不同对流层模型对机载精密单点定位的影响分析
2022-12-26董建权郭将栗广才罗锋
董建权,郭将,栗广才,罗锋
(1.武汉大学 测绘学院,武汉 430079;2.自然资源部航空地球物理与遥感地质重点实验室,北京 100083;3.武汉大学卫星导航定位技术研究中心,武汉 430079)
0 引 言
精密单点定位(PPP)是指利用载波相位观测值以及精密卫星星历和卫星钟差来进行高精度单点定位的方法[1].与相对定位不同,PPP 采用单台全球卫星导航系统(GNSS)接收机,使用精密产品,同时采用精细化改正模型、参数估计或通过组合观测值的方法对误差进行改正,以达到高精度定位的目的.由于PPP 无需参考站提供差分值,也就摆脱了距离的限制[2].因此,PPP 技术在低轨卫星定轨[3]、变形监测和灾害预报[4-6]、航空测量[7]等领域取得了广泛应用.
对流层延迟是GNSS 定位的主要误差源之一,其在天顶(U)方向延迟约为2~3 m,在高度角为10° 时的延迟约为20 m[8].其中,对流层延迟对高程方向定位精度影响最大,而高程测量误差又是航空重力测量误差的主要影响因素[9].因此,削弱对流层延迟对PPP 在航空重力测量等领域的应用极为重要.目前,国内外学者对不同对流层延迟改正策略进行了诸多研究,闫志闯等[10]利用分布全球的10 个国际GNSS服务(IGS)站数据分析了三种对流层参数估计方法对PPP 定位精度的影响,得出了单参数方法在U 方向的定位精度与分段常数法相比,最大差异超过了1.5 cm,而附加随机漫步过程约束的分段常数法与分段常数法定位精度相当的结论;翟树峰等[11]利用分布于不同区域的IGS 站的观测数据,比较了不同对流层映射函数对PPP 定位精度的影响,发现VMF1模型和GMF 模型的定位精度相似,而NMF 模型定位精度不如前两者,并且模型差异会随季节发生毫米级的变化;熊聚中[12]研究了估计对流层折射的随机过程方法,提出了一种基于GPS 网的随机过程方法用于对流层延迟改正,同时也给出了基于最小二乘估计的实现方法,并分析了随机过程中的参数影响和选择范围.但是,目前对流层延迟改正方法的研究主要利用IGS 测站的静态观测数据,而对流层模型在机载PPP 的性能还没有被评估过.因此,本文利用机载数据,分析了GMF、NMF、VMF1、VMF3 作为映射函数,以及作为随机游走噪声(RWN)参数对PPP 的影响.
1 对流层延迟改正
1.1 基本原理
当卫星信号通过对流层时产生折射,传播速度变慢,传播路径弯曲.若真空中的折射系数n为1,则对流层延迟计算公式为
式中:n为对流层中某处的大气折射系数;ray 和 vac 分别为信号的实际和理论(沿直线)传播路径;τ 为路径弯曲,通常可忽略[13].
由于 (n-1) 的数值很小,为方便计算,常令N=(n-1)×106,并将N称为大气折射指数.大气折射指数N可分为流体静力学部分(干气部分)Nd和非流体静力学部分(湿气部分)Nw.相应地,对流层延迟可表示为

式中:ρd为对流层延迟干分量,主要由干燥气体折射产生,占整个延迟量的80%~90%;ρw为对流层延迟湿分量,主要由水蒸气折射产生,占整个延迟量的10%~20%.干分量部分通常采用对流层模型进行改正.而湿分量部分极不稳定,在U 方向上的变化可能达到6~8 cm/h,是干分量的3~4 倍[14],难以完全用数学模型去描述,因此在PPP 中常将其作为待估参数求解.
此外,信号传播路径上的对流层延迟可以表示为天顶对流层延迟(ZTD)与投影函数(MF)的乘积,其中,ZTD 是天顶干延迟(ZHD)和天顶湿延迟(ZWD)之和.故(2)式可表示为

式中:E为卫星高度角;ρZHD和 ρZWD分别为天顶对流层干延迟和天顶对流层湿延迟;md(E) 和mw(E) 分别是相应地干延迟和湿延迟的投影系数.
目前的GNSS 定位一般选取Hopfield[15]、Saastamoinen[16]等模型作为天顶对流层改正模型,再采用合适的映射函数转换至非U 方向,其常用的投影函数有Marini[17]、NMF[18]、GMF[19]等模型.关于对流层改正模型已有许多文献研究,本文主要介绍参数估计法和不同映射函数对PPP 的影响.
1.2 参数估计方法
由上述可知,湿延迟在时间和空间上都不稳定,通过模型只能改正约70%的影响,仍存在一部分残差无法消除.对于高精度定位而言,剩余的残差仍有较大的影响.这些残差可以用一个一阶高斯-马尔可夫过程来描述

式中:τρ为随机过程的相关时间;W(t) 是方差为 σ2W的零均值高斯白噪声

式(1)~(4)的离散解为

式中,
当 τρ→∞ 时,一阶高斯-马尔可夫过程即变为随机游走过程

文献[14]表明:随机过程估计是目前最理想的对流层折射估计模型,且对于随机游走过程估计来说,σW的选择对定位结果有一定的影响.故本文针对不同噪声参数对PPP 定位结果的影响进行了对比分析.
1.3 映射函数
在PPP 中,映射函数用于将U 方向上的ZTD 投影到传播方向上,其性能好坏直接影响PPP 的定位精度.随着国内外学者的研究,目前最常用的映射函数主要有:NMF 模型、VMF 系列模型和GMF 模型,下面分别进行介绍.
