废液桶搬运机器人升降机构设计与仿真分析
2022-12-12许承承周骥平安华成朱勉顺徐钟林
许承承,周骥平,2,安华成,朱勉顺,徐钟林
(1.扬州大学机械工程学院,江苏 扬州 225127)(2.扬州大学实验室环保与智能装备研究所,江苏 扬州 225127)(3.江苏科仕达实验室环保科技有限公司,江苏 扬州 225127)
实验室是支撑教学与科研的重要保障设施,在开展相关教学与科研实验之后,会产生一定量的实验废液、废水等污染物,这些污染物必须经过专门处理后方可排出[1]。目前废液桶多以人工搬运为主,但人工搬运效率低、劳动强度大,另外废液的跑冒滴漏会对人体和环境造成危害,故需要一种能够解决废液桶转运的搬运设备,来辅助完成废液桶的夹取、搬运和倾倒等作业[2-3]。
1 搬运机器人总体设计
本文根据实际需求对搬运机器人进行功能分解,废液搬运机器人要实现的功能为:满足高度在1 000 mm以下厢式货车的装卸,通过抽吸泵,将废液排放到统一处理处进行废液处理。
通过对搬运机器人上述功能的分析,采用模块化设计方案并结合废液桶搬运需求,将其分解为升降机构、伸缩机构、夹取机构和抽吸装置(抽吸装置内置在控制柜中)等几个部分,并利用SolidWorks进行三维建模和装配,如图1所示。
2 升降机构理论分析
升降机构在搬运过程中起着重要的作用,也是关键的受力单元,其结构设计对废液储运过程有很大影响[4]。搬运机器人升降机构采用两副剪叉,每副剪叉由两级剪叉臂组成,前后对称分布,由一个液压缸驱动,其力学分析简图如图2所示。假设剪叉臂AF与X轴的夹角为α,对升降机构进行分析。
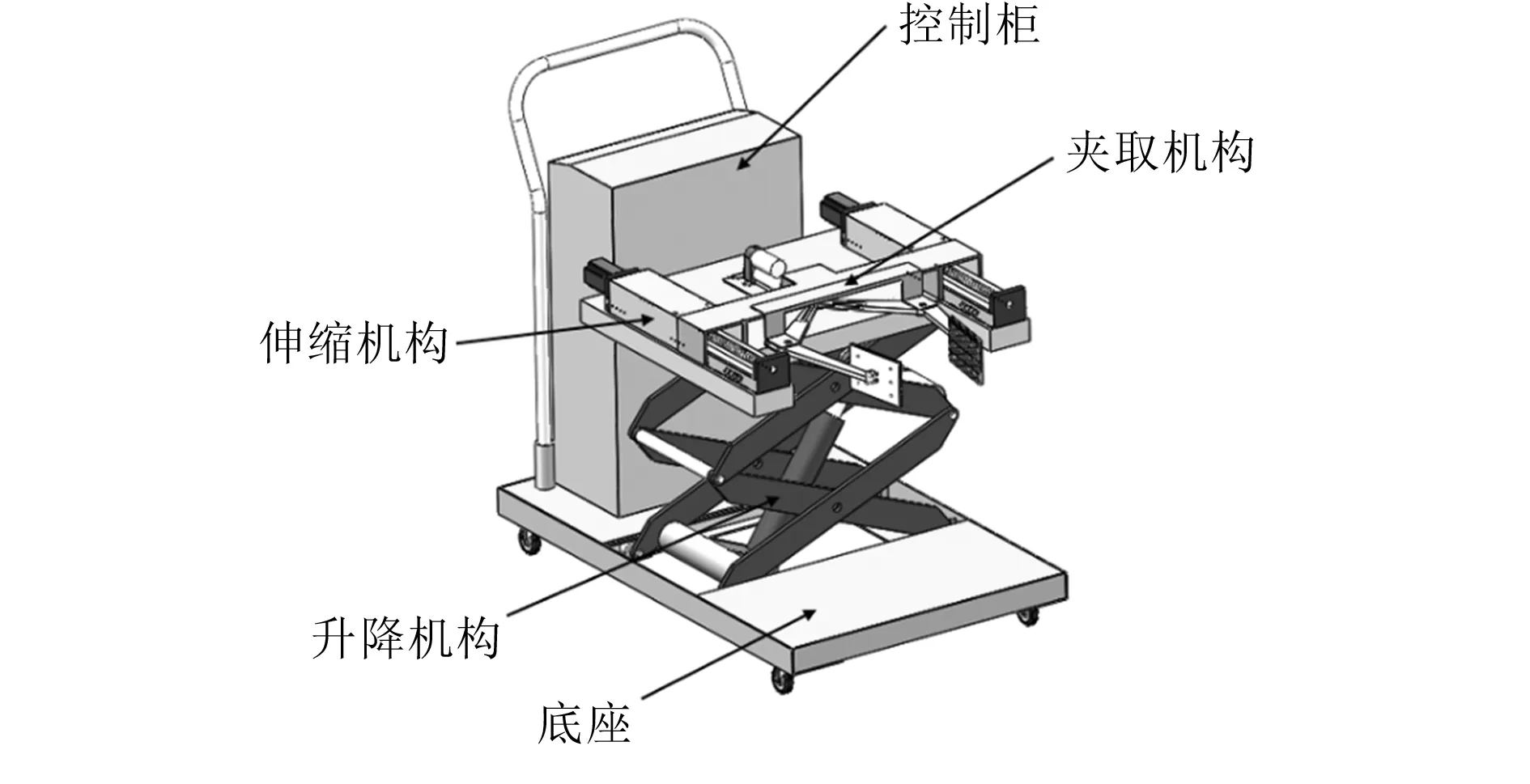
图1 搬运机器人三维模型
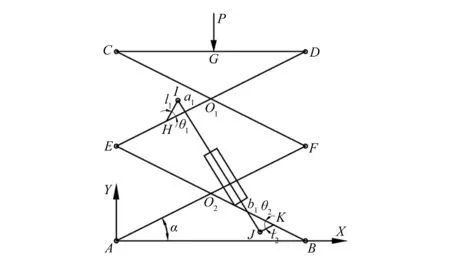
图2 剪叉式升降机构力学分析简图
