无线电指令制导测量准确度标校及数据处理
2022-12-14黄鹏,陈丁,王笑
黄 鹏,陈 丁,王 笑
(1.陕西黄河集团有限公司 技术创新实验室, 西安 710043;2.西安工业大学 兵器科学与技术学院, 西安 710021;3.陕西黄河集团有限公司 设计研究所, 西安 710043)
1 引言
目前,无线电指令制导是地空导弹武器常采用制导方式之一,由于具有测量精度高、弹载设备简单、作用距离远、受天气影响小等优势,也可用于复合制导的初段或中段[1]。地空导弹武器在列装部队之前必须经历大量针对探测目标的跟踪及其性能校验,其中外场校飞是一项关键环节,可在贴近与实际战场环境条件下,以校验制导系统的工作性能,尤其是测量精度。该项指标在雷达标校领域常用“准确度”和“精密度”来表征,其中准确度表示的是测量结果中系统误差的大小程度[2]。因此,合理使用校飞试验测试数据,可有效地校正雷达实际测量结果,最终达到提高测量准确度的目的。因此,校飞试验数据合理获取与优化处理,对节约外场校飞试验成本,确保装备定型试验时限,加快新型武器装备研制进程有重要的促进意义。
为了实现上述目标,一些校飞试验标校数据获取方法及其数据优化处理手段被广泛地应用于该研究领域。在外场校飞试验中,标准值测量设备(亦称“标校设备”)与被试制导系统同步测量目标实时坐标值,将两者获得的数据进行对比,经过一定算法处理,计算出制导系统测量准确度,一般采用卫星定位系统(global positioning system,GPS)[3]、光电经纬仪[4]、机载广播式自动监视系统(automatic dependent surveillance broadcast,ADS-B)[5]等设备单独或组合形式作为标校设备,上述设备获得均为目标绝对坐标测量结果,但测量误差随着校飞时间或距离增加会有增大的趋势,对靶机飞行范围与设备运行时间有所限制,影响了整个外场校飞试验的连续性。此外,标校设备在校飞试验中受内部因素(如内部噪声、电气特性、系统故障等),外界环境因素(电磁干扰,温度、湿度、冲击、振动等)及操作人员主观因素的影响,标校数据中会偏离正常数据趋势的异常点(“野值”)[6],野值的存在会歪曲标校数据概率分布特征,严重地影响了制导系统测量准确度的标校结果。因而,必须对标校数据进行预处理,检测、识别野值,并加以剔除。通常,可以采用固定阈值判决[7]、卡尔曼滤波[7]、最小二乘法[8]、外推拟合法[9]等标校数据进行有效剔除,然后再采用莱特准则、罗曼诺夫斯基准则、格拉布斯准则及肖维勒准则等[10]进行事后野值剔除。上述方法要么对标校设备的适应性有所差异,对统计特性具有约束性,要么仅对某些特定类型的野值(孤立型或斑点型)有效,或者在线实时处理海量数据压力较大。因此,在校飞试验中应选择合理标校方法,优化处理后的标校数据不但可以有效地剔除孤立型野值,也要抑制斑点型野值的影响,且数据处理方法简单可行、实时性较高。