1.3.1 NMF 模型
NMF 模型是由Neill 在1996年建立的全球模型[18],该模型中的映射函数由干分量映射函数md和湿分量映射函数mw两部分组成.其中,干分量映射函数md的计算公式为
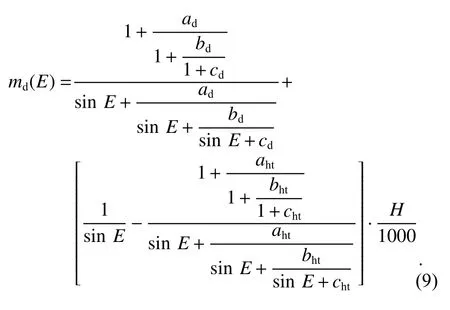
式中:E为高度角;H为正高;通过最小二乘法拟合九个仰角的高度校正得到的高程修改系数:aht=2.53×10-5;bht=5.49×10-3;cht=1.14×10-3.系数ad、bd、cd可由式(10)内插后求得

式中:φ为测站纬度;t为年积日;p为系数ad、bd和cd;p0和p1分别为干延迟系数的年平均值和振幅.计算距离测站最近纬度的干延迟系数,如表1所示,最后通过线性插值得到测站处的系数.当测站纬度低于15°或高于75°时取临界值,不需要进行插值[20].
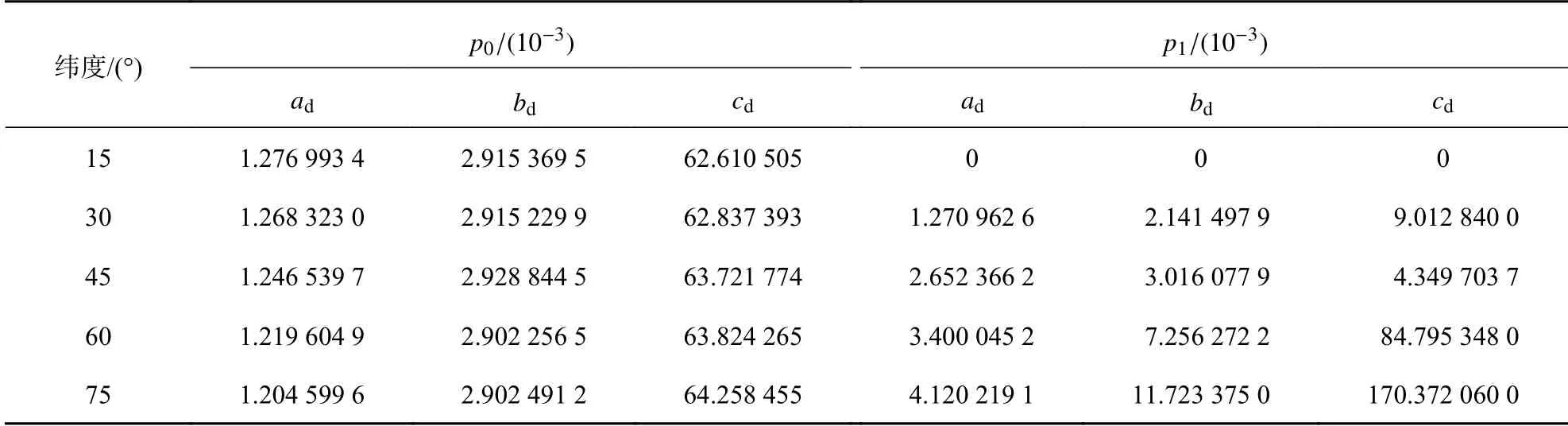
表1 干分量投影函数系数表
湿分量的映射函数mw的计算公式为
当测站纬度在15°~75°时,对于湿分量的系数aw、bw、cw来说,由于没有季节变化,因此可直接通过查表2得到分段纬度湿延迟系数,然后对测站进行插值.
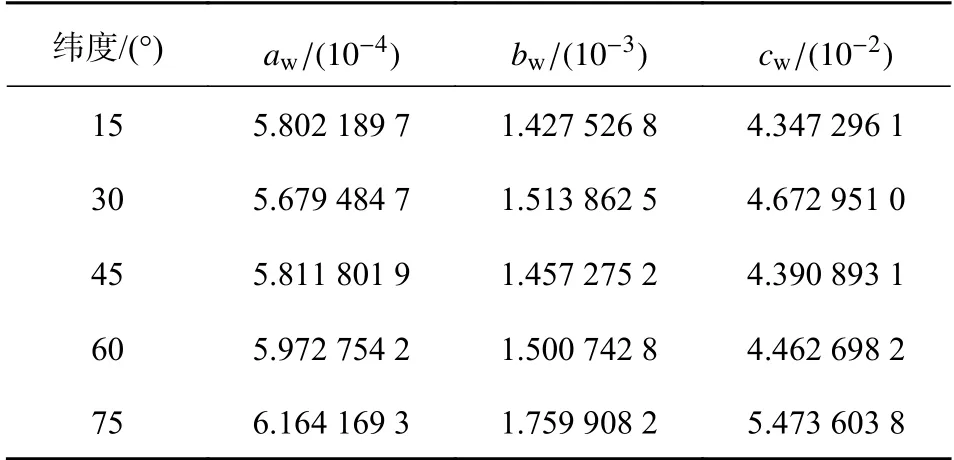
表2 湿分量投影函数系数表
1.3.2 VMF 系列模型
VMF 系列模型是由奥地利维也纳理工大学BOEHM 等[19]所建立.从早期的VMF 模型[21],逐渐发展为VMF1 模型[22]以及VMF3 模型[23],其形式与NMF 类似,区别就是系数的取值不同.
