油气管道线路图像智能识别技术应用研究
2022-12-23王洪超杨启明马云宾
王洪超,杨启明,李 冰,齐 晖,马云宾,魏 来
(1.国家管网集团科学技术研究总院,河北 廊坊 065000;2.国家管网集团北方管道有限责任公司,河北 廊坊 065000)
0 引 言
我国油气管道建设经过多年高速发展,已经建成覆盖全国的油气管道骨干网络,截至2020年底,中国长输油气管道总里程累计约14.4万公里,管道线路途径区域广,自然、人文环境千差万别,管道长期存在地质灾害(滑坡、泥石流等)、第三方活动和打孔盗油等外来因素导致管道损坏的风险[1]。如2003年12月19日,兰成渝成品油管道广元至绵阳段由于打孔盗油分子的破坏发生重大泄漏(图1),泄漏处油柱高达40 m,使宝成铁路中断达7 h之久,管道停输14 h,附近的清江河有500 m河面被污染,直接经济损失448万元。

图1 兰成渝管道打孔盗油破坏现场
目前,我国油气管道线路保卫以人工巡线作为主要方式,部分地区还会采用直升机或无人机巡线的方式进行补充,这种定期巡检的方式时效性差,无法在第一时间发现风险,维抢修滞后,导致小风险转化为大事故。为及时发现第三方施工、打孔盗油等潜在的管道威胁事件,防止发生严重事故,部分管道运营公司选择在环境敏感区、人员密集区和打孔盗油高发区等重点区域安装固定摄像头,通过实时回传摄像头视频或报警信息的方式实现区域不间断24小时人工监视[2-6]。近年来,以深度学习为代表的人工智能技术在图像识别领域取得了突破性进展,对物体的分类准确度已经达到甚至超过了人的水平。基于深度学习技术在目标检测的应用中相继出现了Faster R-CNN、SSD和YOLO等算法,这些算法具有较高的检测准确率,达到了工业应用的要求。因此,将人工智能技术在目标检测中的成果应用到管道线路保卫中,成为了近期的研究热点。
1 线路视频的检测对象
管道线路面临的威胁主要有地质灾害、第三方活动和打孔盗油等,地质灾害可以利用其他技术手段进行监测,不在视频检测的研究范围内;打孔盗油活动是对管道的人为破坏;第三方活动主要是工业、农业生产,如机械挖掘、定向钻和土地深耕等。如果不采取有效的监管措施,这些活动极易引起管道防腐层、管体和伴行光缆等的损坏,影响管道正常输送,甚至造成管道泄漏。随着经济的发展,产生了与工业、生活等人口密集区重叠或交叉的管段(图2),这些区域第三方活动更加频繁,管道被破坏的风险更大。因此,为有效防范管道输送过程中由第三方引起的事故发生,需要从视频中检测出人、施工车辆和机械(图3),提前发现管道面临的潜在威胁。

图2 邻管道的工业区和农田

图3 管道上方的施工
2 线路图像智能识别算法
从线路视频中检测出人、施工车辆和机械属于目标检测范畴。目前主流的目标检测算法大多基于深度学习技术,主要分为两类:
(1)二阶段目标检测算法,该类算法分2个步骤进行目标检测,首先生成潜在的候选区域,然后对候选区域中的目标进行分类,典型算法有R-CNN系列算法[7];
(2)一阶段目标检测算法,该类算法省去了候选区域的选择,直接从输入图像中得出目标类别和位置坐标,典型算法有YOLO、SSD[8]。与二阶段目标检测算法相比,一阶段目标检测算法通常速度更快,选择YOLOv3算法[9-12]用于线路视频的目标检测。
YOLOv3算法的基础网络为Darknet53,利用卷积层对输入图片降采样,可实现大中小3个尺度下目标类别和位置的预测,如图4所示。应用中首先将输入图像分辨率调整为448×448,再由网络进行运算获得不同尺度下的检测结果,检测结果包括目标类别和目标边界框。边界框包含5个值:x,y,w,h和置信度,其中,(x,y)表示边界框的中心点坐标,w表示边界框的宽度,h表示边界框的高,置信度表示边界框内含有预测目标类别的概率。由于网络会生成10 647个边界框,存在很多相似或无效的结果,因此采用非极大值抑制的方法对不同尺度下的预测值进行筛选,得到最终的检测结果。

图4 识别算法的基本网络结构
3 线路图像智能识别系统
管道线路点多线长,存在大量第三方活动频繁的区域。为提升管道的安全防护水平,筛选出风险等级高的重点区域安装了线路摄像头,实时检测周边环境,及时发现疑似威胁。管道线路处于野外,气象、昼夜等环境因素变化大,摄像头普遍选择了具有红外功能的星光级高清摄像头,以保证低照度环境下的成像质量。由于野外缺少供电,摄像头安装时自建了微型太阳能供电系统,利用4G无线通信上传报警、图像等数据。管道线路重点区域安装的摄像头如图5所示。

图5 管道线路重点区域安装的摄像头
管道线路摄像头仅能检测到移动物体,无法识别出物体的种类,日常应用中会产生大量因风吹植被引起的误报警。为降低误报警次数,需要对摄像头报警信息进行二次识别。实际应用中,考虑到上传视频信息会带来大量通信流量的浪费,首先设置摄像头自带识别功能,检测移动的物体,仅将摄像头监测到报警后抓拍的图片上传至管理平台,再由管理平台将报警图片推送至智能识别模块进行二次识别。智能识别模块中运行智能识别算法对输入图片进行分析,最后将分析结果反传至管理平台实现管道线路威胁事件的识别。线路图像智能识别系统架构及系统界面如图6、图7所示。

图6 线路图像智能识别系统架构

图7 线路图像智能识别系统操作界面
为验证应用效果,在实际管道对线路图像智能识别系统进行了超过1年的运行测试。测试表明,线路图像智能识别系统对管道沿线的工程车、农用车、普通车辆和人员具有较高的识别准确率(图8),可以对摄像头自动报警结果进行二次识别,在不漏报的前提下提高了报警的准确性,可将摄像头的单日报警数量降低约65%(图9、图10)。
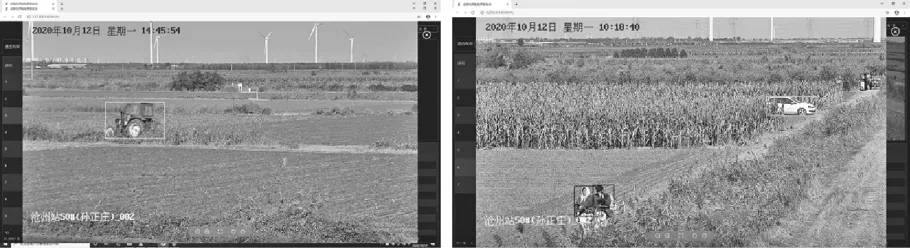
图8 线路图像智能识别系统检测到的车辆、人员

图9 摄像头的单日报警记录

图10 二次识别后的单日报警记录
4 结 语
采用视频智能识别技术对摄像头报警信息进行二次识别,可有效提高油气管道线路威胁事件的报警准确率,降低人工核实的劳动强度,提升管道线路重点区域视频监视的效果。目前,北方管道公司主要高风险管段实现了视频监控全覆盖,可24小时全天候无死角预警监控。预计到2022年,摄像头总数将达到4 000个,普及视频智能识别技术可弥补摄像头识别能力弱的缺点,提升管道线路安全防护的智能化水平。
