磁致伸缩触觉传感器研究进展
2023-01-07刘锦锋卢全国王红州黄永东李志豪邹晓辉占晓煌
刘锦锋,卢全国,王红州,黄永东,李志豪,邹晓辉,占晓煌
(1 江西省精密驱动与控制重点实验室 江西 南昌 330099)
(2 江西省机械科学研究所 江西 南昌 330095)
0 引言
触觉感知作为人与外界信息交互的最基本功能之一,同样也是机器人实现与外部环境感知的重要功能之一[1]。为了机器能够实现更加精细和复杂的操作,触觉传感器广泛应用于服务机器人、远程医疗器械、精密机械、空间遥控机械臂等,通过更全面的环境因素识别和力反馈来完成智能识别、灵巧操作、精确定位、稳定抓取等[2]。
传感器通常由敏感元件和转换元件组成。磁致伸缩材料是一种在磁场作用下发生形变、在应力作用下磁感应强度发生变化的智能材料,被列为美国磁学与磁性材料会议(MMM)和IEEE 国际磁学会议(Intermag)等国际大型会议的专题之一[3]。磁致伸缩触觉传感器原理是当外界条件引起磁致伸缩敏感元件发生形变时,根据磁致伸缩逆效应,其周围磁场会发生相应的变化,此时转换元件能将这一变化转换成对应电信号输出;能用于触觉力、力矩的识别、物体形状识别、表面粗糙度识别等。近年来,因其高效的磁机转换效率和快速响应能力,而受到广泛国内外研究人员的关注,在磁致伸缩材料和传感器的优化上不断取得新的成果[4-6]。
1 基于Galfenol的触觉传感器
自从Galfenol 问世,因其具有良好的机械性能又有较大的磁致伸缩率,相比于传统的稀土材料Terfenol-D,Galfenol 便于加工,有更高的抗拉强度,并具有环境适应性强、经济实用等特点,使得其在智能器件上得到非常广泛的应用[7]。
1.1 晶须类触觉传感器
2012年,马里兰大学的Michael[8]受动物触须启发,提出了一种基于Galfenol 的晶须触觉传感器,将Galfenol“晶须”悬臂在铝基中,永磁铁提供偏置磁场,巨磁阻(GMR)传感器作为转换元件同样也固定在铝基上,用以检测晶须可能被各种外部刺激弯曲引起的磁场变化,如图1所示。
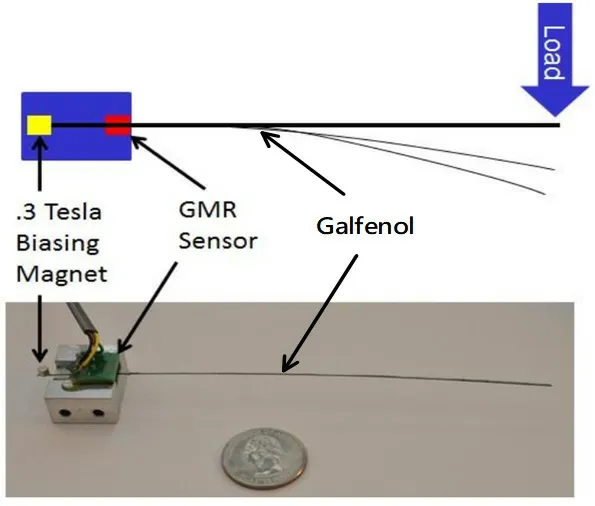
图1 Galfenol 晶须触觉传感器
