/100 Mbit/s TCP/IP 转PHY 独立接口,可将TCP/IP 信号转换为平衡信号进行传输,在提高传输效率的同时减少了共模干扰。
3 软件设计
电梯远程监控系统软件设计基于Linux Ubuntu12.04.2 平台实现。该平台支持CAN socket 编程,可建立电梯运行数据CAN 连接和数据收发功能。该平台同时支持基于TCP/IP Socket 编程,可建立电梯运行数据TCP/IP 连接、数据请求以及数据应答,完成TCP/IP 通信。
电梯远程监控系统软件系统上电并完成设备初始化过程后,建立电梯本体与前端采集模块的CAN总线通信连接,建立前端采集模块与电梯远程监控中心的TCP/IP 通信连接。电梯运行所有数据经CAN、TCP/IP 通信传送至电梯远程监控中心。电梯远程监控中心对数据进行接卸、分类、存储、显示,有故障且有手动报警信号时触发自动拨号并联系维保人员紧急救援;有故障无手动报警信号时联系维保人员进行电梯维护保养并将故障信息上传至移动端;当没有故障代码时,在Web 端为用户提供查看数据信息。
4 系统测试
4.1 系统硬件测试
在确保电梯远程监控系统硬件电路正确且测试电路没有接错线、短路、短路故障的基础上完成上电过程,并对硬件各模块进行输入、输出电压测试。测试结果为:
1)电源管理模块输入电压标准值为4 V,实测输入电压值为4.7 V;输出电压标准值为1.8 V、3.3 V,实测输入电压值为1.78 V、3.15 V;
2)CAN 总线模块输入电压标准值为3.3 V,实际输入电压值为3.15 V;
3)网络插座变换器输入电压标准值为1.8 V、3.3 V,实测输入电压值为1.78 V、3.15 V。
上述电源系统测试效果较好,满足供电需求。
4.2 CAN 总线通信测试
电梯远程监控系统CAN 总线通信测试通过USB_CAN tool 工具完成,将CANH、CANL 信号线与硬件正确接线后,在USB_CAN tool 软件系统中设置波特率、CANID 并建立Socket CAN 通信连接。CAN总线通信测试系统连接好后通过接收、发送的CAN总线数据验证通信链路是否正常,数据传输是否正确并满足实时性要求。
4.3 TCP/IP 通信测试
电梯远程监控系统TCP/IP 通信测试通过PC 机、数据采集器以及下位机测试终端完成,利用网线将各设备连接并保证在同一个局域网内。以PC 机位服务器端、下位机测试终端为客户端,建立Socket TCP/IP通信连接,依次完成三次握手流程。同时在服务器端发送模拟数据,在客户端查看收到的数据是否与发送的数据一致并满足实时性要求。
4.4 上位机测试
电梯远程监控系统上位机测试基于远程监控平台,模拟电梯运行状态,在监控平台查看是否可以正确展示电梯运行状态。设计并实现的电梯远程监控平台人机界面如图3 所示,模拟“C1 号电梯轿厢开门超时”故障。
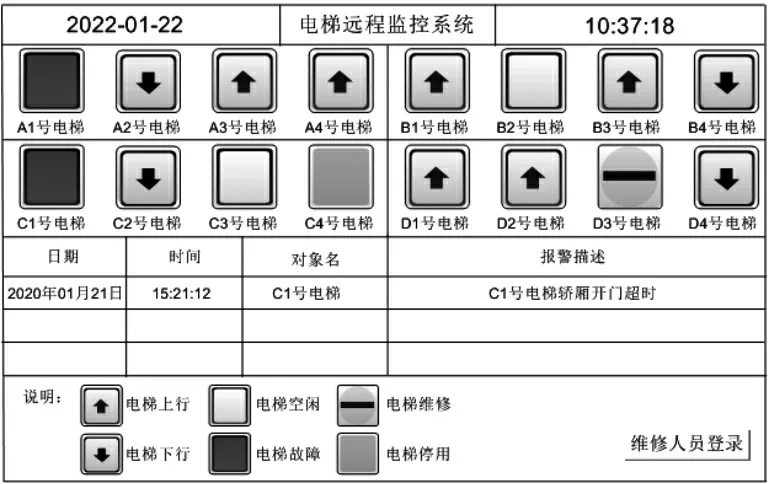
图3 电梯远程监控平台人机界面
5 结论
1)基于ARM9 Exynos4421 芯片为核心,利用CAN总线通信技术、TCP/IP 通信技术实现电梯运行状态、故障信息的远程实时、智能监控,并达到透明化运行的目的。
2)搭建电梯远程监控系统硬件、CAN 总线通信、TCP/IP 通信以及上位测试场景,测试结果表明:硬件设计方案电源供电系统稳定;CAN 总线通信链路、TCP/IP 通信链路稳定,实时性好,数据传输正确。
3)该方案实现了电梯远程智能监控,对提升电梯管理水平,保障电梯安全、高效运行具有非常重要的意义。
