基于滑模控制算法和模糊逻辑的四旋翼飞行器控制器设计
2022-12-12朱伟
朱 伟
(西安明德理工学院智能制造与控制技术学院, 陕西 西安 710124)
四旋翼飞行器由于体积小、质量轻[1],在民用和军事应用领域得到广泛应用,如航空摄影、监视、救援任务和对危险地区的勘探[2]。此外,四旋翼飞行器在新兴的研究领域也有很大的应用价值,如在环境科学领域,四旋翼飞行器可被用来研究气候变化、冰川动力学行为、火山活动等。
为实现四旋翼飞行器的鲁棒和抗干扰控制,提升控制性能,主要需解决两个问题:轨迹调节(定位)[3]和轨迹跟踪问题[4]。轨迹调节问题是四旋翼飞行器的飞行轨迹在其稳态控制下渐近达到一个期望收敛位置的问题。轨迹跟踪问题是四旋翼飞行器的飞行轨迹在稳态时尽可能接近给定期望轨迹的问题[5]。模糊控制算法是解决四旋翼飞行器轨迹调节(定位)和轨迹跟踪问题的常用方法之一[6]。文献[7]提出了一种基于干扰观测器的四旋翼飞行器姿态运动系统最优滑模控制方法,结果表明,所设计的控制器对不匹配干扰具有较强的鲁棒性。文献[8]提出基于离散滑模控制的四旋翼飞行器轨迹跟踪控制系统,该系统具有良好的大角度轨迹跟踪性能。文献[9]提出一种滑模自适应鲁棒控制算法,该算法能够很好地实现对四旋翼飞行器既定轨迹的跟踪控制并可保证精度。由于滑模控制的控制律中不连续符号函数的存在,控制信号收敛时将发生颤振,即当滑动面为正时,使用滑模控制得到一个控制律,当滑动面为负时得到另一个控制律。为消除四旋翼飞行器轨迹定位和跟踪的控制信号收敛时发生的持续颤振,本文设计了一种基于滑模控制算法和模糊逻辑的控制器。
1 四旋翼飞行器的动态模型和控制器设计
1.1 四旋翼飞行器的动态模型
四旋翼飞行器质心的绝对位置由空间笛卡尔坐标(x,y,z)给出,x,y,z分别为四旋翼飞行器所在位置的X,Y,Z轴坐标值。方向由欧拉角给出:φ为俯仰角,即四旋翼飞行器绕x轴旋转的角度;θ为翻滚角,即四旋翼飞行器绕y轴旋转的角度;ψ为偏航角,即四旋翼飞行器绕z轴旋转的角度。系统输入由以下方程描述:
(1)

为实现四旋翼飞行器水平面(x,y)的运动控制,需定义两个虚拟控制输入(ux和uy),使飞行器在X,Y,Z轴上的位置分别通过控制信号ux,uy和u1来实现。因此,四旋翼飞行器平移和旋转运动的动力学方程可写为包括虚拟控制输入的函数:
(2)
(3)

式(2)和式(3)的运动方程代表了具有6个自由度和6个输入的四旋翼飞行器的动态模型。定义状态向量x和输入向量u:
(4)
方程式(2)和式(3)可以用以下非线性状态方程表示:

(5)
式中:h(x)=[x,y,z,φ,θ,ψ]T,为输出向量;η为加性高斯白噪声向量;y为输出变量矩阵;f和g均表示变量x的函数。
1.2 四旋翼飞行器控制器设计
为解决四旋翼飞行器的轨迹调节(定位)和跟踪问题,设计一种基于滑模控制算法和模糊逻辑的控制器(C-FSMCA),该控制器具有双环层次控制体系结构,其闭环控制系统示意图如图1所示。

图1 闭环控制系统示意图


图2给出了滑动面变化范围与隶属度之间的关系曲线。图中曲线分为两部分,一部分表示正滑动面,另一部分表示负滑动面。为消除模糊控制中产生的颤振,引入基于Takagi-Sugeno推理方法的模糊逻辑方法。