设剪叉臂两销轴孔之间的距离为L,与液压缸推杆铰接的上支耳为HI,长度为l1;下支耳为JK,长度为l2。剪叉臂中间铰接点O1到上支耳与剪叉臂连接轴的焊接点H的距离为a1,相对应的,下支耳焊接点K到铰接点O2的距离为b1。分析可知,液压缸的推力作用在点I、J处。下面依据虚功原理,推导液压缸满足条件的推力F函数表达式。
剪叉式升降机构上下支耳销轴孔分别为点I、J,升降机构上平面重心为点G,点G在Y轴方向的坐标为:
(1)
式中:δα为质点的虚位移。
点I处的虚位移为:
(2)
(3)
点J处的虚位移为:
(4)
(5)
点G处的虚位移为:
δ(2)G(2)y=2Lδαcosα
(6)
为了直观表述,对非常小的位移进行放大,且可认为力的方向不发生改变,并假设力与位移的夹角为λ1和λ2,具体见液压杆运动关系简图(图3)。
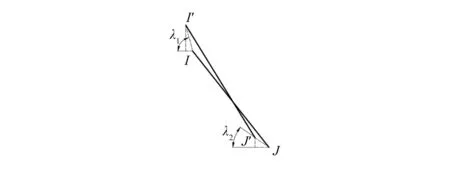
图3 液压杆运动关系简图
根据虚功原理可知,作用在某质点系的主动力在任何虚位移中所做的虚功之和为0,从而得到液压缸推力F为:
F=(P·δ(2)G(2)y)/(cosλ1·δ(2)Ix+sinλ1·δ(2)Iy-cosλ2·δ(2)Jx-sinλ2·δ(2)Jy)
(7)
式中:P为升降机构单侧总负载。
由式(2)~式(7)可知,液压缸的推力F与P,l1,l2,a1,b1以及α有关,即在P确定的情况下,推力F的大小由液压缸的安装位置和起升高度决定。
3 升降机构优化及设计参数确定
升降机构剪叉的受力主要来源于负载和液压缸的推力,因此液压缸的推力对整个升降机构的设计起着主要作用[5-6]。由于液压缸的推力受液压缸的安装位置和起升高度的影响,因此液压缸安装位置的优化对减小液压缸推力和整机优化有着重要作用[7]。
3.1 优化模型建立