1) VMF1 模型
VMF1 中的系数ad和aw是该大学依据实测气象资料而生成的格网图来提供的,用户可以从网站上下载,内插后使用,但存在34 h 的延迟.而系数bd、cd则是根据欧洲中尺度天气预报中心(ECMWF)的气象资料求得.其中bd为常数,取0.002 9,cd用式(12)计算:
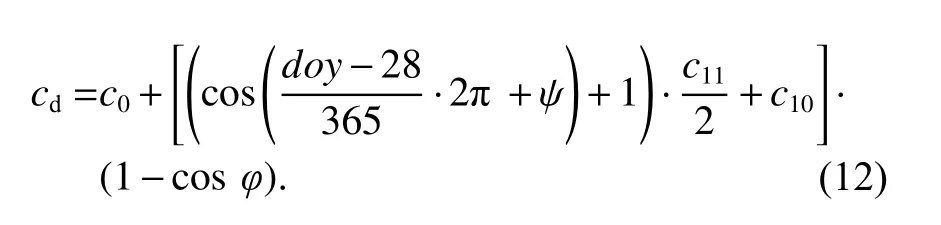
式中:c0=0.062,而c1、c2和φ根据测站位置进行选择,当测站位于北纬地区时,c10=0.006,c11=0.000,ψ=0;当测站位于南纬地区时,c10=0.006,c11=0.001,ψ=π.bw和cw采用NMF 湿延迟映射函数在纬度为45°处的值,即bw=0.001 46,cw=0.043 91[24].
2) VMF3 模型
Landskron 等在2018年提出了VMF3 模型[23],VMF3 在低卫星高度角延迟等方面更优于VMF1.其中,干湿系数b、c的计算公式为
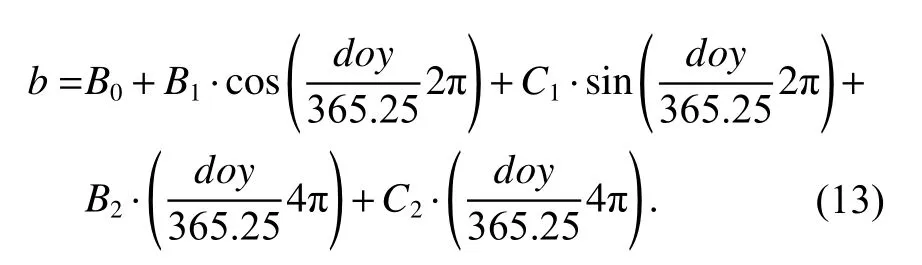
式中:B0为年平均值;B1和C1为年振幅;B2和C2为半周年振幅.VMF3 中的ad和aw可以从网站上下载,也可以直接通过GPT 模型得到,便于进行实时定位.
1.3.3 GMF 模型
为解决VMF1 的时延问题,BOEHM 等[19]又提出了GMF 模型.它借鉴了NMF 模型中的做法而具有较好的精度,又解决了VMF1 的时延问题[25].GMF模型与NMF 模型的区别在于系数不同.在GMF 模型中,ad和aw的计算公式为

式中:doy是以1980年1月1日为起始历元计算得到;A0为年平均值;A1为周年振幅,均利用9 阶球谐函数展开.bd和cd、bw和cw的计算公式与VMF1 模型相同.
2 实验分析
2.1 数据获取及解算软件
本文采用机载动态数据,数据来源于海南省机载实验,实验路径全长约500 km,具体飞行路径如图1所示.飞机搭载NovAtel GPScard 接收机,采集时段从2021-03-27 UTC 06:29:00—11:50:00.
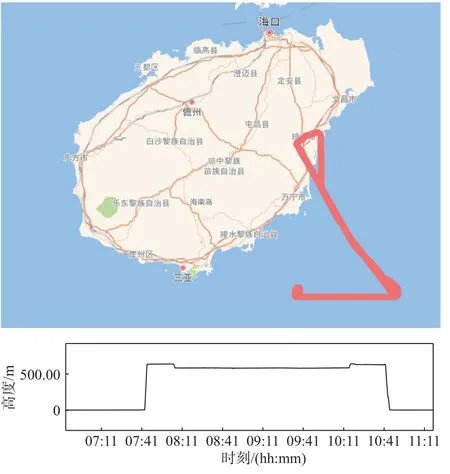
图1 2021-03-27 机载实验路径示意图
在数据处理时,考虑到双差解算的定位精度和稳定性整体优于非差解算[26],使用RTKLIB 软件双差解算结果作为坐标的真值参考值.此外,由于飞机和基准站的高差较大,本研究在基线解算时设置了更大的对流层参数过程噪声来提高双差模糊度固定成功率,最终基线解模糊度固定成功率达到99.3%,因此可将其作为可靠的参考值使用.然后使用PRIDE PPP-AR 软件处理动态数据.该软件可应用于动态移动平台,适用于航空摄影测量、船载重力测量等,可满足本实验解算需求.
2.2 数据处理方法
本文旨在研究不同映射函数对PPP 结果的影响,同时也探究了随机游走噪声的选择对定位精度的影响.在数据处理时,以相对定位结果作为参考真值,基线解模糊度固定成功率达到99.3%.然后使用PRIDE PPP-AR 软件处理数据,为研究不同映射函数对定位结果的影响,分别选取GMF、NMF、VMF1 和VMF3 作为映射函数进行解算.而实际应用表明,随机游走参数一般取1 0 ~30 mm/比较合适[14].考虑到对流层延迟对高程比较敏感,且载具运动范围较大,故本文扩大参数的范围,选取作为随机游走噪声参数,以适应对流层大幅度变化的情况.
