分布式协同微纳遥感星群的智能控制系统关键技术
2022-12-17刘付成韩飞韩宇武海雷李木子史可懿
刘付成,韩飞,韩宇,武海雷,李木子,史可懿
分布式协同微纳遥感星群的智能控制系统关键技术
刘付成1,韩飞2,3,韩宇2,3,武海雷2,3,李木子2,3,史可懿4
(1.上海航天技术研究院,上海 201109;2.上海航天控制技术研究所,上海 201109;3.上海市空间智能控制技术重点实验室,上海 201109;4.西安电子科技大学 通信工程学院,陕西 西安 710071)
近年来,国内外微纳遥感星座发展不断加速,通过高频重访大幅提升了对地观测的时间分辨率,但是由于单颗微纳卫星观测能力受限,难以满足多源同步与融合、高品质、大幅宽等数据应用需求。为此,将星座与星簇相结合,以星座化分布满足高时间分辨率需求,以星座节点上的星簇协同观测获取多源、高品质、宽幅数据,构建基于微纳卫星的分布式协同遥感系统,是兼顾上述遥感应用需求的有效途径。智能分布式协同控制是该系统的核心关键,为此,必须研究解决星座+星簇大规模动态微纳遥感星群控制系统的分布协同自主导航、智能运动规划与控制、智能健康预测与管理、智能组网等关键技术难题。在梳理分析国内外分布式微纳遥感系统的基础上,给出分布式协同微纳遥感星群的概念内涵,分析其特有的四方面难题,梳理总结相关技术发展现状与趋势,以期为后续该方向的研究起到一定的借鉴作用。
分布式协同遥感;自主导航;智能规划控制;智能健康管理;智能组网
0 引言
经过数十年发展,我国已经形成“风云”[1]、 “海洋”[2]、“高分”[3]等为代表的气象、海洋和陆地等全系列遥感卫星体系。未来智慧城市、防灾减灾、生态环保等更广泛、更便捷的遥感数据应用需求,使得空间对地观测系统不仅需要实现小时级快速过顶的高时效应急观测,而且要求过顶时实现更多目标、更大幅宽、更多角度、更长时间的高效能灵活观测。近年来,国内外广泛建设的基于微纳卫星的遥感星座,通过微纳遥感卫星的批量化研制和全球轨道分散部署,可在有效约束成本的同时大幅缩短重访周期,从而满足高时效应急观测需求。但是,每次过顶仍然采用单星观测,受限于微纳卫星资源受限下的有限观测能力,微纳遥感星座无法满足高效能灵活观测的需求。
针对该问题,本文将高重访星座和自主协同星簇相结合,提出基于微纳卫星的分布式协同遥感星群系统。该系统通过全球星座的轨道分布,实现小时级快速重访;通过星座节点上星簇的多星自主协同,实现多视场、多角度、多谱段的多模式协同观测;通过多源异质数据融合提升微纳卫星遥感数据品质,弥补微纳卫星单星观测能力的不足。同时,兼顾高时效、高效能观测需求,代表未来空间对地观测系统的重要发展方向。
分布式协同微纳遥感星群存在卫星成员数量众多、空间分布关系复杂时变、协同观测模式复杂多样等特点,不能仅依赖传统地面测控,必须具备极强的智能分布式协同控制能力,由此带来大规模动态星群控制系统的分布协同自主导航、智能规划与控制、智能健康预测与管理、智能组网等关键技术难题。
本文第1章首先介绍了对国内外微纳遥感系统现状与发展趋势的调研分析,明确分布式协同微纳遥感星群系统是未来的发展趋势,并对该系统的总体方案进行阐述,结合星群控制系统特点,提出4个关键技术难题。第2~5章对分布式协同微纳遥感星群控制系统的分布协同自主导航、智能规划与控制、智能健康预测与管理、智能组网四方面关键技术难题的具体内涵分别进行介绍,进而梳理总结相关技术的发展现状和趋势,并在论文最后进行总结,为分布式协同遥感星群控制系统的后续研究提供参考。
1 分布式协同微纳遥感星群
1.1 国内外微纳遥感系统发展现状与趋势
国际上一般将质量在100~500 kg的卫星定义为小卫星,10~100 kg的卫星定义为微卫星,1~ 10 kg的卫星定义为纳卫星。近年来,微纳卫星以较小的体积质量、较低的研制成本、灵活的发射方式,以及丰富的在轨模式,在卫星领域取得迅猛的发展。基于微纳卫星构建全球遥感星座,具有短时间快速重访、系统成本有效可控等优点,成为当前国内外遥感领域的重要发展方向[4-5],也成为商业航天最先进入的领域,国内外目前已有多个微小卫星遥感星座完成初期部署[6-19]。
美国Planet公司是较早实现微纳光学遥感卫星规模化制造和运营的机构,也是目前国际领域最大的商业遥感数据服务运营商。该公司建设的鸽群星座是目前全球最大规模的遥感卫星星座[6],自2014年发射至今,已形成了200余颗卫星的星座规模。鸽群星座一天就能对全球遥感影像进行一次全面更新,充分体现了微纳卫星星座快速重访、成本可控的明显优势。SkySat卫星星座[7-8]是目前卫星数量最多的亚米级高分辨率卫星星座,具备高清视频成像能力,并可为用户提供目标区域动态变化信息的高时效性图像和视频数据,体现了微小卫星星座应用的多样化灵活观测、功能集成的明显优势。
2015年来,我国在卫星遥感领域也由传统的单星作战向协同组网转变。长光卫星技术有限公司发射和运营的“吉林一号”卫星星座[15]是国内目前规模最大的光学遥感卫星星座。截至2021年9月19日,“吉林一号”卫星星座目前在轨运行29颗卫星,高分卫星可条带拼接、立体成像,视频星可灵巧成像,具备丰富的多模式成像能力。国内高景星座[16]、珠海一号[17]、千乘星座、海丝星座等纷纷提出了建设光学/合成孔径雷达(Synthetic Aperture Radar,SAR)混编遥感微纳卫星星座的计划,不断丰富数据获取手段,提升星座内多谱段观测能力。鸽群和吉林一号拍摄图像如图1所示。

图1 鸽群星座拍摄的图像与吉林一号拍摄的图像
除建立微纳遥感星座外,通过微纳卫星编队飞行也是丰富对地遥感观测手段的一个重要途径。目前各国实现的编队飞行大部分在同一轨道面,卫星数量在2~4颗。例如美国国家航空航天局(National Aeronautics and Space Administration,NASA)发射的地球观测卫星(EO-1)与陆地卫星(Landsat-7)实现粗略双星编队飞行[20],是第一个实际的卫星集群飞行任务。该集群的任务是获取相同地面目标的图像,以对两星的成像系统进行科学对照。德国维尔茨堡大学主持开展的NetSat项目[21]对4颗皮卫星的在轨分布式协同控制等技术开展研究,前期已对卫星在轨通信、自主位姿测定和控制进行了验证,未来该项目还计划通过4颗卫星联合观测实现地球表面立体摄影测量技术,建立目标的3D模型。
总结国内外微纳遥感系统的发展现状,可以得出:
尽管星座布局的微纳卫星遥感系统星座可以大幅缩短重访周期,满足了高时效应急观测需求,但受限于微纳卫星有限观测能力,还不能满足高效能灵活观测的需求。而现有的卫星编队的遥感系统又不能实现快速重访的需求。因此,兼顾高时效、高效能的观测模式是未来空间对地观测系统的重要发展方向。
1.2 分布式协同微纳遥感星群系统概述
针对现有微纳遥感系统存在的对地观测效能受到微纳卫星能力限制的问题,本文提出星座+星簇构型的基于微纳卫星的分布式协同遥感星群。通过星座组网实现全球小时级快速重访,星座内每一个节点为一个星簇,星簇由多颗携带不同载荷的微纳卫星组成,根据不同观测任务需求,星簇内卫星自由组合、自主协同实现分布式对地观测。
系统具备自主运行和智能协同任务响应能力,在收到地面目标的观测指令后,根据观测地点经纬度范围、观测时刻、各节点轨道过顶情况、卫星姿态侧摆角度范围,规划选择执行任务的对应节点星簇,任务星簇收到指令后,成员星通过轨道机动实现不同星簇轨道构型间的重构切换,可实现多目标同步、多视场拼接、长时间接力凝视、多谱段同步、多角度同步、同区域同步等协同观测模式,提升空间覆盖性、时间覆盖性和谱段覆盖性,并可通过多源异质数据融合提升微纳卫星遥感品质。分布式协同微纳遥感星群总体思路如图2所示。
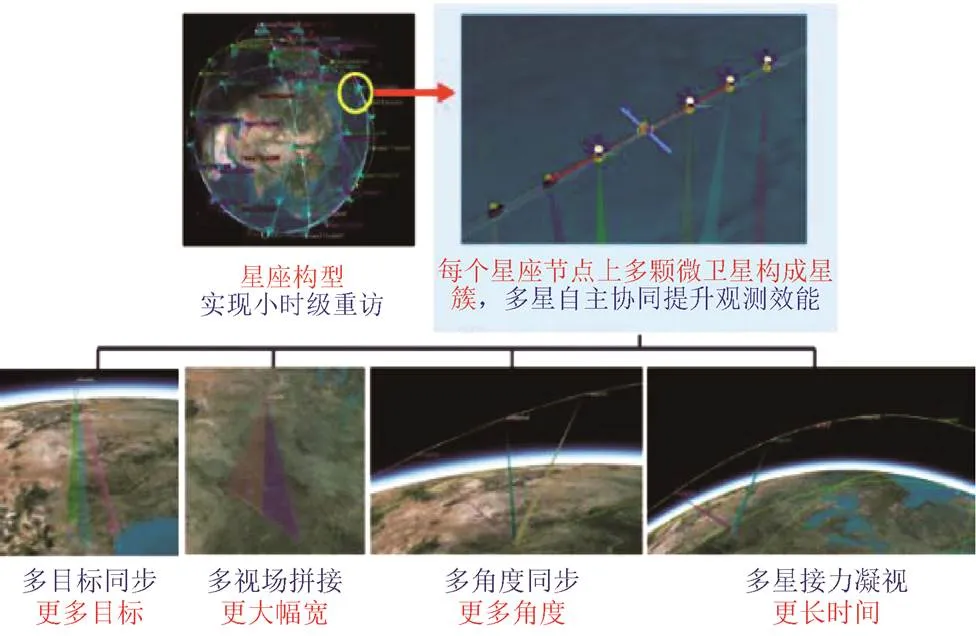
图2 星座+星簇分布式协同微纳遥感星群
以星座+星簇模式构建的分布式协同遥感星群与传统的卫星编队任务不同,卫星成员数量众多、空间分布复杂时变、协同任务复杂多样、相对运动关系复杂,由此带来长期自主安全运行、面向任务自主重构控制、面向复杂系统的高可靠性、协同信息网络交互四方面能力需求,对分布式协同遥感星群控制系统提出协同自主导航、智能规划控制、智能健康管理、智能组网四方面关键技术挑战。分布式协同遥感星群智能控制系统关键技术如图3所示。
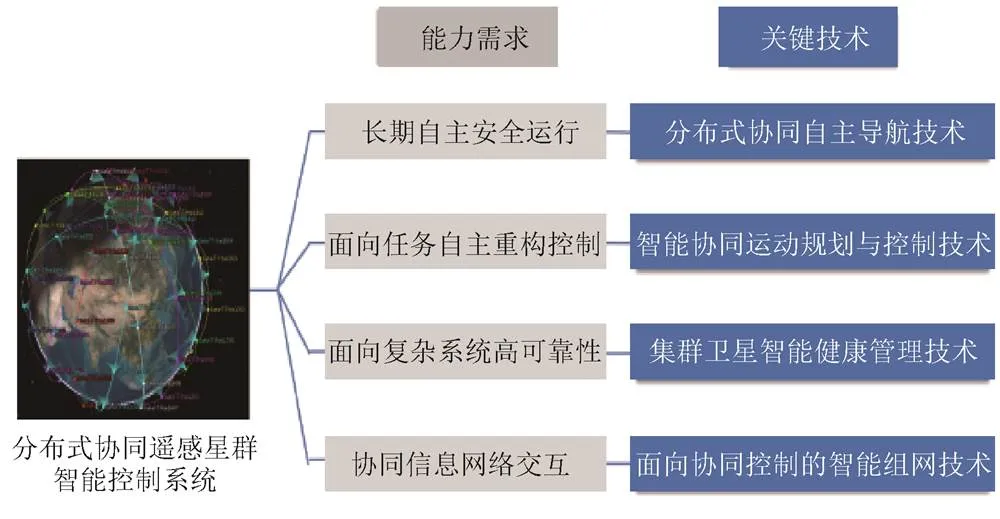
图3 分布式协同遥感星群智能控制系统关键技术
1)分布式协同自主导航技术
大规模星群典型特征为成员卫星数目巨大,传统依赖于地面站的测控方式将导致信息传输量显著增加,地面测控站的负担急剧加重。除此之外,依赖地面站或全球导航卫星系统(Global Navigation Satellite System,GNSS)导航卫星会增加星座内卫星在遇到干扰或者通信导航系统故障时的安全风险,减弱航天器的生存能力,影响星座组网功能,极端情况导致密集分布卫星存在碰撞风险。因此,大规模星群需要具备无外部系统支持下的长期自主导航能力。与利用地基观测站点和天基导航星座的导航方式相比,自主导航只需依靠航天器自身携带的敏感器,保证了巨型星座对自主性和安全性的需求。
2)智能协同运动规划与控制技术
分布式协同微纳遥感星群的成员数量多、分布紧密,易于空间失效卫星或空间碎片发生碰撞,要求微纳星群具备碰撞威胁应急规避能力;在抗震救灾、森林火灾等应急救援任务中,星群构型要能够灵活切换以实现区域观测增强,要求遥感观测星群具备构型变换能力;此外,星群中单颗卫星可靠性比较低,星群存在局部卫星失效风险,要求遥感观测星群具备局部卫星失效条件下的构型重构能力。因此,分布式协同微纳遥感星群需要具备机动规避和构型变换能力,解决多约束构型变换协同运动规划以及协同运动控制等关键技术问题。
3)集群卫星智能健康管理技术
分布式协同微纳遥感星群卫星规模庞大,卫星上各分系统均为小型化设计,且集成度较高,星上故障概率大大增加。控制系统作为卫星重要的子系统,配置了复杂的敏感器、执行器和控制器,存在较高的故障风险。若集群内一个卫星控制系统发生故障,其轨道姿态发生漂移,极易引发集群内链式碰撞的毁灭风险,甚至形成大量低轨碎片,对空间环境造成极大影响。因此,亟须对集群卫星的控制系统进行智能健康管理,传统的基于传感器的故障诊断技术不能充分满足其可靠性要求,通过智能系统对故障的发生进行预测,对卫星的寿命进行估计,将判断节点迁移,为失效卫星预留寿命末期离轨的时间,避免集群系统内其他卫星受到失效卫星的干扰,最大限度地保证集群系统任务效能。集群卫星控制系统智能健康管理技术面向复杂的分布式协同遥感星群,可以极大地降低集群系统失效风险,提高系统在轨安全运行能力。
4)面向协同控制的智能组网技术
分布式协同微纳遥感星群协同控制系统在导航、规划、控制求解计算时涉及区域协同的复杂信息交互,求解速度和能力均受到星间组网路由的约束。星间自组织网络需要突破以业务数据为导向的现状,向面向协同智能导航控制任务需求的智能组网技术发展,为多星协同导航信息交互、分布式控制求解数据传输提供信息通路。然而,集群卫星网络固有的拓扑结构时变、单星资源受限、通信时延长、易受干扰等特性,给高效路由方法设计带来了挑战。传统天基/地基遥感网络需预先规划,不能快速响应随遇任务需求,难以应对故障、干扰等突发情况,端到端的时延、吞吐量等性能无法保障。面向分布式协同遥感星群协同导航、规划控制信息交互数据传输需求,设计自组织、智能化的集群卫星网络路由方法,满足传输路径的时间约束及自主构建需求。
2 分布协同自主导航技术
2.1 问题分析
智能分布协同对地观测系统实际由大规模星座和若干紧密星簇组成,其自主导航既涉及大规模星座的长期高精度自主导航,又涉及紧密星簇内多星间的自主相对导航。
在大规模星座的长期高精度自主导航方面,传统星座采用基于分时星间测距的自主导航方法,每颗卫星分配一定时间(典型如1.5 s)实现对相邻卫星的星间测距。在星座节点数量过多时,星间测距时间过长,测量延迟使得系统无法实现全局自主导航。同时,复杂动态星间通信拓扑也限制了星间测量的可用性。传统星座自主导航仍然采用集中式滤波求解方法,但是,计算量会随星座节点数量增加而爆发式增长,远远超出卫星计算能力。
在紧密星簇的星间自主相对导航方面,传统采用差分GNSS、光电跟瞄等实现两星间的相对导航,但对于成员数量较多的紧密星簇,差分GNSS、光电跟瞄等方法存在敏感器视场指向约束无法时刻满足、星间信息交互通道和范围受限等问题,无法满足任意时刻、任意两星之间的相对状态估计要求。