本研究中所提出的一种适用于无线电指令制导系统测量准确度标校方法,其主要包含两部分,即校飞试验标校数据获取与异常标校数据的处理方法。首先,所提出的弹目合一的标校数据获取方法,可低成本、有效地获取飞行距离段上完整的标校数据。此外,根据标校数据概率分布特性,构建一阶子样矩估计的自适应检测方法,采用滑窗形式对斑点型野值进行提出,完成标校数据一次处理,然后再采用莱特准则有效地剔除孤立型野值,实现对校数据二次处理。最终,对处理后的标校数据进行概率分布类型判断是否符合正常数据分布类型,并通过多种方式的外场校飞试验对文中所提出的测量准确度标校方法进行了对比验证。
2 校飞试验标校数据的获取
对于无线电指令制导系统,由制导站(即雷达)精密测定且跟踪锁定目标位置信息,同时发送各项运动参数的无线电控制指令,遥控导弹准确地飞向被锁定的攻击目标。当弹载应答器收到无线电指令后,按照约定时间开始发送应答信号,通过测量应答信号达到时间及单脉冲和差测角原理,可获得导弹实时的位置信息。此时,制导系统根据目标与导弹之间位置关系,经过计算和变化后再次形成新的无线电指令,当导弹接收到后,不断地修正飞行状态,最终命中并击毁已锁定的目标。为了能准确地获取被攻击目标和导弹两者的精确位置信息,无线电指令制导系统使用前必须进行标校。
2.1 工作原理
一般来说,需要对地空制导武器系统中分别负责被攻击目标(即靶机)与导弹位置信息的两套测量系统分别进行校正,那么就需要两套独立的标校设备[11-13]。在校飞行试验中,靶机与导弹位置信息的标校值分别来自两套标校设备。显然,两套标校设备并行使用不但增加了单次校飞试验成本,而且不同两套标校设备的测量原理不同,测量系统坐标系也不尽相同,造成了标校处理中海量数据处理压力剧增,而且多种坐标系之间非线性转换也会导致一个重要的问题,即随着校飞时间或距离积累而测量误差有不断增大趋势。
本研究中将根靶机与导弹合二为一,即将安装在导弹上的无线电指令与应答装置安装在靶机机身底部。对于无线电指令制导系统来说,此时的导弹与靶机可以视为是同一个目标,故称之为“弹目合一”。据无线电指令制导系统测量原理可知,获取被攻击目标和导弹都是在同一相对坐标系(NEH坐标,又称北东天坐标,遵循左手坐标系定则)下的位置信息,该坐标原点是探测雷达天线回转轴在大地上投影点,可得到两者位置信息用大地极坐标形式。
因此,目标实时位置坐标可表示为:
(1)
式中:PO为目标实时位置坐标;εO为方位角(又称“夹北角”)真值;βO为高低角真值;RO为被测目标到原点的直线距离真值;ΔεO为方位角系统误差;ΔβO为高低角系统误差;ΔRO为被测目标到原点的直线距离系统误差;δO为目标实时位置的随机误差矩阵,上述信息来源于探测雷达。
同理,导弹实时位置坐标也可表示为同样形式:
(2)