解算时位置当作白噪声(WN)参数来估计,每历元以标准单点定位解作为初值;接收机参数也当作WN 参数估计,噪声给定为 9 000 m/;电离层延迟通过无电离层组合消除;需要注意的是由于飞行速度很大,其所处对流层环境变化剧烈,因此本研究采用了每历元单独估计对流层参数的策略,具体解算策略如表3所示.
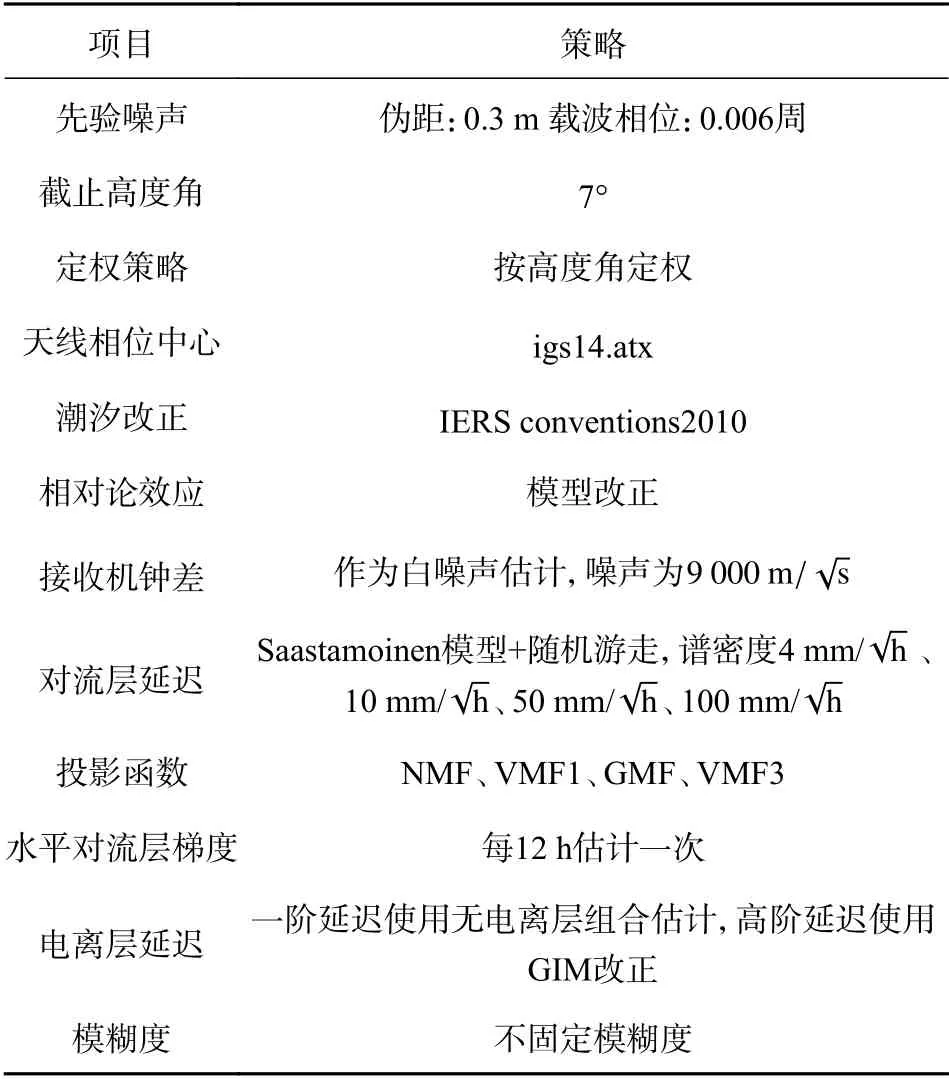
表3 PPP 解算策略
2.3 位置精度对比分析
1)不同模型对定位精度的影响
对获取的数据进行PPP 解算,分别选取GMF、NMF、VMF1 及VMF3 作为映射函数.图2显示了不同映射函数下东(E)、N、U 三个方向误差序列,表4显示了不同模型在三个方向定位偏差的均方根(RMS)值.可以看出,四种模型的定位结果大致相同,均在零值附近波动,能起到较好地改正效果.但基于经验模型GMF 与NMF 的PPP 对流层估值由于没有考虑气压、湿度、地形等信息,其估值非常平稳,只在飞机起飞降落时有“突变”,并没有很好地描述长距离飞行过程中的对流层变化趋势.相应地,其高程方向定位误差偏大,仅为14.13 cm.