以液压缸推力F最小为目标函数,利用MATLAB的局部优化函数fmincon优化液压缸在升降机构中的铰接位置,将a1,b1,l1,l24个参数作为设计变量,即设计变量为X=[a1b1l1l2]。在实际起升过程中,a1和b1的取值受到液压缸的安装方式和升降高度的影响,l1和l2受平台和整车底座的限制。分析模型结构尺寸可知,在不发生干涉且达到起升高度要求的情况下,需满足以下约束条件:0 mm≤a1≤300 mm,0 mm≤b1≤300 mm,0 mm≤l1≤130 mm,0 mm≤l2≤130 mm,则线性约束条件为lb=[0 0 0 0],ub=[300 300 130 130]。由液压缸的结构得到最小安装尺寸为650 mm,由前述分析可知液压缸长度IJ为:
(8)
式中:ΔX,ΔY分别为点I,J在X,Y轴方向的虚位移变化量。取L=650 mm,则非线性约束函数C(X)为:
C(X)=650-|IJ|
(9)
根据虚位移原理,以液压缸推力F作为目标函数,运用MATLAB中有局部优化功能的函数fmincon对升降机构液压缸的安装位置进行优化。fmincon函数输入的参数语法格式为:
X=fmincon(fun,X0,A,b,Aeq,beq,lb,ub,
nonlcon,options)
式中:X为返回值;fun为目标函数;X0为初始值;A,b,Aeq,beq为线性约束;lb和ub为设计变量边界约束;nonlcon为非线性向量函数约束;options用于定义优化参数。
3.2 优化结果与分析
给定初始值X0=[300 300 130 130],利用fmincon函数求出最优解的部分MATLAB程序如下:
X0=[300 300 130 130];
Options=optimset(′Largescale′,′off',′display′,′iter′);
[x,fval,exitflag]=fmincon(@F,x0,[],[],[],[],[0 0 0 0],[300 300 130 130],nonlcon,options)