式中:PM为导弹实时位置坐标;εM为方位角(又称“夹北角”)真值;βM为高低角真值;RM为导弹到原点的直线距离真值;,ΔεM为方位角系统误差;ΔβM为高低角系统误差;ΔRM为导弹到原点的直线距离系统误差;δM为导弹实时位置的随机误差矩阵。上述信息通过测量应答信号而获得。
标校的目的是希望两者的系统误差趋近于0,即ΔεO=0,ΔβO=0,ΔRO=0与ΔεM=0,ΔβM=0,ΔRM=0。校飞试验中,靶机常扮演被攻击目标角色,而在本课题中则将安装在导弹上应答器也安装在靶机机身下部,即实现目标与导弹合二为一的形式(如图1所示)。理想状态下,探测雷达获取目标实时位置信息应与从应答器发送应答信号得到导弹的位置信息应该一致。实际情况下,两者实际测量值存在一定差异,但两者真值应当相同,即εO=εM,βO=βM,RO=RM,而两者系统误差存在差异,即ΔεO≠ΔεM,ΔβO≠ΔβM,ΔRO≠ΔRM。经标校后,两者测量差值统计均值应为0。
(3)
由于靶机和导弹合二为一,式(3)第一项应为0,第三、四项为随机误差一般服从均值为0的正态分布,因此只有第二项也为0时才能达到标校的目标,即两者系统误差一致即可相互抵消。因此,只需要对两套坐标测量系统其中之一进行补偿,就可实现校正无线电指令制导系统准确度的目的,一般来说只针对制导站(即探测雷达)进行补偿比较方便。
图1 无线电指令制导系统校飞试验原理图Fig.1 Schematic diagram of the calibration flight test for guidance system based on radio command
2.2 可行性分析
为了验证上述方法可行性,必须排除由于系统内因所造成误差异常增大的可能。针对技术状态已经固化制导站系统,采用1 kHz和10 kHz两种不同的脉冲重复频率(记为A因子)、 5 MHz和20 MHz两种不同的信号带宽(记为B因子),2种不同的应答信号(记为C因子),并考虑上述因素交互作用。为了减少试验次数,采用多元方差分析[14]中的正交试验设计。
在此正交试验中,存在A、B、C共3个因子,每个因子有1/2两种水平,A×B为脉冲重复频率与带宽交互作用,B×C为带宽与应答信号交互作用,B×A为脉冲重复频率与应答信号交互作用,列出正交试验如表1所示,表1中1、2分别代各自因子2种水平。
表1 正交试验设计表

QA=UA-P,QB=UB-P,QC=UC-P
QAB=UAB-P,QBC=UBC-P
QAC=UAC-P,QT=W-P
又规定QE=QT-QA-QB-QC-QAB-QBC-QAC,可得方差分析结果,如表2所示。
给定显著水平α=0.05,查表得F0.05(1,7)=5.59,将正交试验产生的距离,方位角、俯仰角测量值代入表1和表2,发现脉冲重复频率、信号带宽和应答信号及其交互作用都小于5.59,说明这3种内因对误差影响不显著,该方法是可行的。
表2 方差分析结果