图2 滑动面变化范围与隶属度之间的关系曲线

需要注意的是,消除颤振的算法是针对每个控制律执行的,这种方法称为模糊滑模控制方法,该方法保持了滑模控制的鲁棒性,并通过逐步控制信号的变化消除颤振效应。
2 仿真研究与结果分析
为验证所提控制器的有效性,通过仿真实验将C-FSMCA与指数型时变增益趋近反步滑模算法抗干扰控制器(C-BSMA)[7]对四旋翼飞行器轨迹调节和跟踪的效果进行对比分析。
2.1 轨迹调节(定位)
轨迹调节(定位)问题是飞行器在欧几里得空间中所需位置和方向的定位问题。在仿真中,考虑传感器测量过程中存在的加性高斯白噪声,这些噪声被卡尔曼滤波器衰减。在时间t=15 s且C-FSMCA所使用的增益系数为(λz,Kz)=(0.6,4.0)、(λx,Kx)=(0.6,0.5)、(λy,Ky)=(0.6,0.5)、(λφ,Kφ)=(10,10)、(λθ,Kθ)=(10,10)和(λψ,Kψ)=(0.6,4.0)时,考虑外部垂直扰动力(d1=5 N·m,d2=d3=1.5 N·m,d4=1 N·m)对飞行器的控制输入的影响。
四旋翼飞行器相对于恒定参考信号的绝对空间位置、飞行方向角随时间变化情况分别如图3和图4所示。

图3 绝对空间位置调节控制的时间响应比较

图4 飞行方向角调节控制的时间响应比较
由图3可知,使用两种控制器的飞行器初始绝对空间位置坐标均为(x0,y0,z0)=(-3,3,1),并渐近收敛到所需收敛位置(x*,y*,z*)=(0,0,4),无超脉冲,在7 s—15 s无过压。在15 s时发生颤振,使用C-BSMA的飞行器绝对位置发生明显颤振,而使用C-FSMCA的飞行器绝对位置颤振轻微,并很快恢复正常。在30 s时对收敛位置进行调整,新的收敛位置调整为:(x*,y*,z*)=(-2,2,2),使用两种控制器的飞行器在8 s(在22 s—30 s)的时间内均到达新收敛位置。
由图4可知,(φ,θ,ψ)随时间变化情况由内部控制器控制,其收敛值为(φ,θ,ψ)=(0°,0°,0°)。四旋翼飞行器的初始飞行方向角为(0°,0°,45°),并在大约5 s的时间内渐近收敛于所需方向角(0°,0°,0°)。当在15 s和30 s控制信号发生颤振时,使用C-BSMA的飞行器飞行方向发生明显颤振,而使用C-FSMCA的飞行器飞行方向颤振轻微,并很快恢复平稳飞行。
图5给出了两种控制器的控制信号对比。当在15 s和30 s控制信号发生颤振时,使用C-BSMA的飞行器控制信号发生明显颤振,而使用C-FSMCA的飞行器控制信号颤振轻微,并很快恢复平稳飞行。
图3、图4和图5的对比结果表明,相比于C-BSMA,C-FSMCA的绝对位置状态变量、飞行方向角更加平滑,连续性更好,这保证了其消除颤振的有效性。
为对比两种控制器对四旋翼飞行器的控制效果,采用常用的误差性能指标——二次误差积分(integral of quadratic error,IQE)、绝对误差积分(integral of absolute error,IAE)和均方误差(error of mean square,EMS)对两种控制器进行了对比分析。
表1给出了C-FSMCA和C-BSMA的误差性能指标。