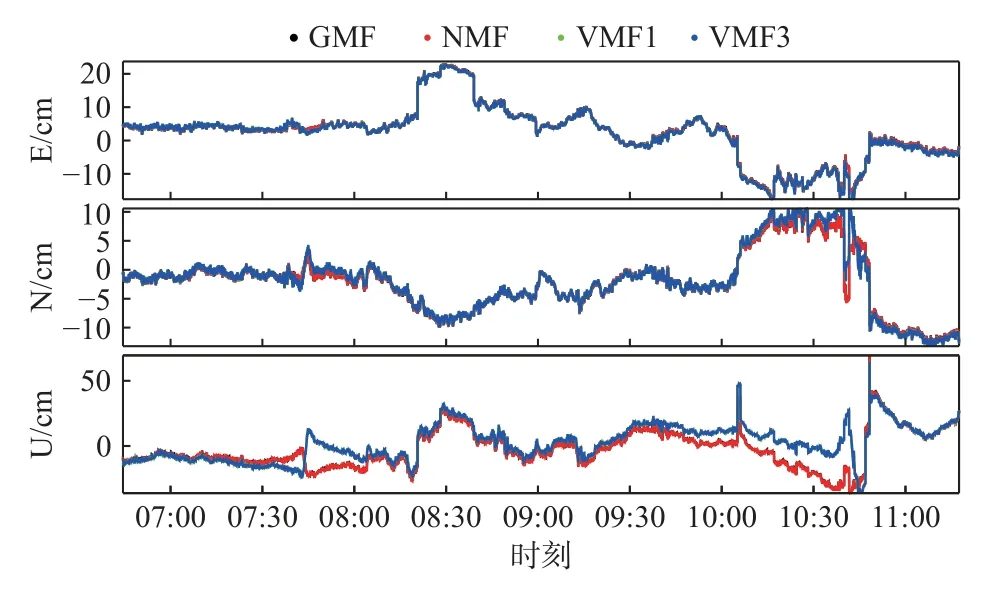
图2 GMF、NMF、VMF1、VMF3 模型定位结果图
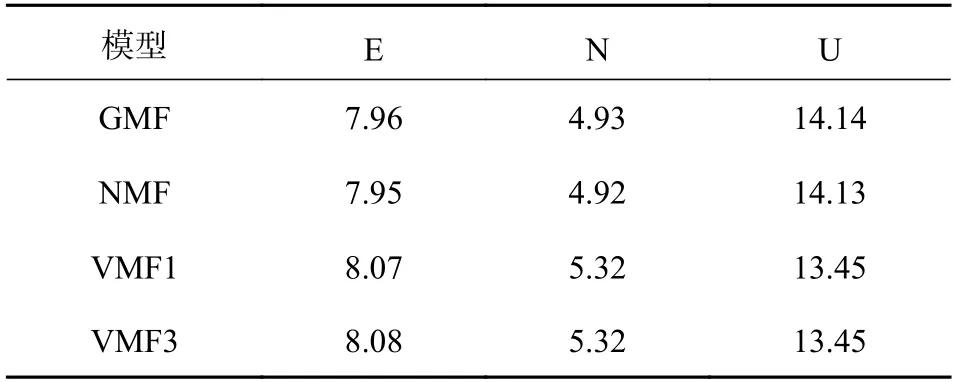
表4 不同模型在E、N、U 方向定位偏差的RMS 值 cm
与经验模型不同的是,基于精度更高的干分量、湿分量改正的VMF1 和VMF3 在对流层变化剧烈的环境中具有更好的表现,对流层估值相比经验模型描述了更多“变化细节”.相应地,基于VMF1 模型的PPP 高程方向定位精度达到了13.45 cm,相比GMF模型提高了5%.但在N 方向VMF 模型定位结果较GMF 降低了8%.
2) RWN 对定位精度的影响
为对比RWN 对定位精度的影响,分别设置随机游走过程的噪声参数 σ 为映射函数均为VMF3 模型.图3显示了不同噪声参数下E、N、U 三个方向的定位结果与真值偏差的时间序列,表5显示了不同模型在三个方向定位偏差的RMS.可以看出,随着 σ 选取的增大,E 和N 方向的定位精度均有所提高并趋于稳定,但 σ 的值过大时,U方向的定位精度则会降低.这说明 σ 的选取对定位精度有一定影响,针对不同需求需选择合适的 σ 值.
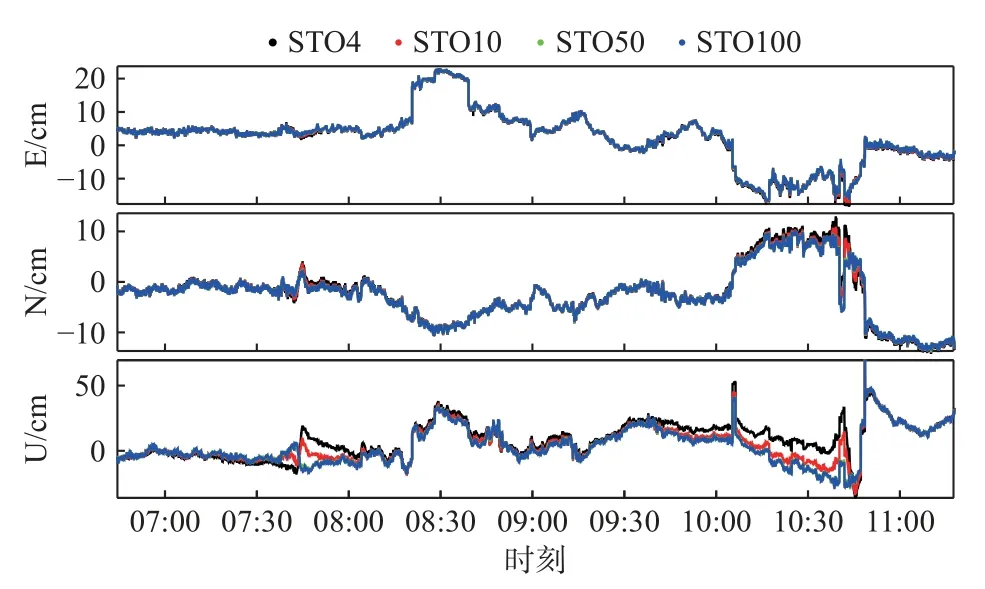
图3 不同RWN 下PPP 在E、N、U 方向定位结果
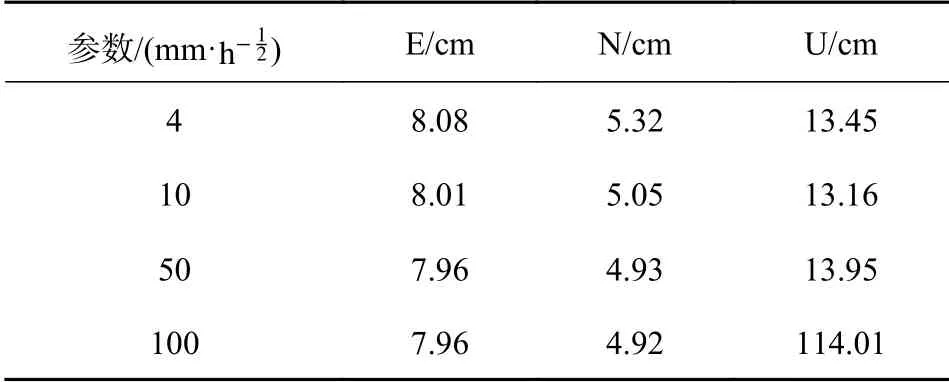
表5 不同RWN 下PPP 在E、N、U 方向定位偏差的RMS 值
此外,从上述结果可以看出,不同对流层模型对U 和N 方向定位结果的影响较大,分别达到约3 mm 和4 mm,对E 方向定位结果影响最小,仅有约1 mm.