3 异常标校数据的处理方法
3.1 两类常见的野值类型
经过多元方差分析,可知上述标校试验方法不会引起测量误差显著增大。但在实际测量数据中往往存在有比正常值偏大或偏小的值(称之“野值”或“离群值”),这些野值来源不是系统本身,而是多来源于操作失误、数据传输路线故障、电磁环境因素等,必须将明显不合理的“野值”进行剔除,否则引起系统误差估计产生偏差,严重影响校正测量准确度的效果。在规定的样本中检测出野值数量若超过某个上限值(与样本量相比应较小,本试验中一般取上限值为10%),对于这个样本应该做出慎重地研究和处理,一般视为作废实验数据加以抛弃,不能用于系统测量准确度标校。
通常,野值分为孤立型和斑点型两大类(如图2所示)。当ti时刻出现某一异常值,而其相邻的时刻数据为正常,在母体不相依情形下,动态测量数据中孤立异常值就是孤立型野值,也是目前最常见的情形之一。处理方法为:① 根据先验知识或实际情况,分别选择已知标准差情况下的野值判断规则(即奈尔检测法)、未知标准差情况野值判断规则(即狄克逊法或偏度-峰度法);② 确定适当的显著水平(取α=0.05);③ 根据显著水平及样本量,计算出检验阈值;④ 将观测值或由其所换算出的量与该阈值相比较进行判断;⑤ 当野值个数占样本量达到规定上限值(如10%)时,将立即停止,若未达到上限值时,重复执行从①到④的步骤;⑥ 最终,全部数据比较完毕后,若野值占比超过或达到规定上限值,视为作废试验数据并加以抛弃,若野值占比低于规定上限值,剔除野值后数据集可用于系统测量准确度标校[15]。
在雷达跟踪高仰角测量系统测量准确度标校中,比较常见的是斑点型与孤立型野值并存的情况。针对斑点型野值的判断与处理,孤立型野值的判断和处理方法不但数据处理效率较低,且斑点型成片出现异常数据也会影响到数据总体概率统计特性,从而导致检验阈值选取产生较大偏差,甚至会导致误判或漏判的情况出现。此外,也有专门针对斑点型野值判断与处理方法,但对孤立型野值通常是无效的。
此外,卡尔曼滤波、αβ滤波等数据平滑处理手段在雷达目标航迹跟踪领域应用中较为成熟。但在校飞试验数据处理中,针对不同类型野值(如孤立型和斑点型)若采用固定的步长,则处理效果较差;针对不同类型野值(孤立型和斑点型)则必须相应地调整步长,而基于自适应步长的滤波处理算法实现难度较大,步骤繁琐,特别是在工程应用中严重地影响了实时性,不利于海量标校数据的处理。在相关技术标准规范中[6],推荐使用的孤立型和斑点型野值处理方法较为简单,数据处理能力较好,实时性较强。基于上述优势,故本文拟采用了2种成熟可靠性方法进行叠加处理使用。
图2 孤立型野值距离测量误差曲线(a)和直方图(b)Fig.2 Schematic diagram of isolated outlier
3.2 并存两类野值的处理方法