2.2 研究现状分析
2.2.1大规模星座的长期高精度自主导航
为了提高全球定位系统(Global Positioning System,GPS)在轨生存能力,早在20世纪80年代美国就开始导航星座自主运行研究,提出了利用星间测量进行星座自主导航的方法,自此星座自主导航技术受到国内外广泛重视。迄今为止,GPS星座中的Block ⅡR、Block ⅡR-M、Block ⅡF等批次卫星先后在轨开展了多种星座自主导航方法的测试[22-23]。在此基础上,下一代GPSIII、北斗等星座进一步规划了基于Ka或V星间链路的自主导航功能[24]。
在星座自主导航中,星间链路测距是其主要途径,国内外研究主要围绕提高长期导航精度、优化星间测量拓扑结构、提升数据处理效率进行理论和工程实践研究。其中,提高长期导航精度的方法主要有增设地锚站、引入星间指向信息、自主测量辅助;优化星间测量拓扑结构可根据优化目标选取进行区分,提升数据处理效率主要分为集中式、分布式研究思路。星座自主导航方法分类如图4所示。
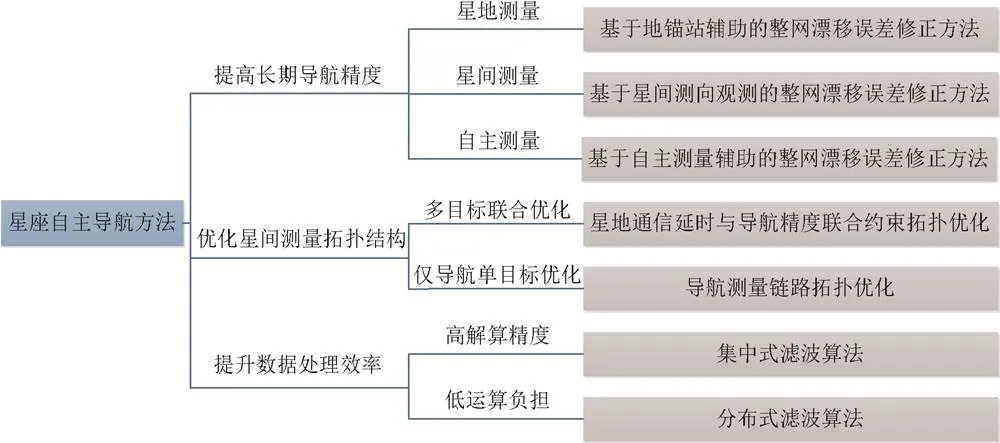
图4 星座自主导航方法研究概况
1)星座长期导航精度提升方法
由于地球引力场中作为主导的中心引力项与J2项均具有旋转对称性,仅利用星间测距数据无法确定星座内卫星的升交点经度,从而导致星座长期运行存在整体漂移误差。因此在提高长期导航精度方面,相关研究主要为了解决基于星间测距进行整网定轨存在的星座整体长期漂移不可观问题。
为了提高星座长期自主导航精度,现有研究主要采用引入先验信息或者绝对观测基准的思路来修正星座的漂移误差。由于引入轨道先验信息无法彻底消除星座漂移误差[25-26],更多研究关注于采用增加额外观测基准的方式来处理星座整体漂移的问题。根据选取的基准类型不同具体思路又可分为3类:第1类为在地表布设锚固站[27-28],星座内的卫星通过与锚固站的相对测量改正整体的漂移误差[29],该类方法具有稳定高精度的特点,但无法保证星座运行的完全自主;第2类思路中引入包含星间指向信息的星间观测[30-32],韩飞等[33]提出了基于星间照相观测的中轨星座自主导航系统方案,利用成员星间视线方向与视场内恒星方向的角距作为观测量,实现了星座整网无漂自主导航,该模式受到星座构型、星间可见性等限制;第3类思路利用空间各类目标作为导航基准,如采用天文信息、对地遥感测量、高度计测量等作为基准观测数据[34-35]。如李木子等[35]在星间测距基础上,增加雷达测高和地面图像标志点方位等测量量,有效解决了混合星座长期漂移估计问题。该类思路以其高自主性、安全可靠的特点已成为星座长期自主运行主要手段。其中,天文导航以其导航基准分布广泛、导航信息丰富以及高可靠性等特点,更是在修正星座整网漂移中受到了广泛的关注与研究[36]。
2)星间测量拓扑结构优化
在以星间相对测量为主要思路的星座自主导航框架中,快速、高效地完成整网自主导航测量与数据分发是星座导航解算的基础,几种星间链路网络拓扑对比如图5所示。
现有工程实践中,美国GPS与我国北斗导航星座均已完成基于星间测距的自主导航技术的在轨验证,其中早期GPS Block ⅡR以及Block ⅡF卫星采用UHF频段宽波束天线建立星间链路,轮询时分体制完成测距。在该体制下为协调各卫星任务,每个周期内测距子帧设定36 s为1帧,每颗卫星分配1.5 s[24],对于卫星数目较少的传统星座,这种方式对星座整体导航效率的影响并不明显,但是对于大规模星座,由于卫星数目巨大,星座的单帧测量周期将会大幅延长,无法满足星座内卫星导航解算的时效性需求。由此带来了针对大规模星座的星间测量拓扑结构设计及链路规划的新问题。
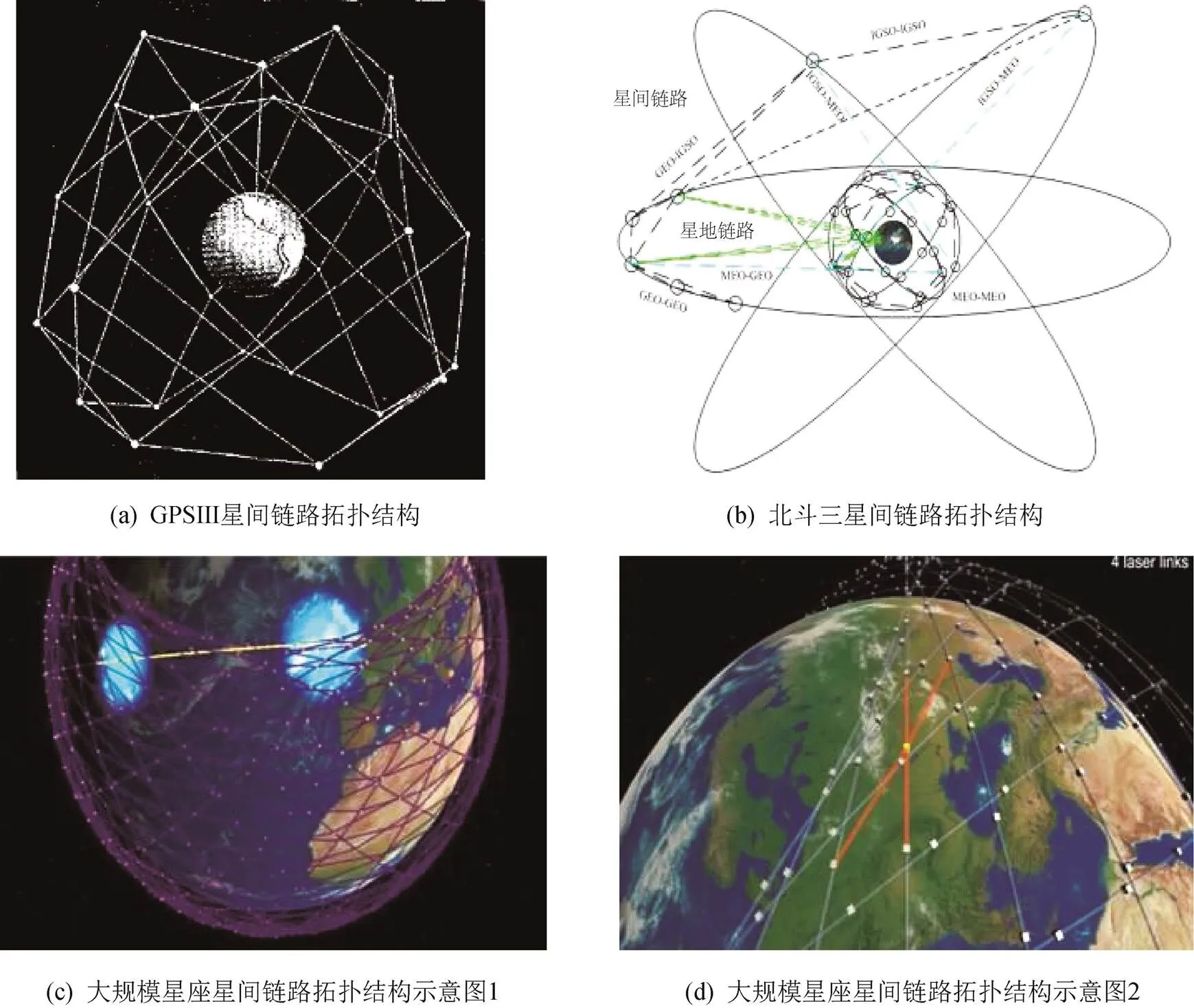
图5 星间链路网络拓扑对比
现有星间链路规划研究主要以链路星地传输数据延迟为主要优化指标,以导航星座为研究对象,通过对星间链路时分通信流程进行数学建模,利用离散差分进化(Discrete Differential Evolution,DDE)、模拟退火(Simulated Annealing,SA)算法以及数据驱动启发式基因算法(Data-Driven Heuristic Memetic Algorithm,DHMA)等智能优化方法,实现对星上数据传输到地面平均最短时延链路获取[37-40]。其中一些研究在进行延迟时间优化的同时,兼顾了对星间链路测距效果的评估与优化,YANG等[41]在DDE优化模型框架下通过在满足最优传输时延链路的基础上,根据各成员星可见星排序进行测距链路拓展,以最大测距建链数目为目标设计规划周期内的测距链路。同样是在最优平均延迟策略基础上,SUN等[39]在利用进化算法(Genetic Algorithm, GA)构建的满足最优通信数据链路基础上,以实现与已有链路不发生冲突为约束,以位置精度因子(Position Dilution of Precision, PDOP)值优化目标设计规划周期内的测距链路。王东会等[42]针对GPS轮询时分测距体制对定轨性能提高的限制,提出一种分组时分测距体制,设计 2步算法提升星间链路数目,提升星座定轨精度。鉴于大规模星座星间通信测量拓扑结构复杂特点,利用现有智能化优化理论成果,构建优化解算模型,实现快速高效星座测量拓扑设计及链路规划仍是亟待开展研究解决的问题。
3)导航数据处理方法
采用何种导航数据处理方法直接影响星座导航解算效率与导航精度。目前星座自主导航大致可分为集中式、分布式处理。集中式处理模式下,卫星系统将各成员星星间观测信息统一发送到主星进行数据处理及分发。该模式理论上解算精度最高,但其对设备通信和计算性能的要求也较高,因此很难应用于大规模星座的自主导航中。相比之下,分布式处理模式下各卫星仅使用直接测量关联的观测量进行处理,提升了任务的可拓展性、容错性。但由于其仅利用可见星的观测值进行参数估计,对整网测量解算关系进行了解耦与简化,从而造成次优估计。目前根据状态方程阶数不同,分布式导航算法可分为全阶处理(Fractional-Order Extended Kalman Filter,FOEKF)算法、降阶处理(Reduced Order Extended Kalman Filter,ROEKF)算法[29]。其中,FOEKF算法需要在每颗卫星上运行高阶滤波器,未有效地减少各卫星的计算负担。因此,现多采用ROEKF算法,根据分散处理方式的不同,ROEKF中又包含ICEKF(迭代级联EKF)、IREKF(提升观测方差的EKF)、SKF(分布式Schmit-Kalman滤波)等多种具体算法[42-45],依靠该类算法均可以有效地提升星载处理效率。
2.2.2紧密星簇的星间自主相对导航
基于差分GNSS的星间相对导航方法目前已经较为成熟[47-49],国内外均已在编队卫星任务中广泛应用,也被推广应用到微纳星群的内部成员间相对导航中[50],但该类方法需要依赖外部的GNSS系统,并非纯自主相对导航方法。
针对紧密星簇的星间自主相对导航,国内外研究主要围绕自主相对导航方法、相对状态实时感知估计进行理论及工程实践研究。其中,自主相对导航方法可分为测角+测距导航、仅测角导航。相对状态实时感知估计包括基于局部测量的全局相对感知、基于仅测距的相对导航以及基于场强的区域快速定位。星簇相对导航主要方法如图6所示。

图6 星簇相对导航方法研究概况
纯自主相对导航方法中,基于光电跟瞄、激光/微波雷达等敏感器测量相对方位和相对距离,进而实现相对位置和速度估计[51-53],也是相对成熟的方法。进一步,在功耗、重量约束下,激光、微波等主动探测设备量程受限,对于微小卫星,难以实现远程目标主动测距,基于红外/可见光相机被动成像的仅测角相对导航成为重要发展方向。WOFFINDEN等[54]和GELLER等[55]根据提出的可观性判据证明了仅测角相对导航的可观性。欧空局PRISMA计划在2011—2013年间开展了多次仅测角的相对导航技术在轨试验,充分验证了可行性[56-58]。但是,仅测角的导航系统中相对状态中径向的可观测度显著下降,估计精度差甚至发散。国内外学者先后提出了轨道机动[59-61]、相机偏置[62-64]、复杂动力学[65-69]和多视线协同[70-75]等改进方法。其中,多视线协同是最有效的解决方法,可以使系统状态完全可观,从而极大扩大微小卫星的精确相对导航有效距离范围。但是,这些方法需要敏感器视场覆盖目标,由于星簇卫星数量较多,且在相对动力学作用下相对位置连续时变,敏感器视场难以覆盖所有其他成员卫星,也就难以实现全部成员间实时相对导航。
紧密星簇的全员相对状态实时感知估计是近年来新兴起的研究热点,其核心在于解决传统方法的相对测量指向、通道约束问题。为此,国内外提出的主要解决途径包括3类:基于局部测量的全局相对感知、基于仅测距的相对导航、基于场强的区域快速定位。MATSUKA等[76-78]考虑星簇的时变通信和相对测量拓扑图,提出了去中心化相对位姿估计算法,成员星通过相邻星间测量确定相对位置并广播,结合星群基准系估计算法,实现统一全局基准下的星群相对状态估计。该方法中每颗成员星仅按照通信和测量拓扑实现相邻测量与导航,简化敏感器指向和通道约束,且计算量不随星群规模增长,但局部测量仍然需要构建相邻星间的敏感器指向关系,容易对星簇正常业务功能带来矛盾约束。龚柏春等[79-81]提出了一种基于一致性滤波的仅测距航天器集群的相对导航方法,该方法借助星间通信时标测距,可以由全向天线摆脱敏感器视场约束,且无需增加新敏感器,但无线通信测距多径效应、系统低可观度,都制约了该方法的精度与稳定性。韩飞等[82]提出了一种基于场强指纹的星群区域快速定位方法,在星群中4颗基准星构建一定区域范围内的统一时空基准和无线电信号场,进入该区域的成员星接收基准星发射的无线电信号并估计强度,通过场强指纹匹配,确定区域内位置,从而实现全局相对导航。该方法成员星仅被动接收无线电信号,同样不受敏感器指向和测量通道限制,但场强指纹库的数据规模随区域空间尺寸、细分网格尺寸而急剧增大,导致可用的距离范围受限。此外,类GPS方法[83]、基于超宽带(Ultra Wide Band,UWB)[84]的方法也被用来解决星群成员相对导航问题,但都存在多径干扰、可用距离范围受限等问题。
2.3 趋势分析与展望
大规模星座长期高精度自主导航、紧密星簇的全员相对状态实时感知,是新兴的2类自主导航问题。
现有的星座自主导航研究从长期导航精度维持、星座导航测量拓扑设计、导航数据处理等角度为现有规模星座提出了解决方案。但伴随着星座卫星小型化、星座规模化发展趋势,星座呈现成员卫星数量庞大、多轨道平面密集分布、单星解算能力受限等新的特点,为自主导航提出了新的挑战。因此,未来大规模星座自主导航朝着高度自主、分布式、智能化方向发展,并聚焦星座整网长期漂移误差修正、大规模节点复杂星间测量拓扑结构优化、降阶分布式导航滤波数据处理等具体问题展开研究。
紧密星簇由于成员较多,如何在不影响星簇协同任务的情况下,摆脱星间相对测量的指向和通道约束,实现全员相对状态的实时感知,是需要进一步研究解决的问题。
3 智能规划与协同控制技术
3.1 问题分析
分布式协同微纳遥感星群需要具备机动规避和构型变换能力,其核心问题是解决星群协同运动规划和星群协同运动控制两方面关键技术。
星群协同运动规划的本质是在分布式求解框架下,综合安全避撞、构型维持、拓扑连通等多约束条件,考虑单星燃料消耗、星群燃料均衡、构型变迁时间、观测构型稳定性等多目标函数,解决复杂摄动、测量与控制不确定、模型未知等因素的多目标、多约束、分布式、自适应问题。常见的方法包括基于数学规则的星群运动规划方法和智能星群运动规划方法。基于数学规则的星群协同运动规划方法是将单星运动规划算法拓展应用到星群运动规划中,该类方法需要遍历整个搜索空间,通常要求解目标函数梯度信息,且计算量随着星群数量增加而显著增大,容易产生搜索的“组合爆炸”。由于星群协同运动规划面临着非线性、多约束、拓扑构型变换等问题,而进化算法、群智能、SA等智能运动规划方法无需求解目标函数梯度信息,不要求目标函数和约束连续性和凸性,对数据不确定性具有更强的鲁棒性,可有效解决星群协同运动规划中面临的非线性、多约束、建模困难等复杂问题。
