变电站巡检机器人无线充电技术研究
2022-11-21陈丽霞
陈丽霞,林 杰,张 焰,卢 海,吴 炅,徐 研,胡 燃
(广东电网有限责任公司广州供电局输电管理一所,广东 广州 510000)
0 引言
随着智能化建设的持续推进,目前我国变电站采用巡检机器人进行日常巡检工作已经相对普及。巡检机器人充电技术主要包括接触式充电和无线充电两种方式。由于接触式充电需要利用特定轨道,并配备专门的充电室,设计方面要求精度较高,控制复杂度较大,机器人巡检和充电过程,造成时间浪费,效率不高;且充电过程容易造成充电插头磨损,导致充电接触不良等故障率较高;另外,阴雨等特殊天气,很容易造成漏电、触电等事故。所以,目前应用较多的为无线充电模式。无线充电模式主要利用无线电能传输原理对巡检机器人实施充电。巡检机器人通过自身携带的电池监控装置,对自身电压进行监控,一旦电压低于触发报警阀值时,巡检机器人根据自带无线充电信号源寻找装置,自动寻找巡检路径中最近无线充电源进行无线充电。无线充电方式由于定位准确,系统充电可靠性较高,充电时间快,且无充电虚接、漏电情况,设备利用效率高,具有很好的灵活性和实用性[1]。
1 无线充电分类及特点
变电站巡检机器人无线充电从技术原理和电能模式上主要包括光伏充电、长导轨式和分段式无线充电技术。光伏充电技术主要是在机器人巡检路径中建立多个光伏充电点,将光能转化为电能,在巡检过程实时对巡检机器人进行电力补充,其特点在于设计成本低,环保经济实惠;缺点在于需要在巡检机器人内部进行光伏电能转换设计,且阴雨天气或夜晚无法进行充电。长导轨式无线充电技术在设计方面具有优势,仅需在巡检机器人底部加装无线接收线圈;但是这种充电方式需要全程铺设巡检路径无线发射轨道,投资较大。分段式无线充电技术相对简便,无需全程铺设专用充电轨道,其原理主要是在几个固定巡检路径点埋设充电发射分离线圈装置,按照巡检机器人电量控制装置进行轮流导通充电,减小了发射线圈的内阻损耗和电磁辐射,经济实用,充电效率高。分段式无线充电原理图如图1所示。

图1 变电站巡检机器人分段式无线充电原理图
根据巡检机器人充电状态,巡检机器人无线充电又可以分为静态无线充电和动态无线充电两种模式,根据变电站巡检机器人巡视路径较为固定的特点,结合无线红外静止检测需要,采用分段式静止无线充电技术相对简洁高效,其特点在于提前计算好巡检机器人在两个巡检点的不间断巡检行走、红外测温、可见光测试、导航等电量消耗情况。设计安装小容量锂电池,可实现巡检机器人不间断工作,巡检效率较高。动态无线充电技术应用较广,目前在高铁、电动汽车等方面相对成熟,其电能变换安全、稳定、准确、可靠性较高。