2.4 ZTD 对比分析
将所得到的数据经PRIDE PPP-AR 软件处理后,得到了不同模型下的ZTD、ZHD、ZWD 的值,如图4所示.对比不同模型发现,相比GMF 和NMF 模型,采用VMF1 和VMF3 模型的ZHD 较平稳,未能反映飞机起飞降落时的变化;而对于ZWD 来说,四种模型均能在反映飞机起飞降落时的变化,但VMF1 和VMF3 模型变化较平滑,GMF 和NMF 模型变化较剧烈.
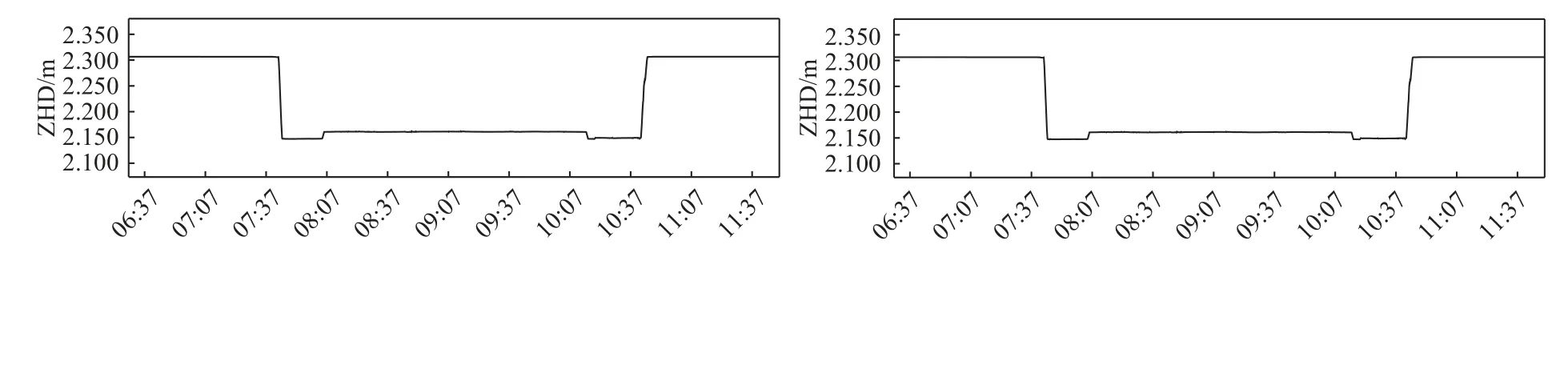
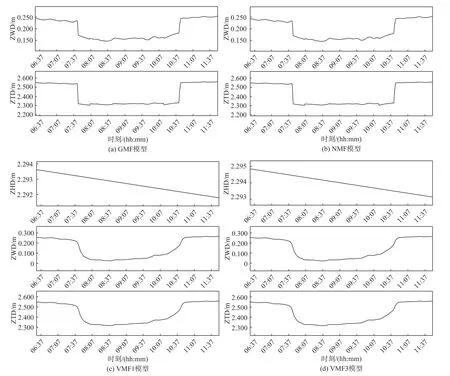
图4 四种模型的ZHD、ZWD、ZTD 值
而对比不同噪声发现,噪声选取对ZTD 估值具有一定影响,噪声选取越小,ZTD 越平滑,反之则越粗糙,如图5所示,选择10 mm/既不会因 σ 太小导致不符合实际,也不会因 σ 太大导致畸变.
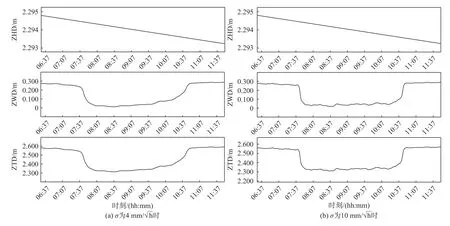
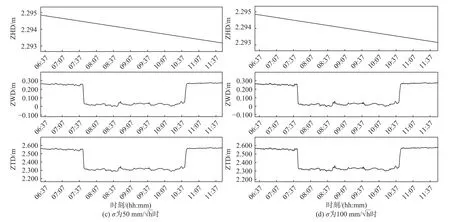
图5 不同随机游走噪声下E、N、U 方向的ZHD、ZWD、ZTD 值
2.5 验后残差对比分析
图6绘制了不同模型定位后相位残差和伪距残差.可以看到,对于伪距残差,几种模型的结果基本相同.而对于相位残差,VMF1 和VMF3 模型较GMF和NMF 模型更大,采用1 0 mm/的噪声后相位残差有所减小,但还是不如GMF 和NMF 模型.