星群协同运动控制是在星群拓扑变换、环境动力学模型不确定、通信异常、突发干扰等条件下,实现星群运动规划轨迹的跟踪控制。常见的方法包括基于分布式结构的控制方法和基于机器学习的智能控制方法。在星群协同运动控制任务中,面临动力学摄动、质量变化、拓扑构型变化、环境动力学模型不确定、通信时延或丢失等问题,需要考虑神经网络控制和多智能体强化学习等智能协同控制算法,解决星群构型拓扑时变、模型不精确、个体质量特性显著变化、通信受限等难题。
3.2 研究现状分析
3.2.1星群智能协同运动规划技术
星群协同运动规划是计算一个以时间为参数的函数,对于定义域内的每一个时间都满足运动学约束、碰撞约束以及控制受限约束,其输入包括障碍物预测轨迹、卫星状态等信息,输出各子星与时间相关的位置函数。星群规划算法包括基于梯度的星群运动规划算法和智能星群运动规划算法(如图7所示),前者包括凸优化、基于最优规划、拟牛顿等规划算法,后者包括进化、群智能、SA等智能协同运动规划算法,具有简单、通用、便于并行处理等特点。

图7 星群协同运动规划技术分类
基于梯度的传统星群协同运动规划算法是将经典的凸优化方法、基于最优控制原理规划、拟牛顿法等算法应用在星群规划中,具有可靠性高、技术成熟的优点,通常需要求解目标函数梯度信息。但是,解决多目标优化、目标函数非凸不连续等复杂问题时有较大的局限性,且计算量会随着卫星数量的增加而明显增加。
基于凸优化的星群协同运动规划是考虑燃料消耗最少、执行机构受限、控制过程约束等条件,对数学模型进行线性化处理,运用凸优化理论求解星群运动规划轨迹[85]。该方法求解速度比较快,但存在不能收敛或由于线性化产生误差较大的问题。基于最优控制原理的星群协同运动规划以确定任务为背景,基于最优控制和组合学原理研究星群协同运动控制问题[86-87],适用于构型不变而卫星位置改变的特定场景。
与传统基于梯度的规划方法相比,智能星群运动规划方法无需求解目标函数梯度信息,不要求目标函数、约束连续性和凸性,对数据不确定性具有更强的适应性,是解决星群协同运动规划的有效方法。典型星群智能运动规划的优化算法包括进化算法、群智能算法、SA算法。
进化算法是基于自然界生物的遗传和变异等机理,对进化规律加以模式化而形成的优化算法,典型算法包括遗传算法、差分进化算法和免疫算法。基于遗传算法的星群运动规划方法是模拟自然进化过程,将星群协同运动规划问题转化为染色体基因的交叉、变异等进化过程,通过对适应度函数进行寻优,获得满足多约束条件的星群运动规划可行解,该方法具有全局搜索能力强、不依赖于梯度信息等优点,但局部搜索能力较弱,通常无法获得全局最优解。
差分进化算法是一种随机启发式搜索算法,基于实数编码、差分变异操作和竞争生存策略,有效降低了计算的复杂性,具有较强全局收敛能力和鲁棒性,适用于求解复杂运动规划问题。
免疫算法是将免疫概念和理论用于遗传算法,采用群体搜索策略,迭代计算获得问题最优解,抑制遗传算法存在的退化问题,具有自适应性强、随机性高、并行性强、全局收敛性好等优点。
群智能算法是一种模拟生物群体行为规律的优化方法,它受社会昆虫(如蚂蚁、蜜蜂)和群居动物(如鸟群、鱼群和兽群)的启发,无需集中控制和全局模型,可实现复杂分布式求解。
典型算法包括粒子群算法(Particle Swarm Optimization,PSO)、蚁群算法、蜂群算法、狼群算法等[88]。PSO[89]是受鸟群或鱼群觅食行为启发,将星群运动规划可行解当作一个粒子(族群个体),粒子在解空间中移动或游走以获得最优解,该算法的缺点是易陷入局部最优。蚁群算法是通过模仿蚂蚁觅食时可快速越过障碍物并找到蚁巢与食物之间的最短路径的行为,实现复杂问题求解[90],该算法具有分布式计算、间接通信、无中心控制、易与其他算法相结合等优点,但算法参数设置复杂,参数设置不当易偏离最优解。蜂群算法[91]模仿蜂群采蜜行为,依照任务分工完成蜜蜂之间的蜜源信息交流和共享,具有结构简单、搜索效率高的优点,但易陷入局部最优解[92]。狼群算法是模拟狼群捕食和猎物分配的自然启发式算法,通过狼群初始化、头狼竞争和召唤、猎物围攻和狼群更新等步骤获得最优解。
王训等[93]针对无人集群系统协同监视任务,考虑自身能量消耗目标函数,基于PSO规划出了局部路径,使群体系统涌现出聚集行为。张震等[94]针对障碍物规避的航天器集群动态目标点路径规划问题,提出了一种基于协同PSO的路径规划方法,得到三维空间中星群动态路径规划最优解。韩博文等[95]提出了一种多策略融合量子PSO,获得了动态最优轨迹解。王婷等[96]针对多星编队构型优化问题,将非线性模型求解问题转化为参数约束优化问题,采用粒子群优化算法实现了平面和立体情况下的最优静态编队构型优化。
SA算法是基于蒙特卡洛迭代求解策略,无需搜索空间知识或者辅助信息,在邻域结构内选取相邻解,采用概率变迁确定搜索方向,基于目标函数评估以获得最优解,该算法对初值不敏感,具有渐近收敛性和并行性,可获得全局最优解。周亮等[97]针对星群重构机动过程中的安全避撞任务需求,采用改进SA算法获得星群重构全局最优解。
3.2.2星群智能协同运动控制技术
星群协同运动控制[98]的典型控制策略包括基于分布式星群协同运动控制、领导者-追随者协同运动控制、基于虚拟结构的星群协同运动控制、基于行为的星群协同运动控制等(如图8所示),在满足星群一致性和星间安全避撞等方面具有一定优势,但在解决通信延迟和数据丢失、动力学模型不精确、强干扰、拓扑构型变换等复杂任务时,具有一定的局限性,而以神经网络和多智能体强化学习为代表的星群智能协同运动控制方法在解决上述问题中具有较好的控制性能。
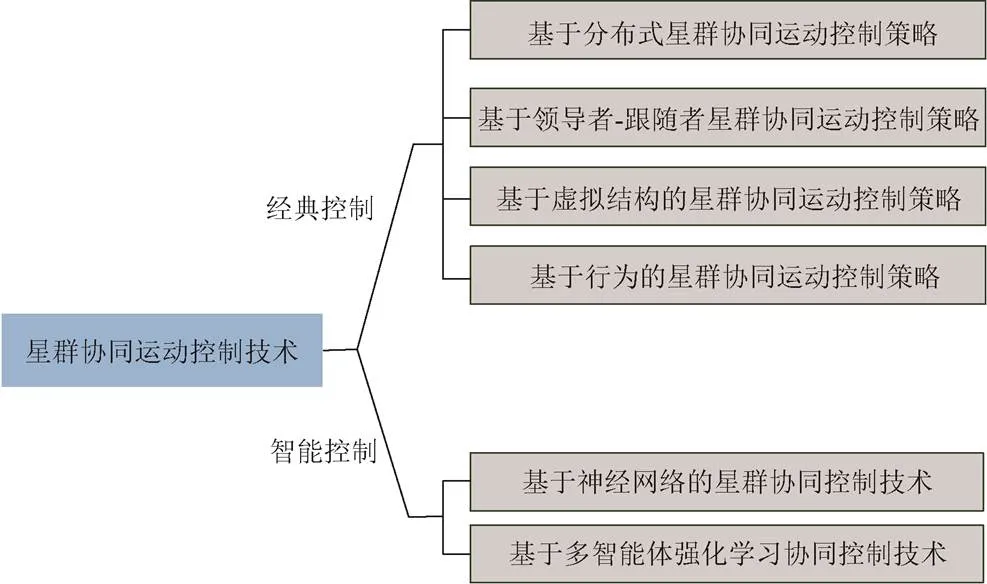
图8 星群协同运动控制技术分类
基于分布式星群协同运动控制策略是指每个子星的位姿和速度信息与星群中相邻成员进行交互,无需所有星群成员信息,直接与相邻成员进行通信以减少信息量,降低计算和通信限制[99-106]。基于领导者-跟随者的星群协同运动控制策略是指星群中由领导者和跟随者构成,领导者与跟随者保持相对稳定运动状态[107],采用鲁棒控制、自适应控制、变结构控制等算法[108],实现编队构型保持控制。基于虚拟结构的星群协同运动控制策略是基于星群期望状态,通过星群协同控制使系统状态总体误差控制到最小,该策略设计简单、鲁棒性较强,但对星群之间的通信以及星载计算能力要求都更高[109-110]。基于行为的星群协同运动控制策略是把星群行为分为构型保持、构型跟踪、构型重构、协同围捕等[111-112],并把各个行为模式根据权重不同体现在权函数中,利用遗传算法、势场法[113-115]等得到协同控制策略,该方法稳定性分析较难。
随着人工智能技术的发展,以神经网络控制算法和多智能体强化学习算法等为代表的机器学习方法被广泛应用于星群协同运动控制中。
神经网络控制算法用大量简单计算单元模拟人脑神经元的信息处理、存储和检索等功能,在通信延迟、数据丢失、动力学模型不精确、强干扰等复杂环境下,具有较好的控制性能。刘国平[116-117]针对具有通信延迟和数据丢失的网络多智能体控制系统的一致性和稳定性问题,分别提出了一种网络化多智能体预测控制方案和一种用于网络化多智能体系统(Networked Multi-Agent Systems,NMASs)的云预测控制方案,以实现输出一致性,并主动补偿通信延迟和数据丢失。岳晓奎等[118]研究了一类具有多源高动态不确定性的集群式无人系统的抗干扰编队控制问题,针对编队飞行动力学中存在的非线性时变特征所带来的不利影响,基于径向基函数神经网络改善集群系统的逼近和补偿性能,实现星群的自适应编队控制。
基于多智能体强化学习的星群协同控制方法,是指星群中每个卫星通过与环境进行交互获取奖励值,获得该环境下最优策略,在解决动态复杂环境下星群协同运动控制方面具有明显的优势。目前,多智能体深度强化学习是无人集群系统协同行为策略学习的主流方法。
独立多智能体强化学习方法是将单智能体强化学习方法直接拓展到多智能体强化学习任务中,每个智能体都把其他智能体看作环境的一部分,按照单智能体学习方式更新策略[120],该方法在小规模离散空间的学习效果较好,但由于忽略了智能体之间的相互决策影响,在大规模星群协同控制任务中很难获得可行解。文献[121-122]将各智能体的状态和动作集中在一起,构成扩张的状态和动作空间,采用多智能体强化学习方法训练所有的智能体,获得最优策略,但该算法随着卫星数量的增加,状态和动作空间会显著增大,导致无法搜索到可行解。
王毅然等[123]提出了基于多智能体强化学习的复杂任务路径规划方法,采用无模型在线Q学习算法,开展了复杂环境下的多智能体协同路径规划,避免了星间以及与障碍物的碰撞,获得满足终端约束的最短路径。赵毓等[124]针对多航天器自主规避多拦截器攻击任务需求,提出了基于MADDPG的多航天器自主智能决策自学习模型算法,以相对距离和总机动时间为变量设计评价函数,实现多航天器协同运动控制,提高了多航天器自主机动逃生成功率。文献[125]考虑了智能体之间的协同与对抗关系,提出了一种多智能体深度确定性策略梯度方法,基于博弈对抗思想,采用“中心化训练-去中心化执行”的学习结构,估计所有智能体的策略,实现多智能体协同运动控制。
3.3 趋势分析与展望
星群智能协同运动规划与控制技术已经成为新一代人工智能的核心研究领域,随着大规模商业卫星星座、星群的投入运行,星群协同运动规划与控制技术不断向智能化方向推进,主要存在2个方面的发展趋势:
1)星群协同运动规划由基于梯度的传统星群协同规划算法向智能星群协同运动规划算法发展,与传统梯度运动规划方法相比,星群智能运动规划方法有效解决了复杂运动规划问题,但不同的智能规划算法各具特点,且使用场景不同。因此,基于单一的智能优化算法解决星群协同规划问题时,可能会面临算法搜索精度低、收敛速度慢等问题。针对星群协同规划任务对约束条件和目标函数的不同要求,基于不同智能优化算法的优点,探索混合星群智能协同规划方法,能够有效提升算法的搜索精度、收敛速度,避免陷入局部最优解。
2)星群协同控制由传统分布式控制向多智能体强化学习控制方向发展,在星群数量有限条件下,可有效提升星群在通信延迟、数据丢失、动力学模型不精确和强干扰等条件下的控制性能。但是,目前多智能体强化学习算法在智能体数量显著增多时,评价网络的输入维度会呈线性增加,导致神经网络更难训练和收敛,需要改进多智能体强化学习算法,解决大规模星群协同控制问题。
4 集群卫星智能健康管理技术
4.1 问题分析
分布式协同微纳遥感星群卫星数量众多,针对集群卫星控制系统的智能健康管理技术既需要考虑单星控制系统的健康管理,也需要考虑卫星集群效能开展评估。
针对单星健康管理的基本需求是感知、决策和执行。常用的方法可以分为基于模型驱动的健康管理技术、基于数据驱动的健康管理技术。基于模型驱动的健康管理技术是以模型为核心,并由模型映射驱动健康管理的过程。在卫星应用上,多为部件级别的健康管理,尚无控制系统健康管理模型描述。基于数据驱动的健康管理技术是一种较为新型的问题求解方法,从初始的数据或观测值出发,运用启发式规则,寻找和建立相应内部变量特征之间的映射关系,实现利用数据对卫星系统健康状态的判断和估计。控制系统作为卫星的子系统之一,在卫星在轨运行的过程中承担着十分重要的角色,随着任务的复杂性,星上需要配备多种敏感器、执行器和控制器,这些单机设备有很强的独立随机特性,之间又存在强烈的耦合关系,因而控制系统的精确模型很难完全建立。这也使得基于模型驱动的健康管理技术难以在卫星控制系统健康管理中广泛应用,基于数据驱动的健康管理技术才是未来卫星及星群控制系统健康管理的主要解决途径。
针对星群健康管理的研究目前较少且未形成体系。总体而言,基于理论计算研究的思路与单星健康管理基本一致,此外,也有一些学者基于仿真试验开展星群智能健康管理研究,其中基于数字孪生的试验方法充分利用物理模型、传感器更新、运行历史等数据,可以搭建较为精准的试验模型。
4.2 研究现状分析
4.2.1健康管理技术工程应用现状
针对卫星制导、导航与控制(Guidance-Navigation-Control,GNC)分系统的故障预测与健康管理技术近年来被推广应用到航天器安全运行管理中,发挥越来越重要的作用[128]。