本文将以高低角测量系统测量准确度标校中的野值判决与处理为例,提出一种既能有效判决斑点型野值,亦能有效判决孤立型野值的处理方法,处理思路如图3所示。
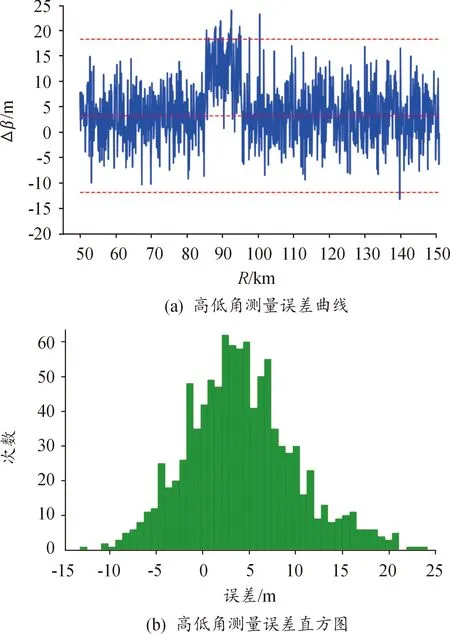
图3 斑点型野值高低角测量误差曲线(a)和直方图(b)Fig.3 Schematic diagram of the spot outlier
首先,进行斑点型野值判决,如果超过10%视为作废视距;如果未超过10%,对剔除该斑点型野值后的数据进行概率分布统计,根据剩余数据的概率分布参数生成相同长度的数据代替这段被剔除的野值。通常来说,斑点型野值判决方法对孤立型效果甚微,孤立型野值无法判决进行剔除。
其次,再进行孤立型野值判决。如果超过10%视为作废视距;如果未超过10%,对剔除该孤立型野值后的数据进行概率分布统计,根据剩余数据的概率分布参数生成相同长度的数据代替这段被剔除的野值。
最终,将产生一组有效地标校数据以供标校使用。
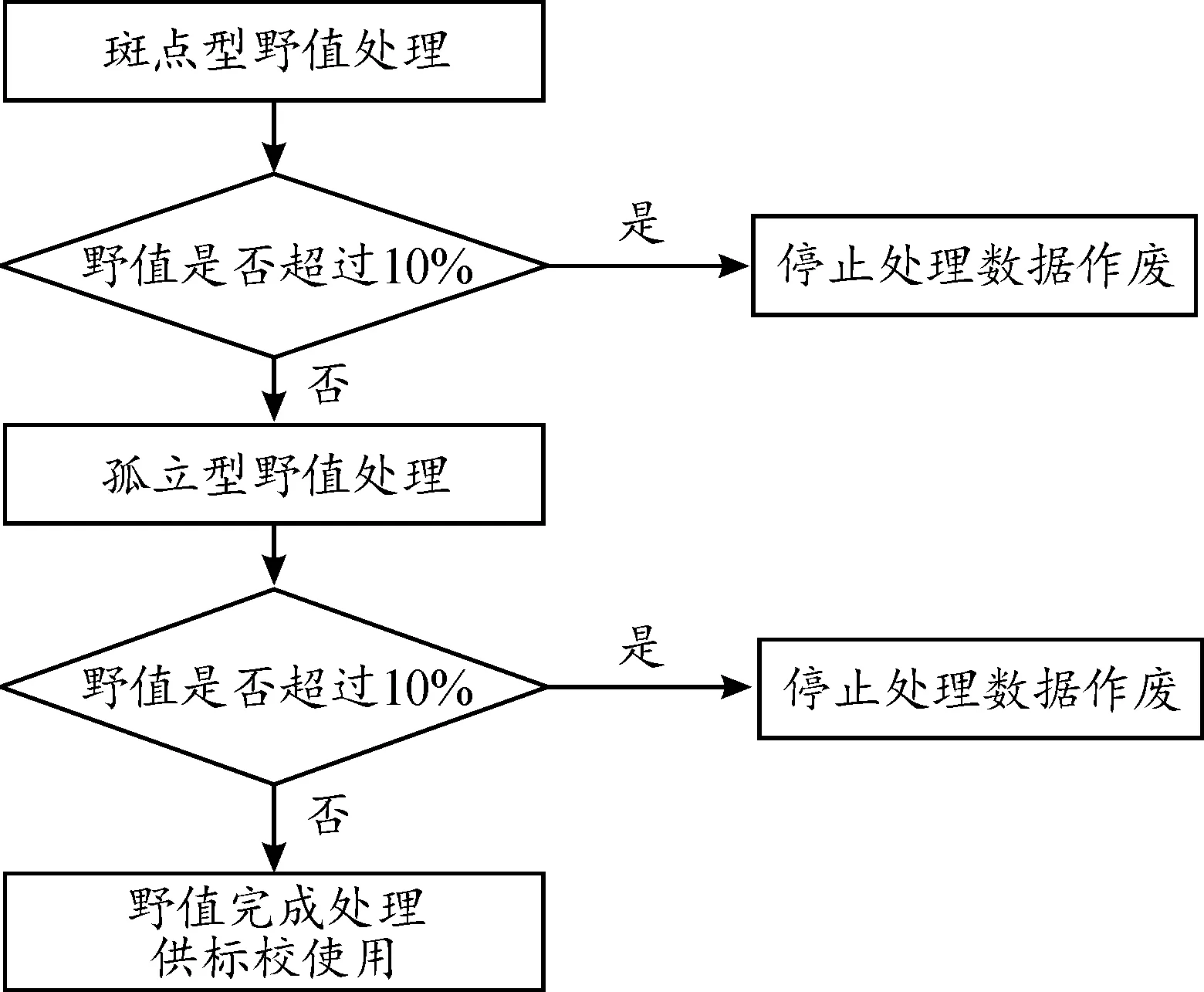
图4 野值处理流程框图Fig.4 Flowchart of the outlier processing
3.2.1斑点型野值处理
为了处理斑点型野值,采用一种滑窗形式的平均单元结构来获取校准数据的子样一阶矩(即均值),以自动调节检测门限。如图5所示,为斑点型野值自适应门限检测器结构示意图,源于探测器的N+M+K个数据依次进入滑窗进行处理。在滑窗中,最中间一个单元称之为“检测单元”,在其前后两侧分别添加N/2个“保护单元”,组成一组“中间单元”。这样做的目的是为了受到噪声边界效应显著的影响。要注意的是N应该取偶数,N+1长度不能过于宽,如果远远超过动斑点型野值宽度的话,会造成自适应检测失效,有用标校数据被当成野值处理。类似地,在中间单元前后两侧也分别添加两组各M/2个参考单元(M必须取偶数个)。M数量的选择可以遵循以下原则,当标校数据波动比较平缓时,M可以取略微大一些;反之,当标校数据波动比较剧烈时,M可以取略微小一些。通过对两组参考单元的均值求和,就可以得到求解自适应门限所需的概统统计参量(即均值Z)。为了优化检测器的性能,在模型中添加一个调节因子K(默认取1),以获得较为理想的检测门限K·Z。最终,通过检测单元x子样一阶矩与检测门限K·Z比较,以实现有效标校数据与野值数据的二元分类(即信号检测),即检测单元x子样一阶矩大于检测门限K·Z,认为该数据是就是斑点型野值;反之,则归类为有效标校数据。新采样数据不断被输送给检测器,其概率统计参量在变化,实时检测门限也随着变化,即可实现自适应门限检测工作流程。最终,被检测出来的斑点型野值被判决出来,并统计被剔除野值数据在总子样比值,如果超过10%,认为该组标校数据失效,并停止处理。反之,最终野值占比小于10%,可认为该组修正数据是有效的。
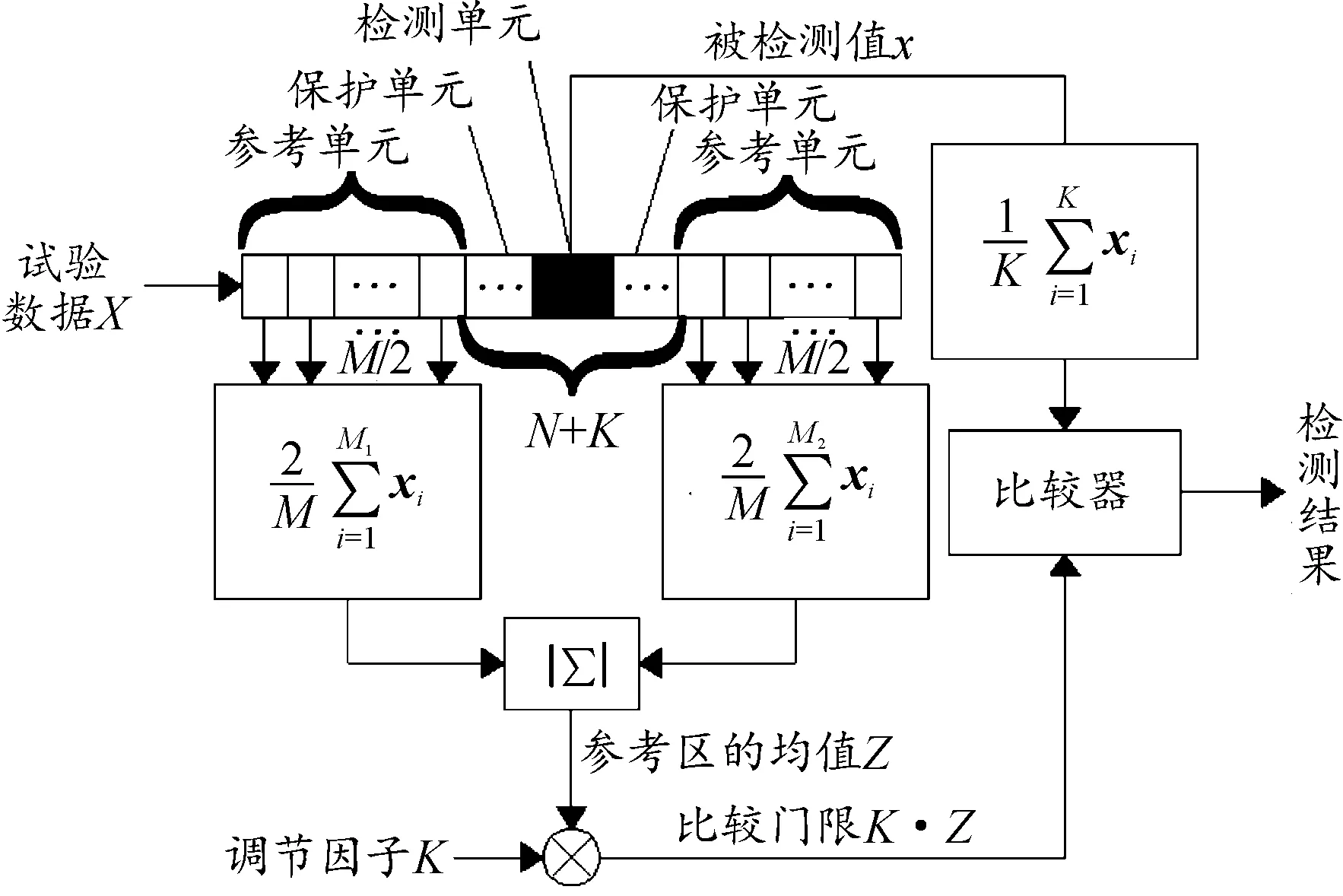