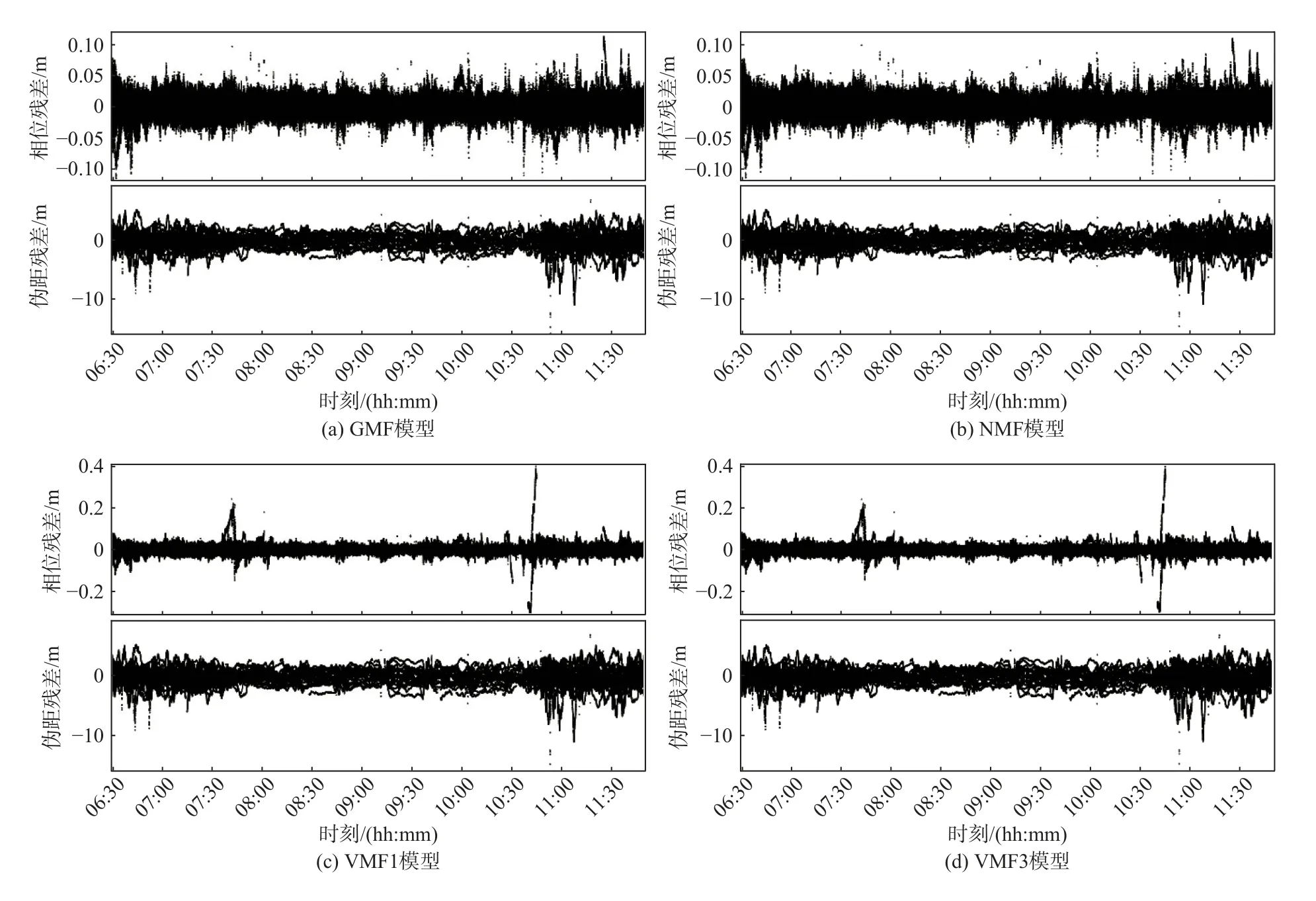
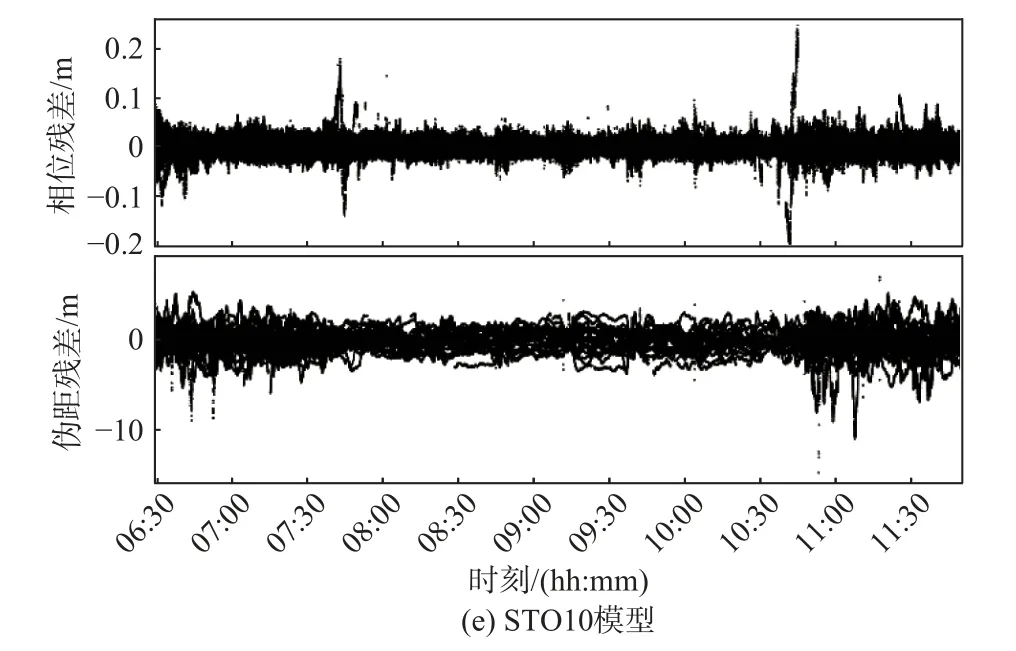
图6 五种模型的残差图
为进一步研究,表6和表7记录了不同模型下相位残差和伪距残差的最大值(Max)、最小值(Min)及GPS、GALONASS、北斗卫星导航系统(BDS)三个卫星系统的RMS 值.对比发现,不同模型伪距残差仅存在毫米级的差别,而相位残差存在分米级的差别.其中,VMF1 和VMF3 模型结果较差,RMS 值也略大.