美国作为航天大国,在健康管理领域起步较早,已开发了许多针对航天器整器及其各个分系统的健康管理工具,以对卫星在轨安全数据进行管理[131]。早期,美国NASA健康管理主要通过归纳式监测系统(Inductive Monitoring System,IMS)[132-134]实现,自2007年起,基于IMS的系统就开始用于控制力矩陀螺的监测,后经不断拓展,已可以用于航天器控制分系统,该系统可靠性较高,具有较好的通用性,且不需要过多的计算机资源,已在“国际空间站”等[135]多个航天器上进行了初步应用。但该系统仅用于监测,且虚警率较高,监测数据仍需地面进行分析和决策。2010年,NASA开发了下一代卫星运行管理系统(Integrated Vehicle Health Management,IVHM)[136-137]。该系统已经具备一定程度的自主能力,能够为包括控制系统在内的多个分系统的实时健康管理提供数据监测和一定的分析诊断,包括实时故障检测、故障判断、决策和结果评估,数据及结果都要下传地面,视故障情况决定是否由地面进行分析。
欧洲一些国家在卫星自主健康管理领域也取得了一定的成就。瑞典空间物理研究所的 WINTOFT等[138]设计了一个航天器异常分析和预测系统(Spacecraft Anomaly Analysis and Prediction System,SAAPS),该系统主要用于识别环境异常及环境异常引发的航天器异常,通过统计模型和神经网路模型组成分析模块,可以识别及预测异常状态,对故障预测的准确率可以达到70%。欧空局在2011年为在轨运行12年的XMM-Newton科学探测卫星开发了一套基于经验模型的健康管理系统[139]。主要针对星上4个反作用轮的摩擦扭矩遥测,可以解算轴承失稳发生的频率、持续时间以及对摩擦力矩的影响,并通过更新姿态控制策略最大限度地降低轴承噪声增加对卫星控制系统造成的影响,进一步延长该卫星的在轨寿命。
相比而言,我国尽管也在开展星上自主健康管理系统的建设,但目前控制系统健康管理系统的自主性较差,仅能保证部分单机产品的数据测量和分析,如控制力矩陀螺和动量轮。高分三号卫星[130]在设计时就对健康管理考虑较为充分,可以实现在非地面干预情况下,自主对健康状态进行实时测量与数据分析管理。实践十号卫星[141]作为一个短期在轨飞行的低轨航天器,在轨飞行期间对飞轮等关键零部件进行了自主健康状态监控。
卫星GNC分系统的健康管理十分复杂,且必须要与实际工程应用紧密结合。美国在该领域较为领先,已经具有在多个型号领域应用的理论方法和管理体系。国内也有几个型号开始健康管理的探索,单应用方向还较为单一,且自主级别较低,与国外先进理论仍存在较大差距。
4.2.2基于人工智能方法的单星健康管理技术
卫星智能健康管理需要星上自主进行测量、分析判断、决策和执行。由于卫星系统及其相关组件的复杂性,在轨卫星系统的数据量不断增大,是一种典型的大数据系统,可以通过借助统计推力及数据学习等人工智能的手段,根据经验数据及测量数据,对系统进行健康状态管理[142]。目前系统健康管理常用的方法可以分为基于模型驱动的健康管理技术和基于数据驱动的健康管理技术,其中数据驱动的方法包含3种类型:基于知识驱动、基于统计推力以及基于数据学习。将健康管理技术中常用的方法总结如图9所示。

图9 健康管理技术常用的算法划分
基于模型驱动的健康管理技术[143-146]是以模型为核心并由模型映射驱动健康管理的过程。在健康管理活动中通过创建各种模型精确表达不同的问题域,并利用模型转换来驱动包括故障识别、故障诊断分析以及故障剥离等在内的整个健康管理过程。在卫星应用上,多为部件的故障诊断、故障预警以及部件使用寿命预测,没有控制系统健康管理的案例。文献[143-144]均以动量轮为研究对象,文献[143]从失效物理分析角度切入,建立基于随机阈值的Gauss-Brown失效物理模型来解释动量轮的失效原因,从而对动量轮开展可靠性评估,所得结果能够符合实际工程应用;文献[144]则利用大量实验,测试动量轮在不同温度、不同环境的实际运行数据作为建模基础,经过10年的数据累积,最终建立了动量轮的退化模型,以实现在轨故障预判。文献[145]以无人机制导系统作为研究对象,将执行器或推进系统的故障模型嵌入健康管理模型,可以实现部分故障情况下的功能恢复以及其他故障条件下的安全返航。控制系统作为卫星的子系统之一,在卫星在轨运行的过程中承担着十分重要的角色,随着任务的复杂性,星上需要配备多种敏感器、执行器和控制器,这些单机设备有很强的独立随机特性,之间又存在强烈的耦合关系,因此,控制系统的精确模型很难完全建立。这也使得基于模型驱动的健康管理技术难以在卫星控制系统健康管理中广泛应用[147],基于数据驱动的健康管理技术才是卫星及星群系统健康管理的主要解决途径。
基于数据驱动的健康管理技术是一种较为新型的问题求解方法,从初始的数据或观测值出发,运用启发式规则,寻找和建立相应内部变量特征之间的映射关系,实现利用数据对卫星系统健康状态的判断和估计。目前常用的数据驱动方法可以分为3类:基于知识驱动的方法[148-149]、基于统计推理的方法[150-152]以及基于数据学习的方法[153-159]。
基于知识驱动的健康管理的设计主旨是将知识与健康管理系统设计相结合。其基本思路是:通过总结健康管理领域的实践经验和故障数据,将人的思维方式总结提炼成计算机能够理解的知识库,在知识库的指导下,设计故障识别、故障预警、寿命预测等健康管理方法,由于得到了领域知识库的支持,所得方法可以更加符合工程实际应用。目前国内外对于知识驱动设计已有大量研究,主要包括基于本体的推理方法、基于规则的方法和基于模型的方法。文献[148]针对飞机的控制系统设计了一种健康管理模型,通过机器学习提高控制系统参数的泛化能力,有效减少训练模型的数据量以适应机载计算机。文献[149]提出了一种闭环卫星控制系统中执行机构微小故障检测与隔离的组合方法,利用基于模型的方法对可能的干扰进行解耦和故障隔离,然后用人工智能方法进一步减少剩余模型不确定性的影响。具体来说,就是基于观测器的人工神经网络建模方法的扩展,以提高诊断系统的性能,通过考虑决策逻辑,可以成功地检测驱动器的小故障。
基于统计推理的健康管理的设计主旨是通过对数据样本推理,由部分到全部推理出总体的共性属性,在分层抽样的基础上进行的,数据样本有一定的选择性,结论可靠性较高。统计推理的设计方法主要包括Kalman滤波方法、隐马尔科夫方法、贝叶斯网络方法、主成分分析方法等。文献[150]以卫星姿态传感器故障作为研究对象,将卫星姿态与传感器之间固有冗余关系作为判断依据,借助测量空间的特征值,基于主成分分析方法将该冗余关系进行量化,再通过监测特征值的变化实施判定,最终确定卫星姿态传感器的故障类型和故障位置。
以深度学习为代表的数据驱动方法近年来在卫星健康管理领域有较高的关注度,该方法的设计主旨是利用大量的数据训练星上系统自主学习样本数据的内在规律和表示层次,在学习过程中获得的信息最终对故障特征进行解释,提升故障识别的准确率。文献[153]将深度学习应用于卫星姿态控制系统的故障检测与故障隔离。文献[154]使用非线性动态逆控制作为底层控制算法,通过深度学习训练系统适应火箭不同燃烧阶段的模式,搭建火箭发射过程的针对执行器故障的容错控制系统。基于深度学习的卫星控制系统健康管理技术近年来受到众多学者的广泛关注,有深入挖掘的可能性,但距离工程应用还有一定的差距,若要转化应用,还需解决以下问题:1)基于深度学习的方法对样本数据的需求量巨大,星上单机产品可以通过地面测试等方式积攒样本数据,但若要应用于分系统层级,其样本数据的获取还存在一些问题;2)基于深度学习的健康管理方法数据量较大,对计算资源的要求很高,星载计算机的运算能力也是需要考虑的重要问题。
4.2.3星群健康管理技术
目前针对星群健康管理[160]的研究较少,没有形成系统的层次体系架构。若按研究形式不同加以划分,有2种发展方向:基于理论计算的健康管理技术、基于仿真实验的健康管理技术。
针对星群健康管理的理论计算方法与单星相类似,分为模型驱动、数据驱动。由于星群的系统模型更加复杂,很难直接得到解析模型,目前也没有学者在这方面开展研究。但在武器系统效能评价体系中,常用美国工业界武器系统效能咨询委员会模型(Availability-Dependability-Capability,ADC)进行系统效能评估,可以借鉴在星群健康管理中。ADC通过理想化假设建立体系模型进行系统效能评估的方法,其定义为“系统效能是指系统能够满足(或完成)一组特定任务要求的量度”对对象、任务、条件、时间以及能力5个方面规定了系统效能评价标准。杨卓鹏等[161-162]将ADC的系统效能概念应用于导航星座中,集成应用Petri网、中断分析、贝叶斯网对ADC方法进行了一定的改进,在设计阶段为导航星座的星座覆盖效能、保障运行方案的优化提供量化依据。文献[163-164]均对ADC模型进行了一定程度的改进,使其更贴合相应的武器装备系统特征。基于数据驱动进行星群健康管理的方法是一个可行的思路,但训练模型需要的样本数据量过于庞大,而且模型的可理解性较差,目前只能停留在理论阶段,无法进行工程应用。陈辛[165]利用神经网络算法对一主二从结构的微小卫星星群中从星的姿态控制系统故障诊断提出了一种故障诊断方案。该方法对星群结构、故障条件的设定都较为苛刻,适应性不高,但期间考虑了星间相对姿态信息,星间故障迁移影响等方向,是单体智能健康管理向多体智能健康管理的一次积极尝试。
由于星群健康管理技术很难在真实环境下进行测试,基于仿真实验的研究方式可以理解为星群健康管理技术的验证手段。仿真模型搭建越精准,系统智能化和数字化程度越高,其试验结果越具有真实性。近两年,有学者基于数字孪生的思想开展星群健康管理的研究,2012年NASA给出了数字孪生的概念描述。
数字孪生是指充分利用物理模型、传感器、运行历史等数据,集成多学科、多尺度的仿真过程,它作为虚拟空间中对实体产品的镜像,反映了相对应物理实体产品的全生命周期过程。NASA对空间飞行器建立数字孪生试验,可以进行数据分析、故障检测和预测,开展了飞行器健康管控应用。我国也有航天恒星科技有限公司[166]基于数字孪生建造了低轨巨型星座的智能健康管理系统,实现卫星的全生命周期管控。
然而不论哪种研究形式,现有的针对星群健康管理技术的研究还是基于多个单智能体自主健康管理的堆叠,没有真正挖掘星群健康管理中群体任务的需求和特点。星群健康管理在单星健康管理需求(感知、决策、执行)的基础上还需具备沟通、合作的群体任务需求。具体来说,分布式协同遥感星群控制系统的健康管理技术存在3个发展方向:1)不同于一般的主-从式编队任务,其间协同模式多样化,拓扑结构复杂,对星群健康管理的动态拓扑分析是一个研究难点;2)作为星群系统,可以利用星上携带敏感器对星群内其他卫星的姿态、轨道状态进行测量,测量数据可以便利地进行信息交互,群体交互数据感知技术是星群故障诊断的一大优势;3)该星群中没有主星的存在,在任务决策时需要由单星健康管理的单体决策向多体结构的群体决策转变。
4.3 趋势分析与展望
随着卫星/星座复杂多变的需求和特点,星上需要配备多种敏感器、执行器和控制器。卫星控制系统健康管理技术已经成为航天领域的重要发展方向。伴随着人工智能技术的快速发展,星上健康管理技术也在向基于人工智能的数据驱动智能管理方向发展。随着大规模商业卫星星座、星群的投入运行,卫星健康管理势必由单星的健康管理系统向星群星座的健康管理系统进行转变,星群健康管理技术主要存在以下2个发展方向:
1)单星健康管理将从检查/监视单一功能转向检测、诊断、预警综合健康管理系统;从针对单机产品向针对系统方向发展;从针对单一系统架构向开放系统架构、通用化方向发展。总体而言,健康管理技术将更加智能化、综合化、实时化和通用化。
2)星群智能健康管理系统建立,分布式协同观测星群在单星的单机、系统、整星3个层级之上还需引入星簇及星座2个层级,形成集群网络多层级的健康管理状态评估模型。进行集群健康管理时,存在星群动态拓扑分析、星间数据交互式智能健康诊断、群体决策在星群健康管理的应用3个发展方向。
5 集群卫星智能自组织路由技术
5.1 问题分析
星间路由是实现集群卫星网络中多星协同控制的关键,为多星协同导航信息交互、分布式控制求解数据传输提供支撑[167]。传统天基/地基对地观测网络的路由需预先规划[168],由地面控制站计算并上传至卫星节点执行,不能快速响应随遇任务需求,无法应对因设备故障或链路切换等导致的过时路由问题。面向未来大规模星群智能协同导航、控制数据传输需求,星间路由技术需朝着自组织、智能化方向演进。本章就星间路由的2个主要发展方向开展分析,对卫星网络的自组织路由技术和智能路由技术的发展现状进行了介绍。