图5 控制信号调节控制的时间响应比较
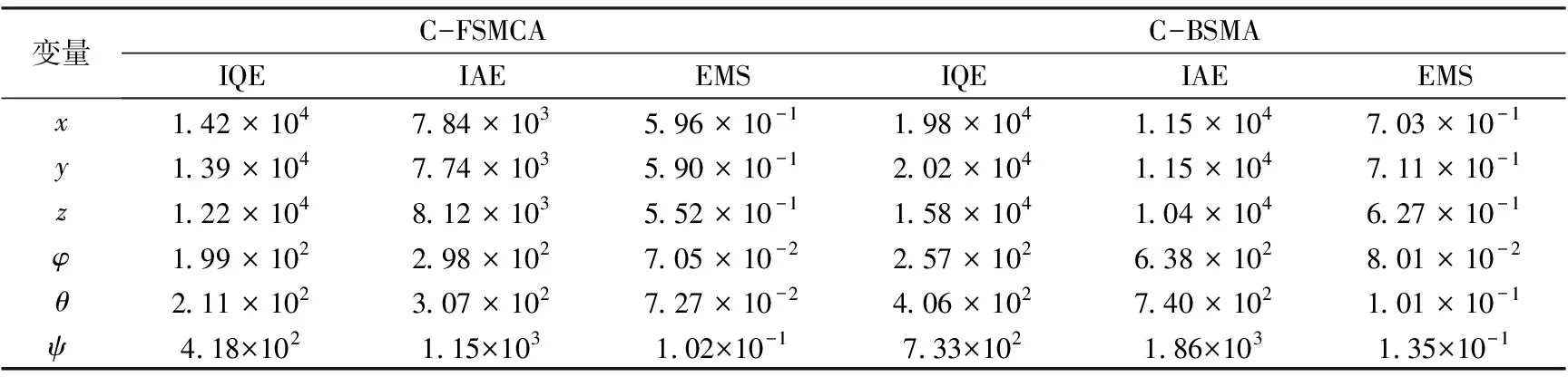
表1 C-FSMCA和C-BSMA的误差性能指标
由表1可知,C-FSMCA在每个变量上的误差都比C-BSMA小,这在其对快速衰减扰动的瞬态动力学响应曲线上得到了图形化的反映,如图4和图5所示。例如,C-FSMCA对x,y,z,φ,θ和ψ的二次误差积分仅为C-BSMA的71.7%、68.8%、77.2%、77.4%、52.0%和57.0%。
2.2 轨迹跟踪控制
为满足设计要求,除解决四旋翼飞行器的轨迹调节问题,还需解决其轨迹跟踪问题。四旋翼飞行器从初始位置(x0,y0,z0)=(1,0,0)出发,目标是跟随所需的轨迹到达目标位置。图6和图7分别显示了四旋翼飞行器的绝对位置和飞行方向轨迹跟踪的时间响应。
轨迹跟踪使用的增益系数仍然为(λz,Kz)=(0.6,4.0)、(λx,Kx)=(0.6,0.5)、(λy,Ky)=(0.6,0.5)、(λφ,Kφ)=(10,10)、(λθ,Kθ)=(10,10)和(λψ,Kψ)=(0.6,4.0)。通过跟踪弯曲路径(期望路径)来验证所提出的控制器的有效性。根据绝对位置坐标(x*,y*,z*)规划所需路径,如图6所示。期望飞行器的飞行路径始终满足仰角ψ*=0°,另外倾斜角(φ*)和滚动角(θ*)由位于外部控制回路的定位控制器提供。