2018年,赵冉等[9-10]采用霍尔元件作为转换元件,使用Galfenol 薄片悬臂梁和Galfenol 薄片加铍青铜复合悬臂梁的两种方式,实现了传感器的双向触觉感知,并测试了基于悬臂梁的磁致伸缩仿生晶须传感器的静态和动态灵敏度,静态下达到了2.20 mV/mN,动态时,在(0.5~60)Hz不同频率下,灵敏度峰值在40 Hz 时达到了4.5 mV/mN。
1.2 手指类触觉传感器
2017年,河北工业大学王博文团队[11]应用Galfenol材料设计、制作了一种可用于机器人指尖对触觉力测量的新型压力传感器,该传感器接触压力与电压信号、电压峰值呈线性关系,且测量电路简单、精度高。
结合仿生学原理,当手指与物体接触时,皮下感受器将产生动作电位。2018年,王博文等[12]成功制作了一种应用在机械手用于纹理探测的触觉传感器,如图2。选用牛仔布、尼龙丝带、薄纱、纱布和粗布作为测试对象,实验结果表明该传感器能分辨出主观感受:粗糙-光滑、稀疏-细密属性。
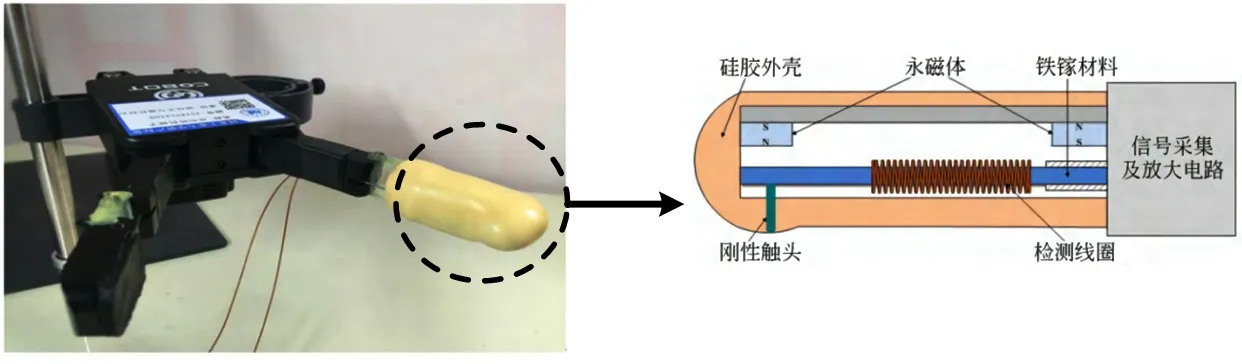
图2 用于机械手的纹理探测传感器
2019年,王丽丽等[13-14]在此基础上进行改进,将刚性触头改成探针触头,用采用霍尔传感器代替检测线圈作为转换元件,并建立了纹理触觉传感器输出模型;同样选取上述5 种材料利用直流电机和传送带实现往复运动进行测试,实验表明该传感器在上述基础上稳定性较好,灵敏度更高,达到了97.31 mV/mm。
1.3 阵列类触觉传感器
早在2006年,Hale,K.等[15]在探索Galfenol 作为磁致伸缩材料的用途时就提出,是否可以将Galfenol 用在二维的网格阵列的磁路中当作形成触觉传感器,通过实验发现虽然在3×3 网格阵列效果不是很有说服力,但在2×2 网格阵列正确识别了4 根杆中的3 根,证明这一想法的可行性。
随着对触觉传感器的不断探索,阵列式的磁致伸缩触觉传感器被提出[16],触觉传感单元的灵敏度能达到151 mV/N,能对物体刚度进行感知。通过建立理论的摩擦系数检测模型和实验分析,成功地检测出所抓取的物体的表面静摩擦系数[17];后续还对抓取的不同物品进行了识别,通过输出电压的差别,在特定条件下应用支持向量机算法对所抓取的物体进行识别,识别率达到了87.5%[18]。