卫星网络自组织路由将摒弃传统的地面预先规划模式,由卫星节点自主完成路由计算和业务编排。传统基于静态图的路由算法将卫星网络看作分时段静态网络,并在各时段内构建端到端传输通路。由于忽略了时变多维资源间的关联关系,端到端的时延、吞吐量等性能受限。现有基于时变图的路由方法以低时延/高吞吐量目标,能够在特定场景和资源约束下为业务按需构建路由路径,但庞大的图模型存储量和复杂的路径搜索过程导致算法的可扩展性难保障。
星载智能路由将在自组织路由规划的基础上引入边缘计算、机器学习等技术,通过学习历史状态(如高时延和高数据包丢失率等)中的经验信息,进一步优化路由结果。然而,卫星网络固有的拓扑动态性、资源时变性和链路不稳定性等特性对智能组网架构设计与智能路由计算提出了巨大挑战。现有的智能路由方法本质都是优化卫星流量路径选择或拥塞控制,仿真实验未充分考率卫星网络时变特性,缺乏在逼真环境中的训练、部署与测试。
5.2 研究现状分析
5.2.1卫星网络自组织路由技术
一直以来,图论都是建模和求解的路由问题的有力工具。现阶段集群卫星网络的自组织路由技术仍处于探索阶段,面向低时延和高吞吐量两项目标,许多基于图的卫星网络路由算法被相继提出,如图10所示。离散时间动态虚拟拓扑路由(Discrete-Time Dynamic Virtual Topology Routing, DT-DVTR)[169]、有限状态自动化路由(Finite State Automaton Routing, FSAR)[170]和动态检测路由算法(Dynamic Detection Routing Algorithm, DDRA)[171]均基于静态图设计,由于忽略了时变多维资源间的关联关系,制约了端到端的时延、吞吐量等特性,网络资源利用率难提升[172]。

图10 卫星网络路由算法划分
时变图相较于静态图,通过引入时间属性,能够精准刻画网络拓扑、带宽、存储等多维资源的动态特性[172],助力高效的集群卫星路由方法设计。
1)在低时延传输路径方面,文献[173]利用快照图(Snapshot Graph,SG)建模卫星网络,提出了最小化路径费用(如:时延)的动态路由算法。该方法依据卫星运行轨迹,以发生链路切换的时刻为分割,构建表征不同时段内网络拓扑和资源的多个快照,并在各快照中计算端到端的最优路径。然而,由于割裂了不同时段网络间的关联关系,导致可行路径路径搜索空间被压缩,制约最优路径的求取。为提升SG路由的性能,文献[174]增加了快照的连通性,通过重新分配星间链路,优化时延性能,提升网络链路资源的利用率。文献[175]提出了接触图路由(Contact Graph Routing, CGR)来实现时变卫星网络中的动态路由。CGR是一种基于中继的路由策略,它首先依据节点间周期性的接触计划构建接触图,而后以链路可用容量为约束选择端到端最早连通路径,但由于未考虑卫星节点的存储资源限制,导致网络易产生拥塞,业务时延保障性能降低。文献[176]采用事件驱动图(Event-driven Graph,EG)表征卫星网络时变拓扑和星载存储资源,并以时延保障为前提、传输能耗最少为目标设计高效的路由方法。
2)在最大化传输容量方面,文献[177]充分考虑到星上能量资源受限对数据传输能力的制约,构建能量时间扩展图(Energy Time-Expanded Graph,ETEG),支持能量、存储与链路带宽资源的联合调度,实现能量的最优化利用和端到端遥感数据的最大化传输。文献[178]针对卫星携带收发信机资源受限的场景,建立了收、发容量约束的时间扩展图(Time Expanded Graph, TEG)表征,并设计了最大流路由算法实现收发信机资源的优化分配,最大化端到端吞吐量。然而,TEG的存储规模会随着网络大小及规划时间区间的增加而急剧提升,导致相关路由算法的求解复杂度高。为克服上述瓶颈,文献[179]基于存储时间聚合图(Storage Time Aggregated Graph, STAG)联合表征卫星网络时变多维资源和空间业务差异化传输需求,并将复杂的服务质量(Quality of Service,QoS)路由问题约减为一个基于图的最大流问题,能够以低的计算复杂度同时为多个业务构建满足资源需求和时延约束的端到端路径。
上述基于时变图的路由算法能够支持在时变、资源受限的集群卫星网络中为任务按需构建时延或容量最优的路由,且能够分布式应用于各卫星节点,支持集群卫星网络的在轨自组织组网。然而,由于路由计算仅依赖于当前(链路状态信息获取)及未来(基于卫星运动轨迹预测)的网络拓扑和资源信息,忽略了历史状态(如高时延和高数据包丢失率等)中的经验信息,制约了路由结果的进一步优化。
5.2.2星载智能路由技术
星载智能路由技术是为了解决传统的路由策略无法状态中学习和改进的问题,是增强集群卫星网络组网性能的有效途径[180]。
1)在组网架构方面,诸多学者软件定义网络(Software Defined Network,SDN)在时变卫星网络中应用的可能,致力于提升卫星网络的集中自治能力,为差异化的空间应用提供定制化的网络服务[181]。现有SDN技术大多采用OpenFlow协议作为南向编程接口[182]。然而,随着协议版本的迭代,庞大的“多级流表”和复杂的流表项目查找与匹配问题会对星上的交换、存储和处理能力带来巨大挑战[183]。基于此,文献[190]提出了一种基于神经网络的SDN卫星网络智能路由(Information Resource Sharing Service Network,IRSSN)方案。该方案中网络控制器将通过训练神经网络(Neural Network,NN)获取数据流的传输模式,并将流表替换为训练的NN,达到节省三态内容可寻址内存(Tri-state Content-Addressable Memory,TCAM)空间和提升路由与转发效能的目的。
2)在路由计算方面,当前星载智能路由的发展刚刚起步,其基本思想是在路由规划中引入边缘计算、机器学习等技术与新兴服务模式,优化传输路径时延,避免流量拥塞。文献[184]提出了一种基于正交多项式(切比雪夫)神经网络的路由方法,根据业务流的流量类型预测传输路径,满足空间应用的QoS需求。文献[185]尝试在延迟容忍网络(Delay Tolerant Network, DTN)中引入Q路由和朴素贝叶斯分类等人工智能方法,优化路由性能。文献[186]提出了一种基于深度卷积神经网络的流智能控制方法,通过预测卫星网络的流量分布特性,分析链路拥塞趋势,通过自适应路由表更新,实现高效的拥塞控制。文献[187]提出了一种基于不完全信息博弈机制和强化学习的有限贪婪快速拥塞控制方法。文献[188]则设计了基于强化学习和贝叶斯学习辅助的CGR算法,优化DTN路由性能。文献[180]探讨了基于深度强化学习的星上路由机制的训练与部署方案,利用强化学习模型对精准预测网络拓扑,并根据网络的历史流量矩阵对当前流量路由进行选择,提高路由转发的准确率和效率。
5.3 趋势分析与展望
星间路由是实现集群卫星网络高效星间协同的关键使能技术之一。现有自组织和智能路由方法虽能够在特定场景和约束下为业务按需构低时延/高容量的传输路径,支持在轨自主组网,但面向协同观测任务的导航、控制需求,集群卫星网络将朝着大规模、分布式、自主化的方向发展,对组网路由提出更高要求。
1)时间确定性路由
抢险救灾等突发事件的快速响应要求数据传输具备确定性时延保障,而现有的星上路由与转发技术仅提供“尽力而为”的传输服务,无法确保端到端的低时延、有界抖动和超低丢包。因此,未来需进一步研究时间确定集群卫星网络路由技术,为时间敏感空间任务提供保障。
2)遥感通信一体化路由
随着遥测业务需求的不断提高,卫星对地观测数据量与日俱增。为了实现海量遥感数据的快速回传,有必要探索观测与传输全流程的联合优化方法,支持协同观测卫星的优化安排和数据传输路由的按需规划。
3)分布式智能路由
现有的智能路由方法本质上都是优化卫星流量路径选择或拥塞控制,仿真实验未充分考率卫星网络时变特性,缺乏在逼真环境中的训练、部署与测试。如何在分布式、大规模、高动态集群卫星网络中设计和验证智能路由架构与算法仍是待解问题。
6 结束语
分布式协同微纳遥感星群对于提高观测效能、降低观测成本、提高数据品质、建立多源观测能力,具有很强的现实意义。通过总结国内外典型遥感卫星星群发展现状,得出以下结论:现有的微纳遥感星座通过高频重访大幅提升了对地观测的时间分辨率,但是由于单颗微纳卫星观测能力受限,难以满足多源同步与融合、高品质、大幅宽等数据应用需求。兼顾高时效、高效能的微小卫星是未来遥感领域应用的发展方向。
利用星座+星簇的布局形成的分布式协同微纳遥感星群具有多视角冗余观测、多源同时空遥感、快速重访等优势,是兼顾上述遥感应用需求的有效途径。但分布式协同微纳遥感星群卫星成员数量众多、空间分布复杂时变、协同任务复杂多样、相对运动关系复杂,由此带来长期自主安全运行、面向任务自主重构控制、面向复杂系统的高可靠性、协同信息网络交互四方面能力需求,对分布式协同遥感星群控制系统提出协同自主导航、智能规划控制、智能健康管理、智能组网四方面关键技术挑战。通过对4条关键技术的研究情况进行分析、归纳和整理,可以得出以下结论。
1)当前星座星簇自主导航研究主要针对数颗至数十颗卫星构成的小型卫星系统,围绕提高星座长期导航精度、提升导航数据处理效率以及增强星簇内相对状态估计能力等方面展开。在星座+星簇新型构型下,未来自主导航将朝着高度自主、分布式、智能化方向发展,星座整网长期漂移误差修正、大规模节点复杂星间测量拓扑结构优化、降阶分布式导航滤波数据处理等具体问题,是需要未来持续关注解决的问题。
2)星群协同运动规划与控制技术不断向智能化方向推进,主要呈现2个发展趋势:① 针对星群协同规划任务对约束条件和目标函数的不同要求,基于不同智能优化算法的优点,探索混合星群智能协同规划方法,有效提升算法的搜索精度、收敛速度,避免陷入局部最优解;② 星群协同控制由传统分布式控制向多智能体强化学习控制方向发展,在星群数量有限条件下,可有效提升星群在通信延迟、数据丢失、动力学模型不精确和强干扰等条件下的控制性能,但仍需要进一步改进多智能体强化学习算法,使其适应大规模星群协同控制问题。
3)随着大规模商业卫星星座、星群的投入运行,卫星健康管理势必由单星的健康管理系统向星群星座的健康管理系统进行转变。目前单星的卫星健康管理技术还需向更加智能化、综合化、通用化的方向发展,故障判断的时间点也不断前移,通过提前预判卫星健康状况,可以极大地降低卫星在轨的安全风险和故障影响。星群智能健康管理系统在单星的单机、系统、整星3个层级之上还需引入星簇及星座2个层级,将星群整体效能作为健康管理评估目标,形成集群网络多层级的健康管理状态评估模型。进行集群健康管理时,存在星群动态拓扑分析、星间数据交互式智能健康诊断、群体决策在星群健康管理的应用等需要解决的具体问题。
4)智能自组织路由是为多星协同导航信息交互、分布式控制求解数据传输提供网络化传输服务的关键。集群卫星网络固有的拓扑结构时变、单星资源受限、通信时延长、易受干扰等特性给高效路由方法设计带来了挑战。面向协同观测任务的导航、控制需求,集群卫星网络将朝着大规模、分布式、自主化的方向发展。未来的主要发展趋势包括:需进一步研究时间确定集群卫星网络路由技术,为时间敏感空间任务提供保障;为实现海量遥感数据的快速回传,需要探索观测与传输全流程的联合优化方法,支持协同观测卫星的优化安排和数据传输路由的按需规划;在分布式、大规模、高动态集群卫星网络中设计和验证智能路由架构与算法。
基于微小卫星的分布式协同观测系统已成为全球热点领域,不论国内还是国外都在进行技术研究和空间部署,比较来说,目前我国的技术和部署较为缓慢。本文综述了国内外在分布式协同观测领域的研究现状,旨在为同行提供借鉴,推进我国微小卫星协同观测系统的发展。
[1] 张志清,陆风,方翔,等.FY-4卫星应用和发展[J].上海航天(中英文),2017,34(4):8-19.
[2] 潘德炉,何贤强,李淑菁,等.我国第一颗海洋卫星HY-1A的应用潜力研究[J].海洋学报,2004,26(2):37-44.
[3] 王殿中,何红艳.“高分四号”卫星观测能力与应用前景分析[J].航天返回与遥感,2017,38(1):98-106.