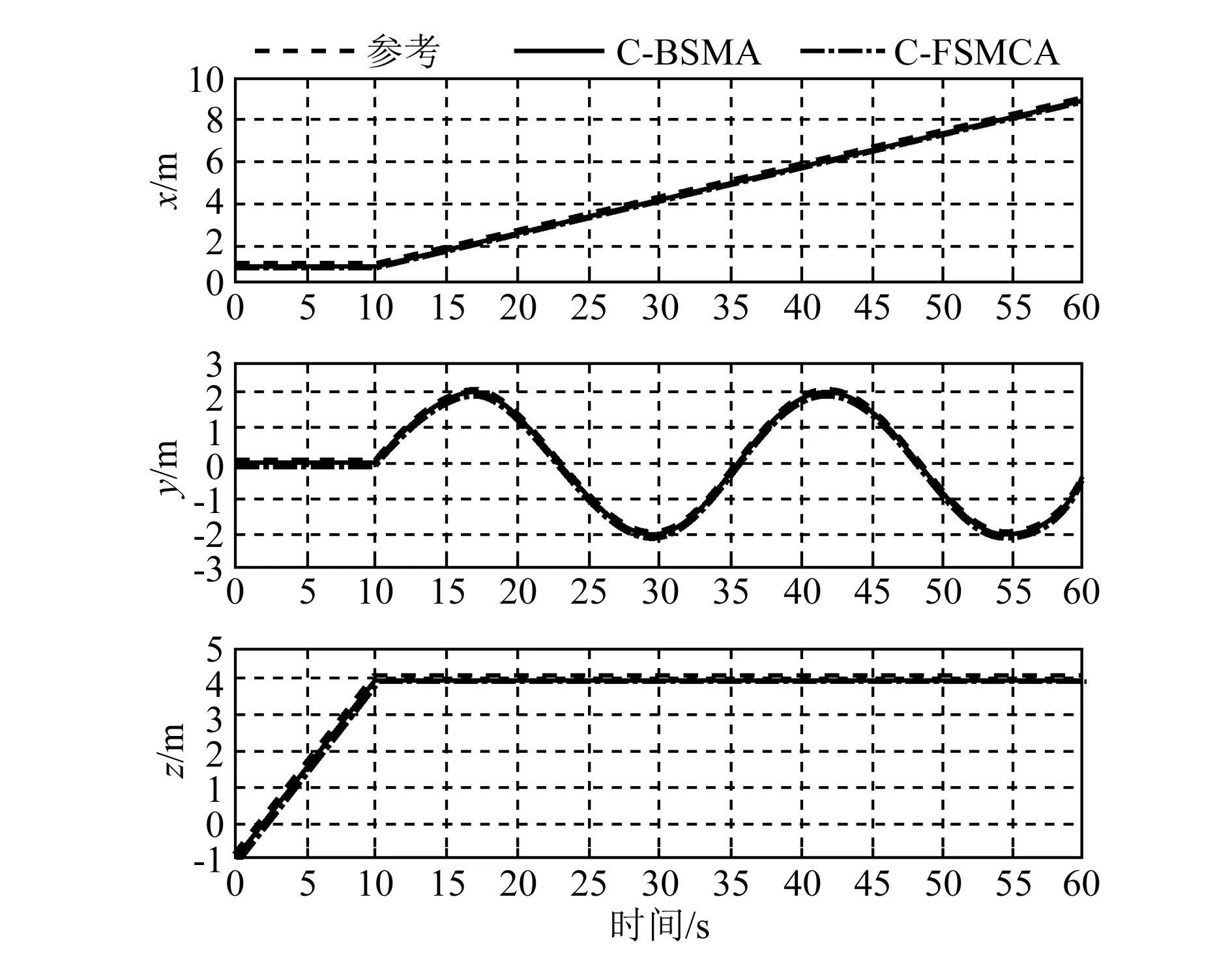
图6 绝对位置轨迹跟踪的时间响应比较
由图6和7可知,两种控制器均能控制四旋翼飞行器按照指定的绝对位置轨迹和飞行方向轨迹飞行。在图8中,四旋翼飞行器遵循所提出的弯曲路径飞行,参考路径采用C-BSMA的飞行器飞行路径和采用C-FSMCA的飞行器飞行路径完全重合;图6、图7和图8的实验结果验证了C-FSMCA和C-BSMA均能很好地实现目标跟踪控制,但如2.1节所述,C-FSMCA的鲁棒性优于C-BSMA。
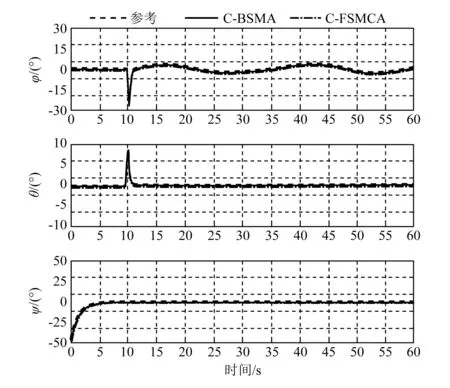
图7 飞行方向轨迹跟踪的时间响应比较

图8 四旋翼飞行器对弯曲路径的轨迹跟踪
3 结束语
本文设计了基于滑模控制算法和模糊逻辑的四旋翼飞行器轨迹调节和跟踪控制器,该控制器具有双环分层系统结构,通过将滑模控制算法与模糊逻辑结合,有效消除了控制信号收敛时发生的持续颤振。通过对四旋翼飞行器的仿真实验验证了所设计非线性控制器的有效性。实验结果表明,即使在外部干扰存在的情况下,所设计控制器也能够有效控制四旋翼飞行器遵循预期的轨迹到达预期的位置。为定量评估所设计控制器的有效性,采用二次误差积分、绝对误差积分和均方误差等误差性能指标对其进行了性能分析;分析结果表明,所设计的控制器对四旋翼飞行器的控制效果优于指数型时变增益趋近反步滑模抗干扰控制器。