图5 斑点型野值自适应门限检测器结构示意图Fig.5 Schematic diagram of the structure of an adaptive threshold detector for spot outlier
这种方法通常对孤立型野值的判决效果极其有限,孤立型野值与周围正常数据平均后很难判决出来,除非缩短检测单元的长度,但这也严重地影响了斑点型野值的判决效率。因此,斑点型野值与孤立型野值无法同时进行处理,待斑点型野值处理之后再专门进行孤立型野值的处理。
3.2.2孤立型野值处理
经过斑点型野值处理后,标校数据中仅剩孤立型野值。由于校飞试验是严格按照相关国军标所规定的试验测试条件所进行的,通常信号噪声分布服从高斯分布。故标校数据服从正态分布,即使剔除了一部分斑点型野值后,剩余的样本主体仍然服从正态分布,但是孤立型野值属于极端值,比较明显的偏离样本主体,故应采用偏度-峰值检测法的重复处理方法。孤立型野值存在有2种情况,即单侧和双侧。
1) 单侧情况(偏度检测法)
野值偏度统计量bs的值为:
(4)
式中:x为标校数据样本;n为样本个数。
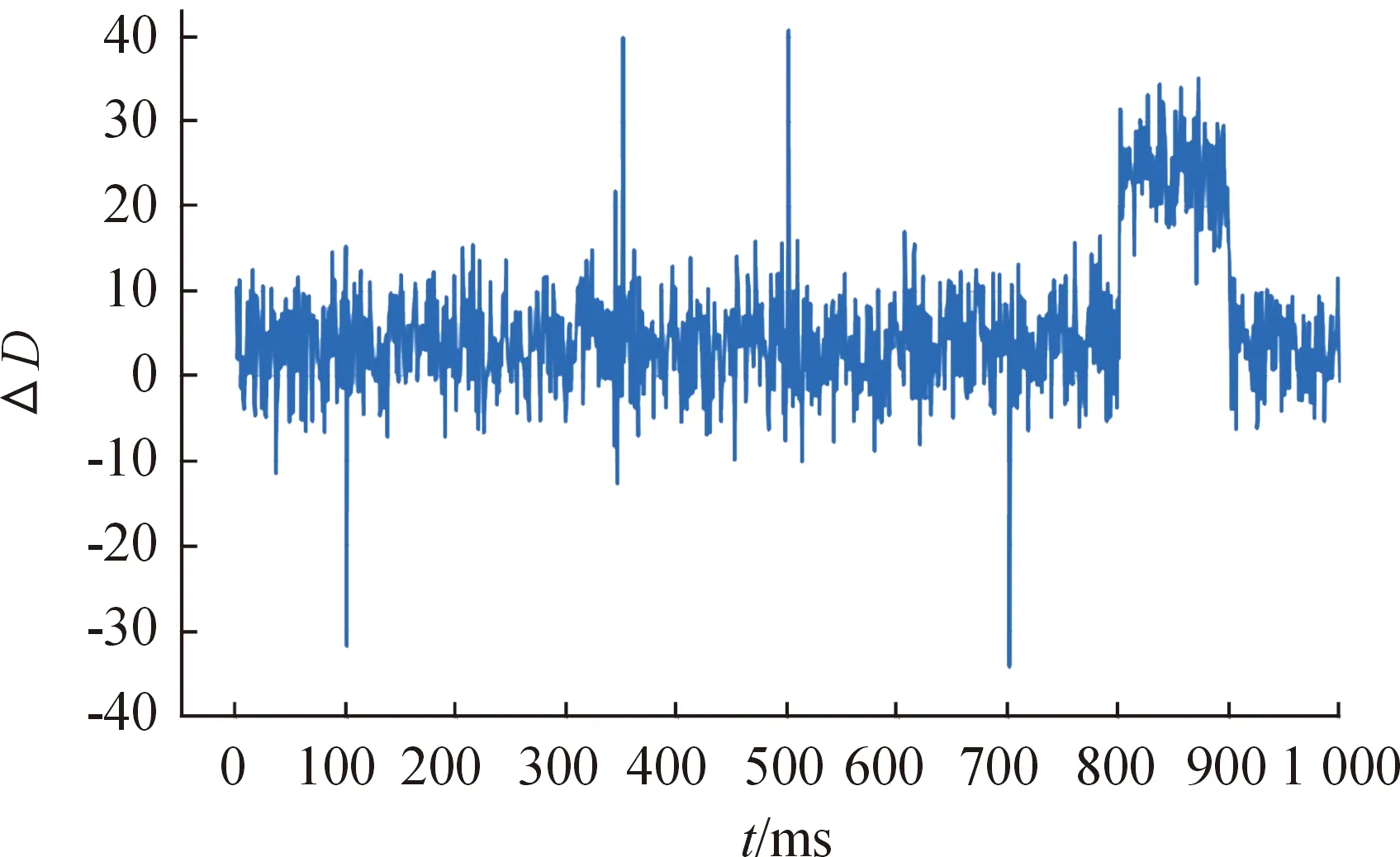
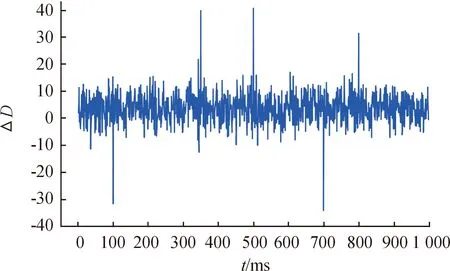
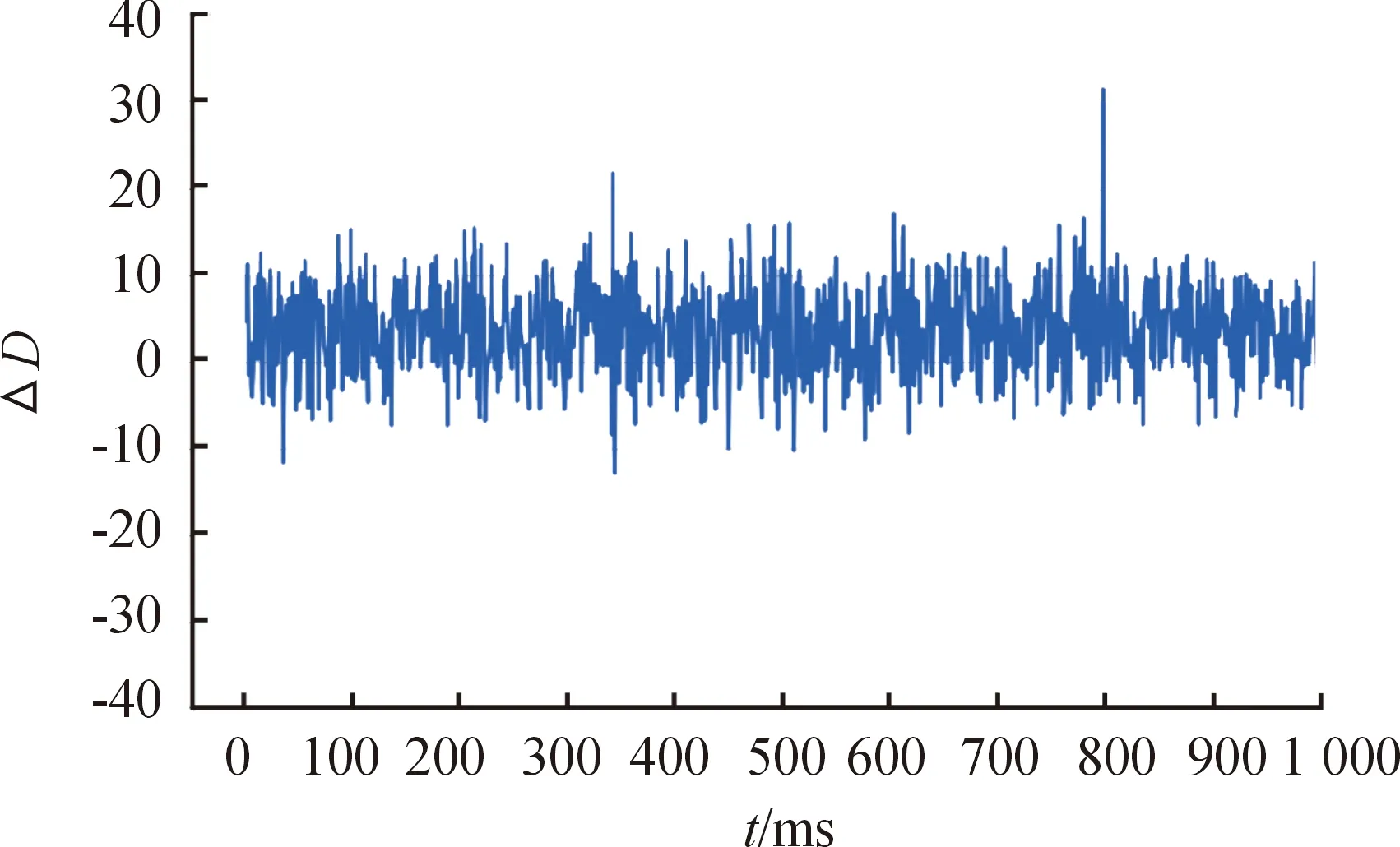
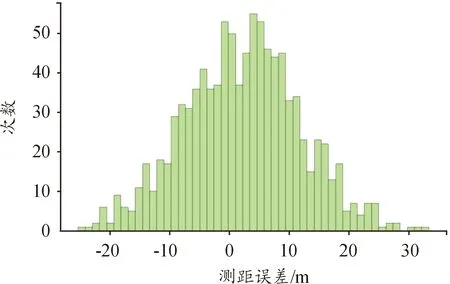
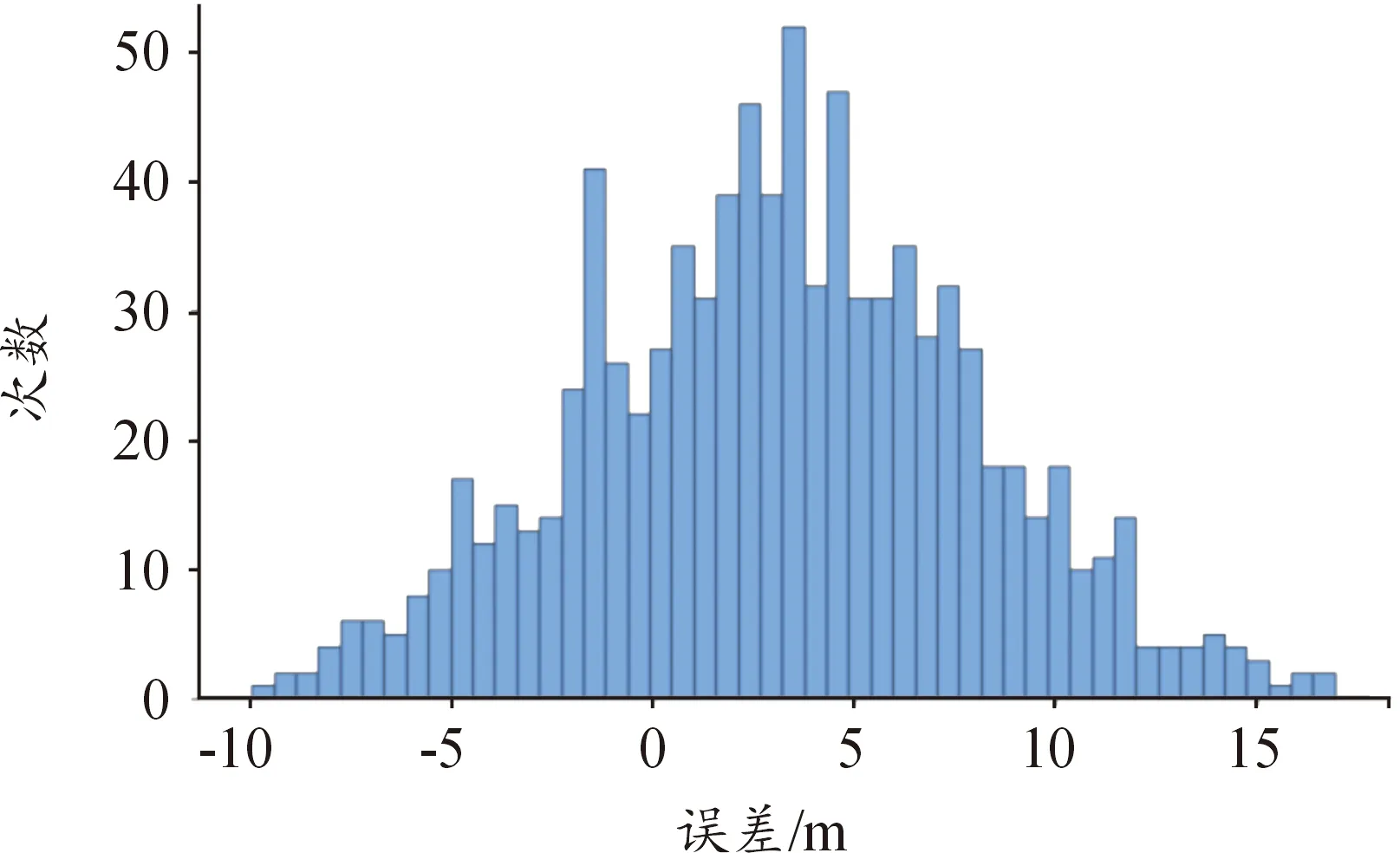
确定检出水平α=0.95或0.99,通过偏度临界值表查出临界值b1-α(n)。当野值在分布曲线峰值的右侧时,若bs>b1-α(n)时,判断x中子样的最大值xmax是野值,否则不是野值;当野值在分布曲线峰值的左侧时-bs 2) 双侧情况(峰度检测法) 野值峰度统计量bk的值为: (5) 式中:x为标校数据样本,n为样本个数。 最终,被检测出来的孤立型野值被剔除,并统计被剔除野值数据在总子样比值,如果超过10%,认为该组标校数据失效,并停止处理。反之,最终野值占比小于10%,可认为该组修正数据是有效的。 由于孤立型与斑点型野值的出现具有随机不确定性,特别是在较短的校飞距离内或校飞时间段内,若要专门等待孤立型与斑点型野值同时出现,必须无限地增大校飞试验架次,巨额的校飞试验成本是无法接受的,显然这种验证方法并不可取。可利用半实物仿真平台[16-17],专门生成同时含有孤立型与斑点型野值的一段连续回波中频信号及应答信号,直接灌入雷达中频接收机及应答接收机中,且半实物仿真实验平台与被校正雷达系统保证严格相参关系,测量参考值(即可视为真值)已知且可控,同样可以达到类似外场校飞试验的效果,以实现验证该算法的目的。 