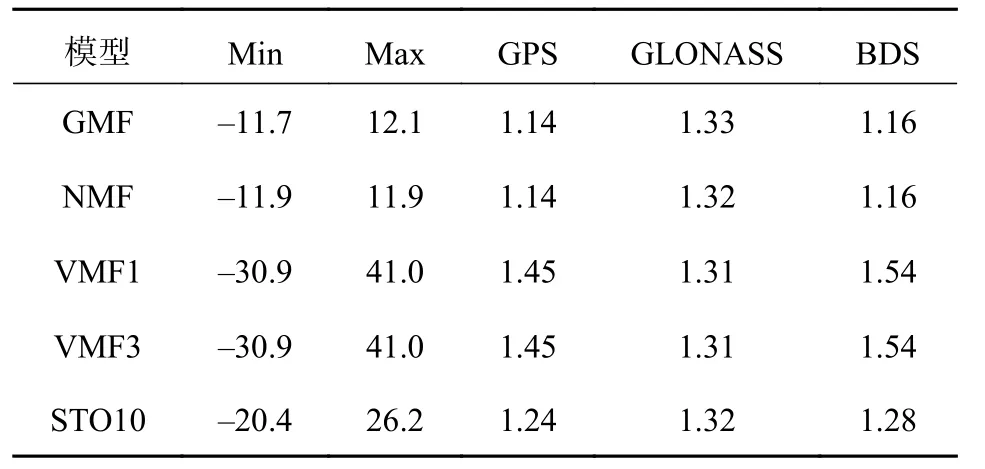
表6 相位残差的Max、Min 及GPS、GALONASS、BDS 三个卫星系统残差的RMS 值cm
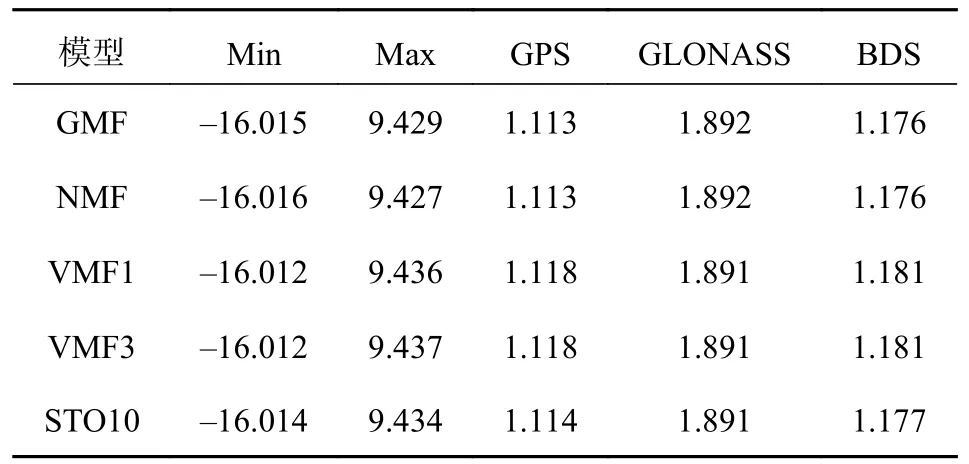
表7 伪距残差的Max、Min 及GPS、GALONASS、BDS 三个卫星系统的RMS 值m
经检查后发现,数据中的G09、C09 号卫星残差结果偏差过大,从图6中也可以看出VMF 系列相位残差中有卫星异常突起.这两颗卫星在观测弧段平均高度角约30°,推测残差异常是VMF 系列映射函数与GMF 在低高度角卫星处理上的差异导致.
3 结束语
本文利用开源的PRIDE PPP-AR 软件对机载实验获得的数据进行处理,以相对定位结果作为真值,对比了不同对流层模型、参数估计模型对定位精度的影响.结果表明:
1)不同对流层模型对N、U 方向定位结果影响较大,分别达到约3 mm 和4 mm,对E 方向定位结果影响最小,仅约有1 mm.
2)四种模型均能满足机载PPP 定位需求,获得水平厘米级、高程约1~2 dm 的定位精度.其中,VMF1和VMF3 模型定位结果基本相同,GMF 和NMF 模型定位结果基本相同.此外,VMF1 和VMF3 模型在高程方向上定位精度优于GMF 和NMF 模型,提高约5%,但在N 方向VMF 模型定位结果较GMF 降低了8%.因此,针对不同需求应采用合适的对流层模型进行改正,以满足用户的定位需求.