受动物毛发启发,翁玲、刘莎莎等[19-21]将Galfenol细丝倾斜放置以模拟动物毛发形态,先后分别设计了2×3,3×3 的传感器阵列,仿照动物的皮肤,使用柔性印刷电路板,如图3所示,使得传感器不仅能更好地贴附在机械手上,在抓取物体时也能更灵活,可以有效采集应力信息。在2×3 的柔性磁致伸缩触觉传感器阵列的实验中对不同刚度的圆柱体和橡胶进行了识别与测试,与理论值最大误差为5.1%。在3×3 的柔性磁致伸缩触觉传感器阵列的实验中可以简单区分不同刚度和形状的样品。传感器输出稳定,标准差为1.64 mV。该传感器可应用于机械手上,实现对圆形类目标物触觉力的精确感知。
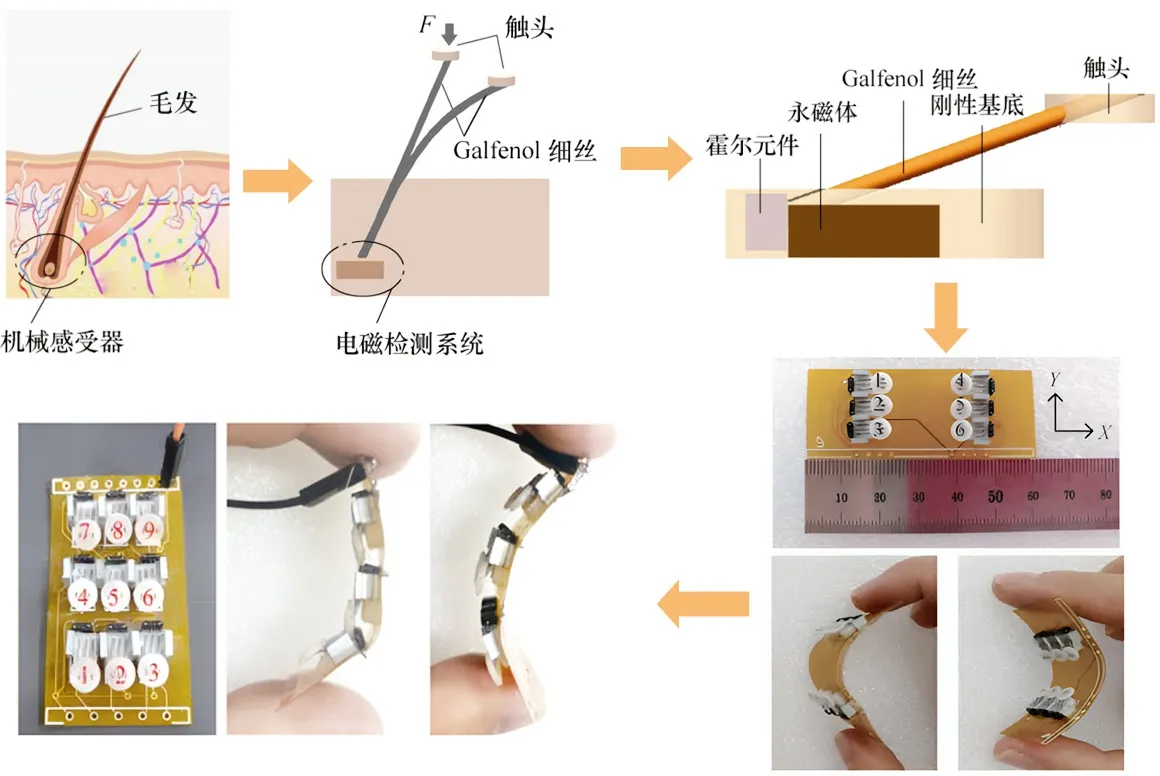
图3 柔性磁致伸缩触觉传感器阵列
2 其他类型磁致伸缩触觉传感器
2.1 复合新型材料触觉传感器
2014年,Chang[22]提出了在硅衬底上制造具有嵌入金属的聚合物结构的新工艺方案,实施了由聚合物结构和嵌入式3D Ni 线圈绕组组成的触觉传感器设计,如图4所示。由于聚合物振膜在触觉力的作用下发生变形,3D Ni 线圈电感器的磁致伸缩效应会引起磁导率的变化,通过电感变化检测磁导率变化以及触觉力。通过实验测量表明,在0~1 N 的感应范围内,灵敏度约为1.33%/N,最后作者还提出了可将该工艺进一步扩展为将不同3D 结构嵌入不同材料(如环氧树脂、玻璃),为后续研究提供了一个新的方向。
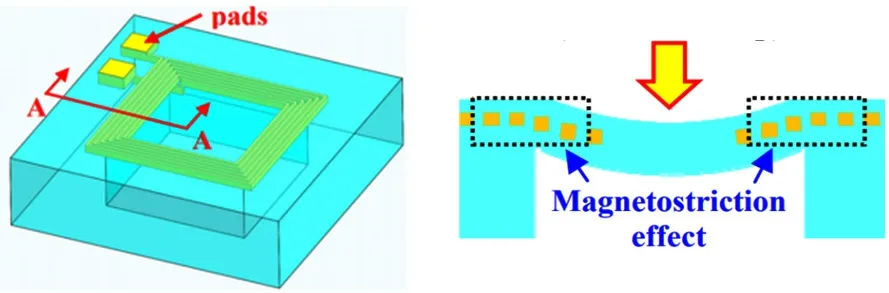
图4 嵌入式3D Ni 线圈触觉传感器
对于生物医学应用,用作传感器或执行器的智能材料必须符合一些标准,特别是生物相容性和柔软性[23]。Gildas Diguet[24]通过将磁性颗粒添加到可压缩泡沫聚合物中来产生对压缩的敏感性。泡沫基复合材料的制造具有小泊松比,可实现高达50%的压缩,这种压缩会引起其磁场的变化。这可以使用线圈进行检测,通过将传感线圈设置为3 个×3 的紧凑阵列,传感器成功地检测并定位了施加的变形。磁层的厚度为3 mm,线圈的高度为2 mm,直径为6 mm。传感器轻便,易于制造,可以方便地用于机器人科学中的触觉感应。
2.2 基于微米、纳米技术的触觉传感器
2016年,Chang 等[25]进一步研究,使用台积电0.18 μm IP6M 工艺制造了一种能用于触觉力感知的无线磁致伸缩型压力传感器,并通过实验展示了传感器的无线传感能力。其基本结构采用CMOS 工艺的金属层和介电层分别形成磁线圈和传感膜片,附加的磁致伸缩CoFeB 薄膜通过特殊的溅射方法沉积和图案化,无线感应可通过外部读取线圈获得,基本原理如图5所示。
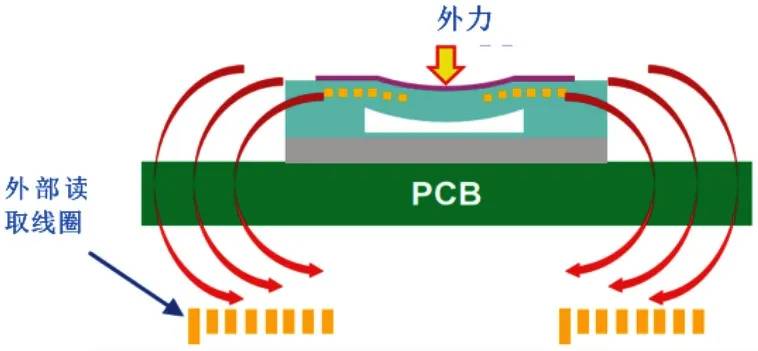