采用半实物仿真平台产生一组同时含有孤立型与斑点型野值的标校数据(野值占比<10%)。为了便于观察,人为地在数据前半段时间内故意设置4个独立性野值,而斑点型野值分布在数据后半部分(如图6所示)。该标校数据处理按照本研究中提出的野值处理流程进行。 图6 半实物平台产生的标校数据曲线Fig 6.Calibration data generated by Semi-physical simulation platform 首先,通过斑点型野值判决方法将斑点型野值挑选出来并剔除,获取剩余的标校数据概率分布参数(如均值和标准差),根据该概率分布参数生成与斑点型野值长度相同的一段随机数据来代替斑点型野值,如图7所示。 图7 斑点型野值剔除后的标校数据曲线Fig.7 Calibration data after eliminating spot outlier 其次,此时的标校数据仅剩4个孤立型野值。通过孤立型野值判决方法将孤立型野值挑选出来并剔除,获取剩余的标校数据概率分布参数,根据该概率分布参数随机生成4个数据点代这4个孤立型野值,如图8所示。 图8 孤立型野值剔除后的标校数据曲线Fig.8 Calibration data after eliminating isolated outlier 最后,孤立型与斑点型野值均被剔除后的数据可供标校无线电指令指导测量准确度标校使用。 由于测距标校数据仅有孤立型野值,根据偏度-峰值检测法,将双侧偏离极限值进行剔除后,其误差分布如图9所示。 图9 剔除野值后的距离测量误差分布直方图Fig.9 Distribution of the error from pitch angle measurement after eliminating outlier 由剔除后的距离误差标校数据,可计算出均值为4.5 m,可以认为这就是系统误差,对于实时距离测量值减去这个值,即可对距离测量准确度完成标校。 由于高低角测量标校数据既有孤立型野值,也有斑点型野值的情况,可根据图4的处理步骤,先使用滑窗式的自适应检测器剔除斑点型野值,然后再使用偏度-峰值检测法,最终处理结果如图10所示。 图10 剔除野值后的高低角测量误差分布直方图Fig.10 Distribution of the error from distancemeasurement after eliminating outlier 由剔除后的高低角误差标校数据,可计算出均值为4.75 mil,可以认为这就是系统误差,对于实时高低角测量值减去这个值,即可对距离测量准确度完成标校。上述经过异常值处理后的数据概率分布特征更加趋近于较为理想的高斯分布曲线,说明已经达到了野值剔除的目的。此外,方位角、速度等参数系统测量准确度标校也可以参照上述方法进行操作,在此不必赘述。 