[4] LIU G, ZHANG S. A survey on formation control of small satellites[J]. Proceedings of the IEEE, 2018, 106(3): 440-457.
[5] 李悦,张可,丁磊.美国军用卫星系统最新发展分析[J].航天电子对抗,2019,35(6):51-59.
[6] 陆晴,万向成,孙永岩.美国PlanetLabs公司和”鸽群”卫星的启示[C]//2017年集团科技委航天器总体大会.深圳:航天科技集团,2017:1-9.
[7] 周宇,王鹏,傅丹膺.SkySat卫星的系统创新设计及启示[J].航天器工程,2015,24(5):91-98.
[8] 刘韬.美国”天空卫星”技术探析[J].国际太空,2015(12):66-69.
[9] FARQUHARSON G, WOODS W, STRINGHAM C, et al. The capella synthetic aperture radar constellation[C]// 12th European Conference on Synthetic Aperture Radar. Washington D.C., USA: IEEE Press, 2018: 1873-1876.
[10] 罗格,卫征.航天遥感与中国空间信息产业发展[J].航天返回与遥感,2018,39(4):10-17.
[11] 李建全,王倩莹,张思晛,等.国外对地观测微纳卫星发展趋势分析[J].航天器工程,2020,29(4):126-130.
[12] 林来兴,张小琳.纳型卫星编队飞行技术现状及发展趋势[J].航天器工程,2017,25(5):65-73.
[13] 本刊编辑部.芬兰Iceye小卫星观测:将天气雷达网送入地球轨道[J].气象科技进展,2016,6(1):103.
[14] 周英杰,李思佳,魏红艳,等.“高分一号02、03、04星”卫星数据在矿山开发环境遥感监测中的初步应用评价[J].测绘与空间地理信息,2020,43(3):73-75,78.
[15] 解延浩,马驰,钟兴,等.基于”吉林一号”视频卫星的天基空间目标观测研究[J].空间碎片研究,2019,19(4):13-20.
[16] 李黎.高景一号卫星系统设计创新和在轨性能[J].国际太空,2018(9):28-32.
[17] 李先怡,范海生,潘申林.珠海一号高光谱卫星数据及应用概况[J].卫星应用,2019,8(1):12-18.
[18] 胡芳,曾海波,瞿丽.北京二号数据在基础性地理国情监测中的适用性分析[J].国土资源导刊,2019,16(4):58-62.
[19] 高分辨率对地观测系统湖北数据与应用中心.珞珈一号01星数据与应用服务[J].卫星应用,2019(5):26-29.
[20] FELLAH S, RZIZA M, HAZITI M. An efficient approach for filling gaps in Landsat 7 satellite images[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(1): 62-66.
[21] 本刊编辑部.德国将人工智能用于卫星间自主协调运行[J].无线电通信技术,2019,45(3):315.
[22] 肖寅.导航卫星自主导航关键技术研究[D].上海:中国科学院研究生院(上海技术物理研究所),2015.
[23] RAJAN J, BRODIE P, RAWICZ H. Modernizing GPS autonomous navigation with anchor capability[C]// 16th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas. VA:Institute of Navigation, 2003: 1534-1542.
[24] 温旭峰.星间链路条件下的北斗钟差观测与自主定轨策略研究[D].郑州:战略支援部队信息工程大学,2018.
[25] 侯芬,刘万科,方荣新.导航卫星自主定轨星座旋转误差分析与控制方法[J].武汉大学学报(信息科学版),2009,34(11):1280-1284.
[26] 陈金平,焦文海,马骏,等.基于星间测距/轨道定向参数约束的导航卫星自主定轨研究[J].武汉大学学报(信息科学版),2005,30(5):439-443.
[27] RAJAN J, ORR M, WANG P. On-orbit validation of GPS IIR autonomous navigation[C]// 59th Annual Meeting of the Institute of Navigation and CIGTF 22nd Guidance Test Symposium Manassas. VA:Institute of Navigation, 2003: 411-419.
[28] 苏天祥,文援兰,蓝柏强,等.基于锚固站的导航星座分布式自主定轨研究[J].大地测量与地球动力学,2014,34(3):111-115.
[29] ANANDA M P, BERNSTEIN H, CUNNINGHAM K E, et al. Global positioning system (GPS) autonomous navigation[C]// IEEE Position Location & Navigation Symposium. Washington D.C., USA: IEEE Press, 2002: 497-508.
[30] XIONG K, Wei C, LIU L. Autonomous navigation for a group of satellites with star sensors and inter-satellite links[J]. Acta Astronautica, 2013, 86: 10-23.
[31] YANG W, SHAO Y, WANG L, et al. Satellite constellation navigation method based on inter-satellite link and inter-satellite orientation[C]// 13th World Congress on Intelligent Control and Automation. Washington D.C., USA: IEEE Press, 2018: 211-216.
[32] HU Y, SHARF I, CHEN L. Three-spacecraft autonomous orbit determination and observability analysis with inertial angles-only measurements[J]. Acta Astronautica, 2020, 170: 106-121.
[33] HAN F, CHEN S, HE L, et al. Inter-satellite orientation observation and long-term autonomous orbit determination for constellation[C]// 64th International Astronautical Congress. 2013:4926-4932.
[34] XIONG K, WEI C, LIU L. The use of X-ray pulsars for aiding navigation of satellites in constellations[J]. Acta Astronautica, 2009, 64(4): 427-436.
[35] LI M, BO X, SUN J. Autonomous orbit determination for a hybrid constellation[J]. International Journal of Aerospace Engineering, 2018: 1-13.
[36] 房建成,宁晓琳,马辛,等.深空探测器自主天文导航技术综述[J].飞控与探测,2018,1(1):1-15.
[37] LIU S, YANG J, GUO X, et al. Inter-satellite link assignment for the laser/radio hybrid network in navigation satellite systems[J]. GPS Solutions, 2020, 24(2): 1-14.
[38] ZHANG T, KE L, LI J, et al. Fireworks algorithm for the satellite link scheduling problem in the navigation constellation[C]// 2016 IEEE Congress on Evolutionary Computation. Washington D.C., USA: IEEE Press, 2016: 4029-4037.
[39] DU Y, WANG L, XING L, et al. Data-driven heuristic assisted memetic algorithm for efficient inter-satellite link scheduling in the BeiDou navigation satellite system[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(11): 1800.
[40] SUN L, WANG Y, HUANG W, et al. Inter-satellite communication and ranging link assignment for navigation satellite systems[J]. GPS Solutions, 2018, 22(2): 1-14.
[41] YANG D, YANG J, XU P. Timeslot scheduling of inter-satellite links based on a system of a narrow beam with time division[J]. GPS Solutions, 2017, 21(3): 999-1011.
[42] 王东会,徐博,刘文祥,等.一种新的卫星导航星间链路测距体制及其定轨性能分析[J].国防科技大学学报,2014,36(1):62-66.
[43] MILAN M, BREGER L, J HOW. Analysis of decentralized estimation filters for formation flying spacecraft [C]// AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston, USA: AIAA Press, 2004:2004-5135.
[44] XUE K, WEN Y, LIAO Y, et al. Distributed orbit determination based on increased measurement covariance EKF for global navigation satellite system with inter-satellite link[C]// China Satellite Navigation Conference. 西安:中国卫星导航系统管理办公室,2015: 297-309.
[45] WEN Y, ZHU J, GONG Y, et al. Distributed orbit determination for global navigation satellite system with inter-satellite link [J]. Sensors, 2019, 19(5): 1031.