计算结果如下:
X=[280.9200 240.5747 117.2672 110.3493]
fval=1.2046E+03
exitflag=1
从分析结果可以得出,exitflag=1说明优化结果正确且收敛得到了最优解。优化前后结果对比见表1。

表1 优化前后结果对比 单位:mm
按照优化后的参数,利用MATLAB重新进行数学建模,得到优化前后升降平台处于不同高度时的液压缸推力,如图4所示。
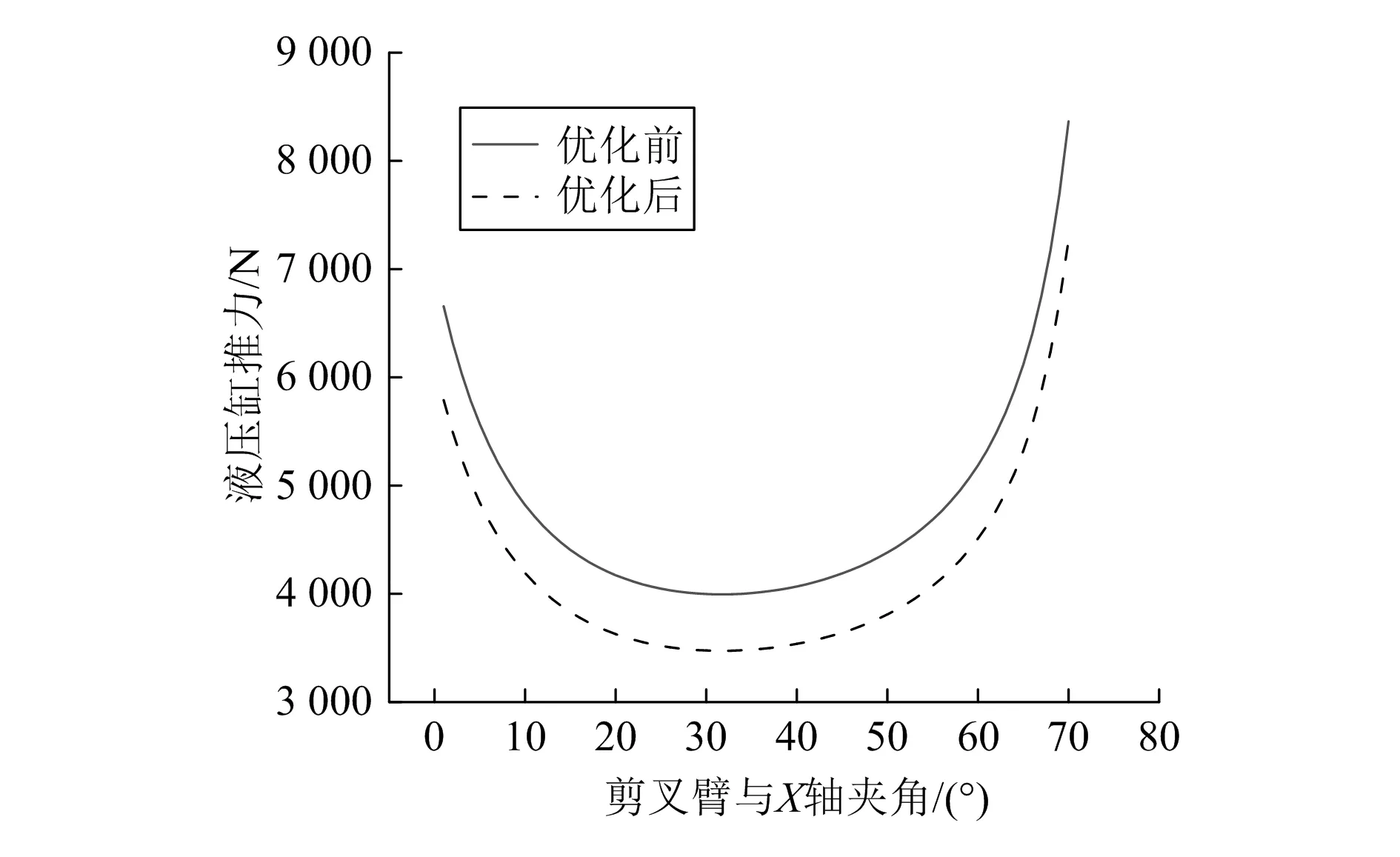
图4 液压缸优化前后推力对比图
由图可知,优化前后液压缸推力变化趋势基本保持一致,当剪叉臂与X轴夹角为60°时,优化后推力约减少700 N,比例约为13.46%,优化还减轻了升降系统的整机质量。
4 升降机构动力学仿真分析
4.1 ADAMS仿真模型建立
根据优化后的升降机构设计参数,利用SolidWorks对升降机构重新建模,简化一些小零件后另存为.x_t文件并将其导入ADAMS中[8],如图5所示。由于升降机构有上下升降的特性,在导入ADAMS前应调整好装配的初始位置,以便减少后续的调整[9]。本次仿真设置升降机构完全举升至最高点时为初始位置。
根据实际工况可知,升降平台相对底座的距离变化范围为0~850 mm,平台载重100 kg,升降时间为24 s。为了使仿真与真实工况相似,对导入的模型根据实际情况添加材料、约束和载荷,然后对液压缸与推杆之间的移动副施加速度驱动,驱动函数的表达式为step(time,0,0,1,-25)+step(time,9,0,10,25)+step(time,14,0,15,25)+step(time,23,0,24,-25)。前处理完成后,利用ADAMS对升降机构进行模拟仿真。