本项目研究旨在有效地降低单次校飞试验成本,提高标校数据的利用率,从而减少不必要的补充校飞架次,确保装备定型试验时限,而追求更好的准确度不是本文研究目标。工程上,只要标校过的测量系统准确度满足战技指标即可认为标校合格,并不是无限度地追求更高的测量准确度指标。 4.2.1标校数据获取方法的对比 针对同一型号的地空制导武器系统的测量准确度标校,曾采用差分GPS、光电经纬仪及后来的弹目合一的方式进行执行校飞试验标校数据获取。以弹目合一方式的单次校飞试验成本为基数1,对比其他3种方法下的单次校飞试验成本情况,如表3所示。 表3 不同方法下单次校飞试验成本 单次校飞试验成本绝大部分在于靶机配合飞行上,此外还有测量仪器的使用成本。目前,光电经纬仪是一种大型光电目标跟踪测量系统,成本相对于双差分GPS使用成本较高。此外,ADS-B系统可以获取任意航线上客机的四维位置信息(经度、纬度、高度和时间),实际上以民航客机为靶机,无需专门进行靶机配合飞行,试验成本仅仅是地空制导武器系统开机功率能量的损耗,几乎省去90%以上的校飞试验成本,但仅适用于试制单位自行进行的原理性摸底实验。虽然名义上校飞试验成本最低,但试验结果也无法得到军方认可。因此,在设计定型实验汇中弹目合一的方法无需额外测量系统,实际上的校飞试验成本最低。 4.2.2异常数据处理方法的对比 对于同样的若干组标校数据采用固定阈值判决,卡尔曼滤波(选若定某一步长)及文中提出异常值处理方法,对比不同方法下的相同标校数据利用率情况(见表4)。标校数据利用率越低,则意味着需要补充额外校飞架次则越高。 表4 不同方法下标校数据利用率 之前同型号地空制导武器系统准确度标校时,通常采用的是固定阈值判决方法以剔除野值,可以获得较高质量的标校数据,即形成较好的高斯概率分布曲线。但视为作废数据从而丢弃的情况较多,需要加大校飞试验架次以补充有效的标校数据。以某一步长的卡尔曼滤波方法,可以获得的标校数据质量相对较差,仍需要加大校飞试验架次以补充有效的标校数据。采用本文所提出的异常值数据处理方式后,额外的补充校飞试验架次将减少近40%。 由对比情况可知,采用文中提出测量准确度标校方法后,不但使单次校飞试验成本有效降低,也减少了额外补充校飞架次。因此,提高了无线电指令的地空制导武器系统校飞试验效率,压缩了试验周期,也节约了试验成本。 本文提出弹目合一的校飞试验结合标校数据异常值处理相结合的方法。经过多元方差分析论证了标校数据获取方法是可行的,且标校设备组成简单,降低了单次校飞试验成本。采用滑窗形式检测器与偏度-峰度检测法分别对数据中斑点型与孤立型野值进行有效剔除,保证了系统测量准确度标校的有效处理时,提高了标校数据的利用率,减少了额外的补充校飞试验架次。今后的研究方向将放在如何处理非正态分布校正采样数据的野值处理的研究中。
3.3 标校数据处理方法可行性分析
4 标校数据处理后的效果
4.1 处理后的数据概率分布
4.2 标校方法实施情况对比


5 结论