[46] HU Y, SHARF I, CHEN L. Distributed orbit determination and observability analysis for satellite constellations with angles-only measurements [J]. Automatica, 2021, 129(1): 109626.
[47] 苗赢.星载GPS技术在航天器编队定轨中的应用研究[D].哈尔滨:哈尔滨工业大学,2010.
[48] 张伟,杜耀珂,李东俊,等.基于星间测距增强的卫星编队GPS相对导航研究[J].上海航天(中英文),2017,34(3):95-101.
[49] 艾奇,王向,武静,等.基于多天线的星间GPS高精度相对定位方法[J].航天控制,2018,36(2):65-69.
[50] 孙秀聪,耿铖,贾振俊,等.一种高精度实时微纳卫星集群导航算法:CN111487660A[P].2020-04-24.
[51] CHAVEZ F, LOVELL T. Relative-orbit element estimation for satellite navigation and guidance[C]// AIAA/AAS Astrodynamics Specialist Conference and Exhibit. Reston, USA: AIAA Press, 2012: 2004-5214.
[52] 陈韵,周军.基于激光雷达测量的空间交会对接相对导航[J].航天控制,2006,24(1):24-28
[53] 周凤歧,孙东,周军.基于非线性滤波技术的多航天器编队飞行相对导航[J].宇航学报,2005,26(2):212-216.
[54] WOFFINDEN D, GELLER D. Observability criteria for angles-only navigation[J]. IEEE Transactions on Aero-space and Electronic Systems, 2009, 45(3): 1194-1208.
[55] GELLER D, KLEIN I. Angles-only navigation state observability during orbital proximity operations[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(6): 1976-1983.
[56] BODIN P, NOTEBORN R, LARSSON R, et al. The prisma formation flying demonstrator: overview and conclusions from the nominal mission[J]. Advances in the Astronautical Sciences, 2012, 144: 441-460.
[57] KLEIN I, GELLER D. Zero Δsolution to the angles-only range observability problem during orbital proximity operations[C]// Advances in Estimation, Navigation, and Spacecraft Control. Berlin, Germany: Springer, 2015: 351-369.
[58] ARDAENS J, GAIAS G. Angles-only relative orbit determination in low earth orbit[J]. Advances in Space Research, 2018, 61(11): 2740-2760.
[59] 尤岳.空间碎片清除仅测角相对导航与机动规划[D].长沙:国防科技大学,2017.
[60] FRANQUIZ F, MUNOZ J, UDREA B, alet, Optimal range observability maneuvers of a spacecraft formation using angles-only navigation[J]. Acta Astronautica, 2018, 153: 337-348.
[61] LUO J, GONG B, YUAN J, et al. Angles-only relative navigation and closed-loop guidance for spacecraft proximity operations[J]. Acta Astronautica, 2016, 128: 91-106.
[62] GELLER D, PEREZ A. Initial relative orbit determination for close-in proximity operations[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(9): 1833-1842.
[63] GONG B, LI W, LI S, et al. Angles-only initial relative orbit determination algorithm for noncooperative spacecraft proximity operations[J]. Astrodynamics(in English), 2018, 2(3): 217-231.
[64] GONG B, GELLER D, LUO J. Initial relative or-bit determination analytical covariance and performance analysis for proximity operations[J]. Journal of Spacecraft and Rockets, 2016, 53(5): 822-835.
[65] GAIAS G, AMICO S, ARDAENS J. Angles-only navigation to a non-cooperative satellite using relative orbital elements[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(2): 439-451.
[66] 韩飞,梁彦,郭雯婷,等.一种用星上视线角度信息的相对导航方法:ZL201110011003.1[P].2015-7-15.
[67] HAN F, WANG Z, HAN Y, et al. Angles-only relative navigation in spherical coordinates using unscented kalman filter[C]// Proceedings of the 39th Chinese Control Conference. Washington D.C., USA: IEEE Press, 2020: 3444-3451.
[68] SHUBHAM G. Initial relative-orbit determination using second-order dynamics and line-of-sight measurements[D]. Alabama: Auburn University, 2015.
[69] PEREZ A, GELLER D, LOVELL T, Non-iterative angles-only initial relative orbit determination with J2 perturbations[J]. Acta Astronautica, 2018, 151: 146-159.
[70] 高学海,梁斌,潘乐,等.高轨非合作目标多视线分布式相对导航方法[J].宇航学报,2015,36(3):292-299.
[71] 袁满.基于仅测角信息大椭圆轨道编队相对导航方法研究[D].哈尔滨:哈尔滨工业大学,2017.
[72] 王楷,陈统,徐世杰.基于双视线测量的相对导航方法[J].航空学报,2011,32(6):1084-1091.
[73] TONG C, XU S. Double line-of-sight measuring relative navigation for spacecraft autonomous rendezvous[J]. Acta Astronautica, 2010, 67: 122-134.
[74] 王楷,徐世杰,黎康,等.双视线测量相对导航方法误差分析与编队设计[J].航空学报,2018,39(9):147-161.
[75] 韩飞,刘付成,王兆龙,等.空间多机器人协同的多视线仅测角相对导航[J].航空学报,2021,42(1):316-326.
[76] MATSUKA K, FELDMAN A, LUPU E, et al. Decentralized formation pose estimation for spacecraft swarms[J]. Advances in Space Research, 2021, 67(11): 3527-3545.
[77] MATSUKA K, LUPU E, NAKKA Y, et al. Distributed multi-target relative pose estimation for cooperative spacecraft swarm[C]// 10th International Workshop on Satellite Constellations and Formation Flying. Delft: IWSCFF,2019: 1-12.
[78] BEZOUSKA W, BARNHART D. Decentralized cooperative localization with relative pose estimation for a spacecraft swarm[C]// 2019 IEEE Aerospace Conference, Rockville. Washington D.C., USA: IEEE Press, 2019: 1-13.
[79] 龚柏春,王沙,李爽.一种基于一致性滤波的航天器集群仅测距相对导航方法:201910378857.X[P].2019-05-08.
[80] GONG B, WANG S, HAO M, et al. Range-based collaborative relative navigation for multiple unmanned aerial vehicles using consensus extended Kalman filter[J]. Aerospace Science and Technology, 2021, 112: 106647.
[81] GONG B, LI S, SHI J, et al. Rotation based analytic range-only initial relative orbit solution for natural-periodic motion[J]. Acta Astronautica, 2021, 178: 584-594.
[82] MA L, HUANG P, HAN F, et al. Fingerprint localization method for leader-follower satellite cluster based on dynamic radio map[C]// 2020 IEEE Global Communications Conference. Washington D.C., USA: IEEE Press, 2020:1-6.
[83] BARNHART D, DUONG R, VILLAFANA L, et al. The development of dynamic guidance and navigation algorithms for autonomous on-orbit multi-Satellite[C]// 70th International Astronautical Congress. Washington D.C., USA: IAF, 2019:1-14.
[84] LEDERGERBER A, HAMER M, ANDREA R, A robot self-localization system using one-way ultra-wideband communication[C]// IEEE/RSJ International Conference on Intelligent Robots & Systems. Washington D.C., USA: IEEE Press, 2015: 3131-3137.
[85] FOUST R, CHUNG S, HADAEGH F. Solving optimal control with nonlinear dynamics using sequential convex programming[C]// AIAA SciTech Forum. Reston, USA: AIAA Press, 2019: 2019-0652.
[86] WANG P, HADAEGH F. Optimal formation-reconfiguration for multiple spacecraft[J]. Journal of Guidance, Control, and Dynamics 2008, 31: 686-696.
[87] WANG P, HADAEGH F. Minimum-fuel formation reconfiguration of multiple free-flying spacecraft[J]. Journal of Astronautical Sciences, 1999, 47(1): 77-102.
[88] 秦小林,罗刚,李文博,等.集群智能算法综述[J].无人系统技术,2021,4(3):1-10.
[89] KENNEDY J. Particle swarm optimization[C]// Proceeding of 1995 IEEE International Conference. Washington D.C., USA: IEEE Press, 2011: 1942-1948.
[90] DORIGO M, MANIEZZO V. Ant system: optimization by a colony of cooperating agents[J]. IEEE Transactions on Systems, Man and Cybernetics-Part B, 1996, 26(1): 29-41.
[91] KARABOGA D. An idea based on honey bee swarm for numerical optimization[R]. Technology Report, TR06, October 2005.
[92] ZAHADAT P, HAHSHOLD S, THENIUS R, et al. From honeybees to robots and back: division of labour based on partitioning social inhibition[J]. Bioinspiration & Biomimetics,2015,10(6):1-30.
[93] 王训,王兆魁,张育林.基于合作博弈的智能集群自主聚集策略[J].国防科技大学学报,2017,39(2):146-151.
[94] 张震,方群,宋金丰,等.基于协同粒子群算法的航天器集群动态路径规划算法研究[J].西北工业大学学报,2021,39(6):1222-1232.
[95] 韩博文,姚佩阳,孙昱.基于多目标MSQPSO算法的UAVS协同任务分配[J].电子学报,2017,45(8):1856-1863.
[96] 王婷,夏广庆,兰聪超.粒子群算法求解不等质量库仑卫星编队最优构型[J].系统工程与电子技术,2016,38(2):305-313.
[97] 周亮.航天器集群飞行的轨道保持与重构机动[D].西安:西北工业大学,2016.
[98] 谷海波,刘克新,吕金虎.集群系统协同控制:机遇与挑战[J].指挥与控制学报,2021,7(1):1-10.
[99] MORGAN D. Guidance and control of swarms of spacecraft[D]. Urbana-Champaign: University of Illinois at Urbana-Champaign, 2015.
[100]刘付成,梅杰,马广富.有向图中模块化航天器系统相对轨道的自适应分布式一致性[J].控制理论与应用,2014,31(2):223-229.
[101]刘付成,梅杰,马广富.带未知干扰的模块化航天器系统相对轨道的队形控制[J].控制与决策,2014,29(6):985-990.
[102]周稼康.航天器编队飞行分布式协同控制方法研究[D].哈尔滨:哈尔滨工业大学,2012.
[103]郑重.多航天器编队飞行分布式协同控制[D].哈尔滨:哈尔滨工业大学,2014.
[104]张博,罗建军,袁建平.多航天器编队在轨自主协同控制研究[J].宇航学报,2010,31(1):130-136.
[105]马培蓓,雷明,纪军.基于一致性的多无人机协同编队设计[J].战术导弹技术,2017(2):86-90.
[106]CHEN T, CHEN G. Distributed adaptive tracking control of multiple flexible spacecraft under various actuator and measurement limitations[J]. Nonlinear Dynamics, 2018, 91(3): 1571-1586.
[107]邓婉,王新民,王晓燕.无人机编队队形保持变换控制器设计[J].计算机仿真,2011,28(10):73-78.
[108]马广富,董宏洋,胡庆雷.考虑避障的航天器编队轨道容错控制律设计[J].航空学报,2017,38(10):1-11.
[109]何真,陆宇平,刘燕斌.基于虚拟结构的分布式编队控制方法[J].应用科学学报,2007,25(4):387-391.
[110]潘无为,姜大鹏,庞永杰,等.人工势场和虚拟结构相结合的多水下机器人编队控制[J].兵工学报,2017,38(2):326-334.
[111]夏春.移动机器人避障与多机器人围捕研究[D].武汉:华中科技大学,2007.
[112]陈宁.智能机器人动态路径规划研究[D].武汉:华中科技大学,2005.
[113]RIMON E, KODITSCHEK D. Exact robot navigation using artificial potential functions[J]. IEEE Transactions on Robotics and Automation, 1992, 8(5): 501-518.
[114]BADAWY A, MCINNES C. Small spacecraft formation using potential functions[J]. Acta Astronautica, 2009, 65(11):1783-1788.
[115]王涛,许永生,张迎春,等.基于行为的非合作目标多航天器编队轨迹规划[J].中国空间科学技术,2017,37(1):19-25.
[116]LIU G. Consensus and stability analysis of networked multiagent predictive control systems[J]. IEEE Transactions on Cybernetics, 2017, 47(4): 1114-1119.
[117]LIU G. Predictive control of networked multiagent systems via cloud computing[J]. IEEE Transaction on Cybernetics, 2017, 47(8): 1852-1859.
[118]GAO E, NING X, WANG Z, et al. Broad-RBFNN-based intelligence adaptive anti-disturbance formation control for a class of cluster aerospace unmanned systems with multiple high-dynamic uncertainties[J]. Hindawi Complexity, 2021, 2021: 1-12.
[119]张婷婷,蓝羽石,宋爱国.无人集群系统自主协同技术综述[J].指挥与控制学报,2021,7(6):127-136.
[120]TAN M. Multi-agent reinforcement learning: Independent vs. cooperative agents[C]// Proceedings of the Tenth International Conference on Machine Learning. Honolulu: ICMLA,1993: 330-337.
[121]TAMPUU A, MATIISEN T, KODELJA D, et al. Multiagent cooperation and competition with deep reinforcement learning[J]. PLoS One, 2015, 12(4): 1-12.
[122]USUNIER N, SYNNAEVE G, LIN Z, et al. Episodic exploration for deep deterministic policies: an application to starcraft micro management tasks[C]// International Conference on Learning Representations. Puerto Rico: ICLR,2016: 1609.02993.
[123]王毅然,经小川,田涛,等.基于强化学习的多Agent路径规划方法研究[J],计算机应用与软件,2019,36(8):165-171.
[124]ZHAO Y, ZHOU D, BAI C C, et al. Reinforcement learning based spacecraft autonomous evasive maneuvers method against multi-interceptors[C]// 3rd International Conference on Unmanned Systems. 2020: 1108-1113.
[125]LOWE R, WU Y, TAMAR A, et al. Multi-agent actor-critic for mixed cooperative-competitive environments[C]// Advances in Neural Information Processing Systems. Vancouver: NIPS,2017: 6379-6390.
[126]许宏才,张超,鲍军鹏,等.卫星健康管理系统的发展与探索[J].无线电工程,2020,50(6):429-436.