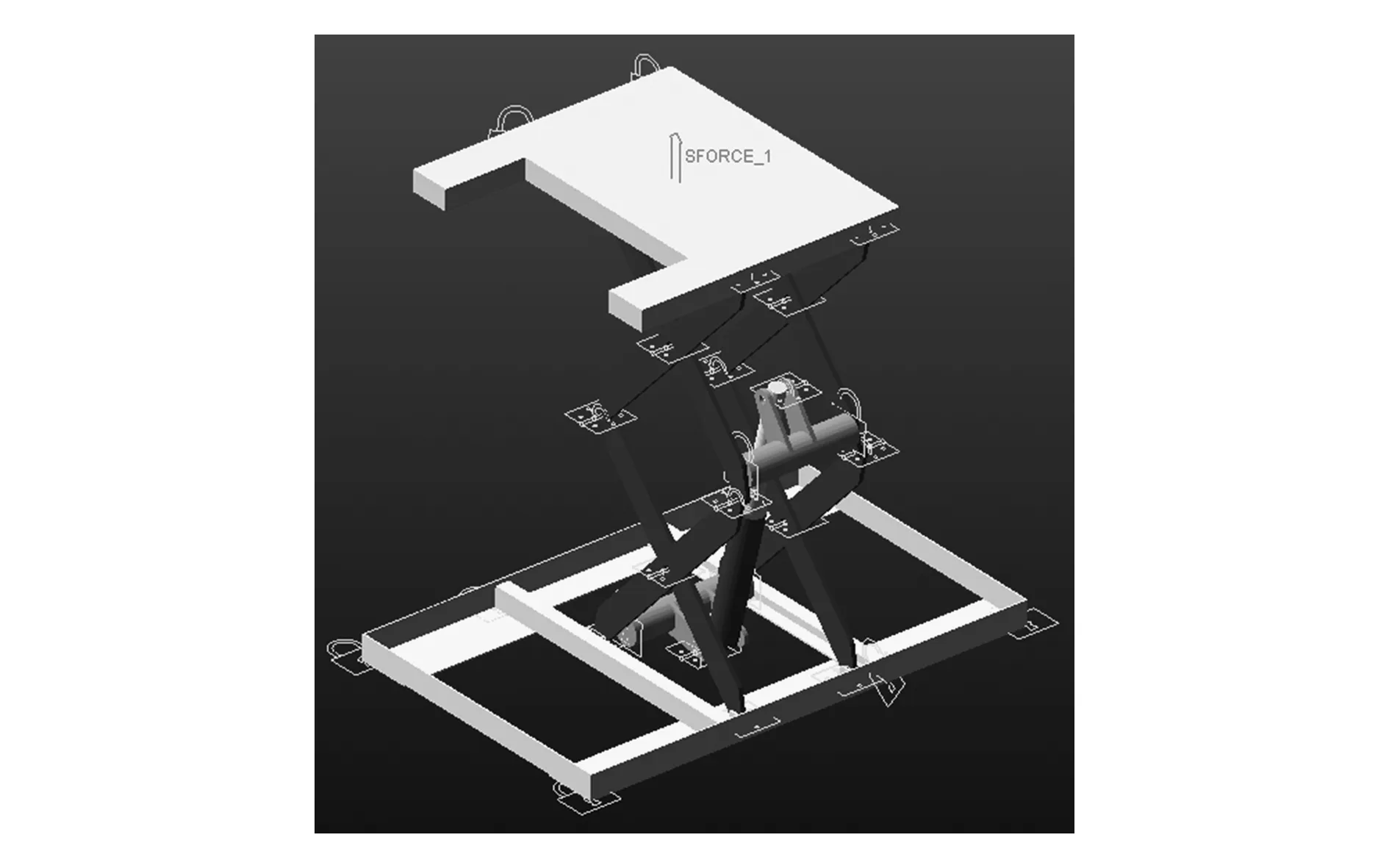
图5 ADAMS中升降机构动力学仿真模型
4.2 结果分析
仿真完成后得到后处理曲线,图6、图7分别为升降机构上平台Y方向质心位移和速度曲线。

图6 升降平台Y方向质心位移曲线
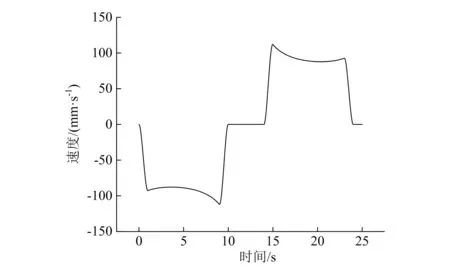
图7 升降平台Y方向质心速度曲线
由于升降机构的初始位置为升降平台处于最高位置,通过仿真结果可以看出,升降平台在0 s—9 s为下降过程,前1 s为加速下降,1 s—9 s平台Y方向速度曲线基本保持平稳,为匀速下降过程;9 s—10 s为制动过程;10 s—14 s为停止过程,平台Y方向位移和速度曲线都基本保持不变;14 s—15 s升降平台加速上升;15 s—23 s为匀速上升阶段;23 s—25 s平台Y方向位移逐渐趋于0并保持平稳。由位移曲线可知,平台最大升降高度为850 mm。由速度曲线可知,平台最大升降速度约为110 mm/s,在升降过程中升降机构都存在轻微的波动,出现这种小幅度波动的原因是由于力矩不平衡所导致的轻微晃动[10]。
由上述仿真分析可知,平台升降全过程时间为24 s,其中上升和下降过程各为8 s。升降过程推力变化曲线如图8所示,升降平台在下降过程中,液压缸的推力先减小后逐渐增大;到达最低位置时,推力达到最大,约为48 kN。
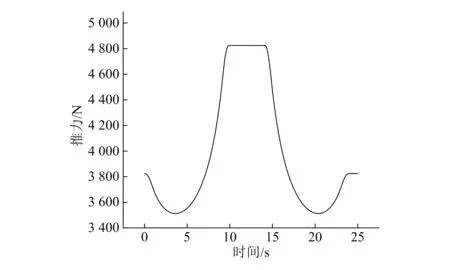
图8 升降平台升降过程推力变化曲线
5 结束语
本文针对实验室废液桶储运的搬运机器人的剪叉式升降机构进行了理论分析与仿真分析,对剪叉式升降机的设计具有一定的指导作用。由于条件限制,文中所涉及的参数优化没有试验或实物模型的验证支持,仅在仿真层面进行了相关理论研究,因此具有一定的局限性。后续可与企业联合,进行相关试验验证与改进,进一步完善相关理论。