图5 无线磁致伸缩触觉传感器原理
2017年,Jung Jin Park[26]证明了由磁致伸缩纳米线Fe-Ga/Cu NWs 和GMR 传感器组成的传感器的压力传感能力。通过将垂直排列的多层Fe-Ga/Cu NWs 阵列压在GMR 传感器面上,接触压力的变化会导致NWs 的偏转发生变化,根据逆磁致伸缩效应,周围磁场会发生变化,使得GMR 电路的电阻会发生变化,传感器灵敏度的估计值为1~4 mΩ/kPa。基于GMR 传感器的小型化,当一侧尺寸小于40 μm 时,将可能达到人类指尖的空间分辨率。
3 现有问题与未来展望
3.1 现有问题
本文介绍了磁致伸缩触觉传感器近年来的一些研究进展,涉及基于Galfenol 的各种类型触觉传感器、新材料和新工艺的磁致伸缩触觉传感器的发展,以及其优势所在。根据现阶段的磁致伸缩触觉传感器的发展,还存在以下拟解决的问题:
(1)磁滞问题
铁磁材料普遍存在磁滞特性,在磁致伸缩触觉传感器中可能会存在磁滞非线性现象,导致正、反行程存在误差。为解决磁滞问题可以选取线性段较好的区间作为传感器工作范围,不过这样会导致传感器测量范围变小;另一种方式是建立相应的磁滞模型,在数据处理时进行在线补偿,这种方法对传感器数据处理能力要求较高。
(2)抗干扰
由于磁致伸缩触觉传感器工作原理,传感器对外界的磁场非常敏感,所以针对磁致伸缩触觉传感器的使用环境,需要着重考虑是否有额外的磁场干扰。针对这一问题,可以考虑在传感器制作时添加隔磁材料,或者添加特殊的导磁材料以增加传感器的抗干扰能力。
3.2 未来展望
传感器作为智能化与外界信息交互的硬件基础,对于磁致伸缩触觉传感器,为了能更好地应用于机器人、生物医疗、智能穿戴等领域,可以从以下几个方面展开深入研究:
(1)微型化以及阵列化设计。将传感器微型化,在同样体积下能实现更多数量、更密集的传感器阵列,从而能实现更细微的测量,做到全方位、多触点对目标物体进行识别;
(2)柔性化。对不规则的物体进行识别,将磁致伸缩触觉传感器实现柔性化是趋势所在,能更方便和更高效的实现全方位触觉感知;
(3)复合型新材料,将磁致伸缩材料与其他材料结合或利用现阶段不断发展的工艺和光刻技术生成复合型新材料,使传感器机械性能或灵敏度得到优化,后续可以从传感器的多功能性、灵敏度、微型化、高稳定、低迟滞性、全柔性和微型化等方面开展,应用复合型新材料为实现传感器的创新与发展提供方向。