[127]TAFAZOLI M, A study of on-orbit spacecraft failures[J]. Acta Astronautica, 2009, 64: 195-205.
[128]YIN S, XIA L B, DING S, et al. A review on recent development of spacecraft attitude fault tolerant control system[J]. IEEE Transactions on Industrial Electronics, 2016, 63(5): 3311-3320.
[129]袁利,黄煌.空间飞行器智能自主控制技术现状与发展思考[J].空间控制技术与应用,2019,45(4):7-18.
[130]王文平,王向晖,徐浩,等.高分三号卫星自主健康管理系统设计与实现[J].航天器工程,2017,26(6):40-46.
[131]胡绍林,肇刚,郭小红,等.航天安全与健康管理技术研究述评[J].上海应用技术学院学报(自然科学版),2015,15(3):286-292.
[132]IVERSON D. System and method for outlier detection via estimating clusters: US-Patent-9,336,484 [P]. 2016-05-10.
[133]IVERSON D, MARTIN R, SCHWABACHER M, et al. General purpose data-driven monitoring for space operations [J]. Journal of Aerospace Computing Information & Communication, 2012, 9(2): 26-44.
[134]SPIRKOVSKA L, IVERSON D, HALL D, et al. Anomaly detection for next-generation space launch ground operations[C]// SpaceOps 2010 Conference Delivering on the Dream Hosted by NASA Marshall Space Flight Center and Organized. Reston, USA: AIAA Press, 2010: 2182.
[135]李瑞雪,张泽旭.国际空间站健康管理系统对我国空间站建设的启示[J].载人航天,2020,26(1):120-127.
[136]TAFAZOLI M. A study of on-orbit spacecraft failures[J]. Acta Astronautica, 2009, 64: 195-205.
[137]SHI W, SUN Y, WANG Z, et al. A study of PHM system and its fault forecasting model[J]. Fire Control and Command Control, 2009, 34(1): 29-35.
[138]WINTOFT P, LUNDSTEDT H, ELIASSON L, et al. Spacecraft anomaly analysis and prediction system-SAAPS[C]// Proceedings of the 7th International Conference. Noordwijk: European Space Agency. 2001: 169-176.
[139]KIRSCH M, AIREY S, CHAPMAN P, et al. Bearing noise detection, modeling and mitigation measures on ESA’s X-ray observatory XMM-NEWTON[C]//2014 GNC Conference. Boston: AIAA,2014: 827-838.
[140]YANG L, LI X, FENG C, et al.Research on autonomous health management and reconstruction technology of satellite[C]// International Conference on Signal and Information Processing, Networking and Computers. Berlin, Germany: Springer, 2018: 115-123.
[141]王文平,袁珺,元勇,等.实践十号返回式卫星自主安全控制策略设计[J].计算机测量与控制,2017,25(12):60-63,72.
[142]袁利,王淑一.航天器控制系统智能健康管理技术发展综述[J].航空学报,2021,42(4):525044.
[143]刘强,周经伦,金光,等.基于随机阈值的Gauss-Brown失效物理模型的动量轮可靠性评估[J].宇航学报,2009,30(5):2109-2115.
[144]MCMAHON P, LAVEN R. Results from 10 years of reaction/momentum wheel life testing[C]// 11th European Space Mechanisms and Tribology Symposium. Lucerne: European Space Agency,2005:109481446.
[145]SEBASTIAN S, PHILIPP H, ISABELLE B, et al. Fault-tolerant flight guidance system for UAS enabling full U-space integration[C]// AIAA SCITECH 2022 Forum. Reston, USA: AIAA Press, 2022: 1146.
[146]ZHU L, JIANG B, CHENG Y. Life prediction methods based on data-driven: review and trend[C]// 2016 IEEE Chinese Guidance, Navigation and Control Conference. Washington D.C., USA: IEEE Press, 2016: 1682-1686.
[147]吕琛.故障诊断与预测技术:原理、技术及应用[M].北京:北京航空航天大学出版社,2012:262-265.
[148]WANG X, KOU J, ZHANG W, et al. Incorporating physical models for dynamic stall prediction based on machine learning[J]. AIAA Journal Articles in Advance, 2022, 60:7.
[149]CHENG Y, WANG R, XU M. A combined model-based and intelligent method for small detection and isolation of actuators[J]. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2403-2413.
[150]李楠,张云燕,李言俊.一种自旋稳定卫星姿态传感器数据异常的诊断方法[J].宇航学报,2011,32(6):1327-1332.
[151]DAI C, PI D, FANG Z, et al. A novel long-term prediction model for hemispherical resonator gyroscope’s drift data[J]. IEEE Sensors Journal, 2014, 14(6):1886-1897.
[152]GAO Y, YANG T, LI W, et al. State trend prediction of spacecraft using PSO-SVR[J]. Lecture Notes in Electrical Engineering, 2014, 323: 337-345.
[153]VOSS S. Application of deep learning for spacecraft fault detection and isolation[D]. Delft: Delft University of Technology, 2019.
[154]CANSE Y, NAZIM K. Deep learning based fault tolerant thrust vector control[C]// AIAA SCITECH 2022 Forum. Reston, USA: AIAA Press, 2022: 0970.
[155]姜洪开,邵海东,李兴球.基于深度学习的飞行器智能故障诊断方法[J].机械工程学报,2019,55(7):27-34.
[156]DALLY K, KAMPEN E. Soft actor-critic deep reinforcement learning for fault-tolerant flight control[C]// AIAA SCITECH 2022 Forum. Reston, USA: AIAA Press, 2022: 2078.
[157]ELSAID A, WILD B, HIGGINS J, et al. Using LSTM recurrent neural networks to predict excess vibration events in aircraft engines[C]// 2016 IEEE 12th International Conference on e-Science. Washington D.C., USA: IEEE Press, 2016: 260-269.
[158]ALZAIDY A, HUSSEIN W, SAYED M, et al. Data driven models for satellite state of health monitoring and evaluation[J]. International Journal of Robotics and Mechatronics, 2018, 5(1): 1-11.
[159]KHAN S, YAIRI T. A review on the application of deep learning in system health management[J]. Mechanical System and Signal Processing, 2018, 107: 241-265.
[160]YU Z, ZHANG Y, JANG B, et al. A review on fault-tolerant cooperative control of multiple unmanned aerial vehicles[J]. Chinese Journal of Aeronautics, 2022, 35(1): 1-18.
[161]杨卓鹏,郑恒,李海生.基于ADC模型的导航星座系统效能分析[J].工业工程与管理,2016,21(3):145-152.
[162]杨卓鹏,郑恒,角淑媛,等.一种导航卫星的系统效能建模与分析方法[J].宇航学报,2017,38(6):647-654.
[163]许鹏飞,张伟华,马润年.基于熵权的改进ADC法通信基础网作战效能评估算法[J].火力与指挥控制,2013,38(1):64-68.
[164]刘仕雷,李昊.改进ADC方法及其在武器装备系统效能评估中的应用[J].国防科技大学学报,2017,39(3):130-135.
[165]陈辛.面向小卫星群的神经网络故障诊断技术研究[D].南京:南京航空航天大学,2018.
[166]席超,胡江燕,杨莹,等.基于数字孪生的巨型星座系统智能健康管理研究[C]//第十七届卫星通信学术年会.北京:中国通信学会,2021:374-379.
[167]李德政.低轨遥感卫星组网关键技术研究[D].合肥:中国科学技术大学,2020.
[168]夏茹敏,史可懿,何健,等.天地联合测控鲁棒性路由算法[J].上海航天(中英文),2021,38(4):8.
[169]WERNER M. A dynamic routing concept for ATM-based satellite personal communication networks[J]. Selected Areas in Communications IEEE Journal, 1997, 15(8): 1636-1648.
[170]HONG S, KIM B, CHANG G, et al. FSA-based link assignment and routing in low-earth orbit satellite networks[J]. IEEE Transactions on Vehicular Technology, 1997, 47(3): 1037-1048.
[171]AKYILDIZ I, EKICI E, BENDER M. MLSR: a novel routing algorithm for multilayered satellite IP networks[J]. IEEE/ACM Transactions on Networking, 10(3): 411-424.
[172]李红艳,张焘,张靖乾,等.基于时变图的天地一体化网络时间确定性路由算法与协议[J].通信学报,2020,41(10):14.
[173]HUANG M, CHEN S, ZHU Y, et al. Topology control for time-evolving and predictable delay-tolerant networks[J]. IEEE Transactions on Computers, 2013, 62(11): 2308-2321.
[174]TANG Z, FENG Z, HAN W, et al. Improving the snapshot routing performance through reassigning the inter-satellite links[C]//2015 IEEE Conference on Computer Communications Workshops. Washington D.C., USA: IEEE Press, 2015: 97-98.
[175]ARANITI G, BEZIRGIANNIDIS N, BIRRANE E, et al. Contact graph routing in DTN space networks: overview, enhancements and performance[J]. IEEE Communications Magazine, 2015, 53(3): 38-46.
[176]LOURENAO R, FIGUEIREDO G, TORNATORE M, et al. Post disaster data evacuation from isolated data centers through leo satellite networks[C]// IEEE International Conference on Communications. Washington D.C., USA: IEEE Press, 2017: 1-5.
[177]SHI K, LI H, SUO L. Temporal graph based energy-limited max-flow routing over satellite networks[C]// 2021 IFIP Networking Conference (IFIP Networking). Washington D.C., USA: IEEE Press, 2021: 1-3.
[178]WANG P, ZHANG X, ZHANG S, et al. Time-expanded graph-based resource allocation over the satellite networks[J]. Wireless Communications Letters IEEE, 2019, 8(2): 360-363.
[179]ZHANG T, LI H, ZHANG S, et al. STAG-based QoS support routing strategy for multiple missions over the satellite networks[J]. IEEE Transactions on Communications, 2019, 99: 6912-6924.
[180]曹素芝,孙雪,王厚鹏,等.星地融合网络智能路由技术综述[J].天地一体化信息网络,2021,2(2):11-20.
[181]XU S, WANG X, HUANG M. Software-defined next-generation satellite networks: architecture, challenges, and solutions[J]. IEEE Access, 2018, 6: 4027-4041.
[182]KREUTZ D, RAMOS F, VERISSIMO P, et al. Software-defined networking: a comprehensive survey[J]. Proceedings of the IEEE, 2015, 103(1): 14-76.
[183]AZZOUNI A, BRAHAM O, TRANG N, et al. Fingerprinting OpenFlow controllers: the first step to attack an SDN control plane[C]// 2016 IEEE Global Communications Conference. Washington D.C., USA: IEEE Press, 2016: 1-6.
[184]SUN W, LIANG J, XIAO N, et al. Intelligent Routing Scheme for SDN satellite network based on neural network[C]// IOP Conference Series Materials Science and Engineering. Bristol, UK: IOP Publishing, 2019: 052087.
[185]DUDUKOVICH R, PAPACHRISTOU C. Delay tolerant network routing as a machine learning classification problem[C]// 2018 NASA/ESA Conference on Adaptive Hardware and Systems. Washington D.C., USA: IEEE Press, 2018: 96-103.
[186]MAO Q, HU F, HAO Q. Deep learning for intelligent wireless networks: a comprehensive survey[J]. IEEE Communications Surveys & Tutorials, 2018, 20(4): 2595-2621.
[187]WANG Z, ZHANG J, ZHANG X, et al. Reinforcement learning based congestion control in satellite internet of things[C]// 2019 11th International Conference on Wireless Communications and Signal Processing. Washington D.C., USA: IEEE Press, 2019:1-6.
[188]DUDUKOVICH R, HYLTON A, PAPACHRISTOU C. A machine learning concept for DTN routing[C]// IEEE International Conference on Wireless for Space & Extreme Environments. Washington D.C., USA: IEEE Press, 2017: 110-115.
Key Technologies of Intelligent Control System for Distributed Cooperative Micro/Nano Remote Sensing Satellites
LIUFucheng1, HANFei2,3, HANYu2,3, WUHailei2,3, LIMuzi2,3, SHIKeyi4
(1.Shanghai Academy of Spaceflight Technology, Shanghai 201109, China; 2.Shanghai Aerospace Control Technology Institute, Shanghai 201109, China; 3.Shanghai Key Laboratory of Space Intelligent Control Technology, Shanghai 201109, China; 4.School of Telecommunications Engineering, Xidian University, Xi’an 710071, Shaanxi, China)
In recent years, the development of micro/nano remote sensing constellations has been continuous development. The time resolution of earth observation has been greatly improved through high-frequency revisiting. However, due to the limited observation capability of single micro/nano satellite, it is difficult to meet the data application needs such as multi-source fusion, high quality, and large bandwidth. In view of the aforementioned requirements, it is an effective way to build a distributed cooperative remote sensing system based on micro/nano satellites, in which the constellation distribution is used to obtain the high temporal resolution and the collaborative observation of star clusters on the constellation nodes is adopted to achieve multi-source, high-quality, and wide-format data. Since intelligent distributed cooperative control is the core of the system, it is necessary to study and solve the key technical problems such as autonomous navigation, intelligent motion planning and control, intelligent health management, and intelligent networking. In this paper, based on the analysis of recently distributed micro/nano remote sensing systems, the concept of distributed cooperative micro/nano remote sensing star cluster is provided. Four key technologies have been analyzed, to refine the development status and trends. The study could provide a reference for the follow-up relative research.
distributed cooperative remote sensing; autonomous navigation; intelligent planning and control; intelligent health management; intelligent network
2022‑04‑30;
2022‑06‑30
国家自然科学基金(U20B2056);上海市优秀技术带头人项目(19XD1431500);上海市自然科学基金(22ZR1427800)
刘付成(1973—),男,博士,研究员,主要研究方向为导航、制导与控制。
韩飞(1985—),男,博士,研究员,主要研究方向为卫星集群控制。
V 19; TP 79
A
10.19328/j.cnki.2096⁃8655.2022.04.001