根据发射及接收充电线圈结构和电能传输特点,无线充电技术主要有电磁感应模式、磁祸合谐振模式和微波模式。电磁感应充电模式传输效率一般在90%以上,其传输距离只有十几厘米,传输路径较短;微波充电模式由于微波有着较好的传输特性,抗干扰性强,其传输范围能够覆盖数公里,传输覆盖半径较大,但是,微波充电模式存在能量损耗大传输效率不高的弊端;而磁耦合谐振充电模式其传输距离在0.05~0.5 m区域内,能耗较低,传输距离适中,能量转换效率较高,目前应用较为广泛,磁场耦合谐振模式无线充电原理框图如图2所示。
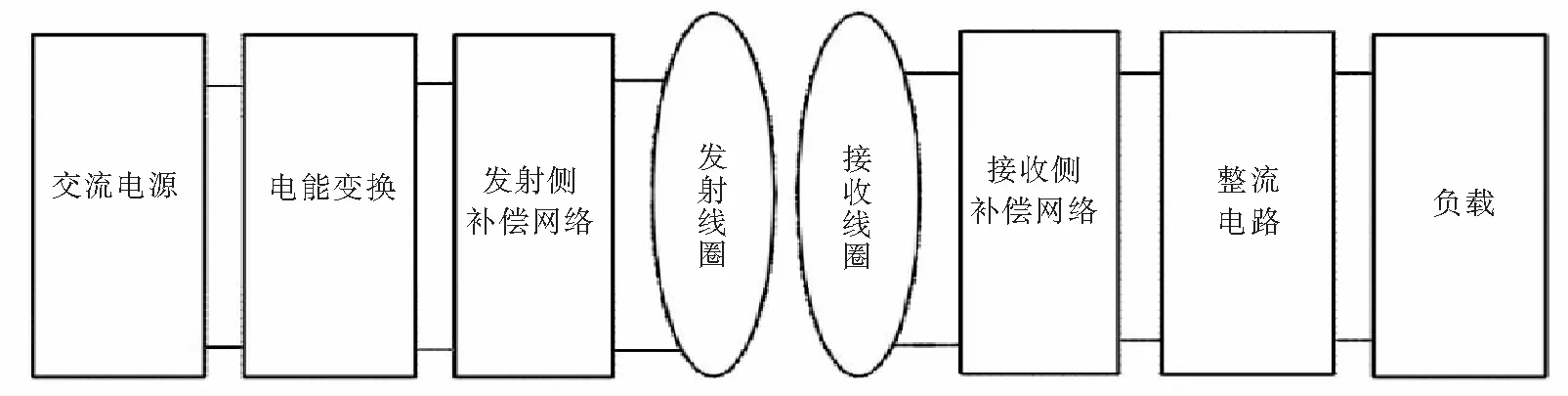
图2 磁场耦合谐振模式无线充电原理框图
2 磁耦合谐振式无线充电技术
2.1 磁耦合谐振式无线充电技术原理
磁耦合谐振式无线充电技术电能传输(Magnetic coupling resonance wireless powertransmission,MCR-WPT)技术原理主要利用磁场变换实现能量的传递,其特点在于发射线圈和接收线圈具有相同的谐振频率,在系统工作频率下,发射、接收线圈分别与各自谐振电容发生同频谐振,实现能量传输。 图2中,MCR-WPT系统由电源电路、电能变换电路、发射(接收)补偿网络、发射线圈、接收线圈、整流电路、负载(巡检机器人)组成。电源电路主要对交流电源进行整流滤波和DC-DC直流调压。电能变换电路主要包括Buck APFC电路、高频逆变电路、DSP控制驱动电路等。系统工作原理为:工频交流电经整流滤波-Buck APFC电路调整变换为直流电压,再经高频逆变电路逆变为85kHz的高频交流电为发射线圈及补偿网络供电。发射线圈侧通过光电传感器实时采集巡检机器人位置信息后,通过逻辑数字电平信号转换后传输给DSP控制电路,DSP对巡检机器人运动轨迹、接收线圈状态等信息进行处理,通过发射、接收线圈物理位置是否在充电允许范围的判断,驱动高频交流电路使发射线圈和谐振电容发生谐振,经过一段传输距离后由相同谐振频率的接收线圈接收,再经高频整流滤波后给巡检机器人充电。DSP控制电路以采用数字高低电平转换实现对继电器的信号切换控制,从而控制电能变换电路的通断,实现充电信号的发送。实施顺序是:光电传感器监测到发射线圈和充电线圈在可传输范围内,打开发射线圈及补偿网络与电能变换电路的控制继电器,DSP电路向电能变换电路发出升压信号,实现巡检机器人充电。一旦充电完成或传输范围受限,DSP控制电路给电能变换电路发送降压信号,从而关闭继电器[2]。
2.2 磁藕合结构
巡检机器人磁耦合结构主要有矩形-圆形、矩形-矩形、圆形-矩形、圆形-圆形4种结构类型。磁耦合结构为发射线圈和接收线圈的结构总称,其起作用是把高频交流电转化为高频磁场,实现电能的高效转化和传输。无线充电系统磁耦合机构不同对电磁互感变化趋势产生重要影响,从而决定了巡检机器人无线充电系统的功率特性曲线和效率特性曲线。磁耦合仿真图如图3所示。
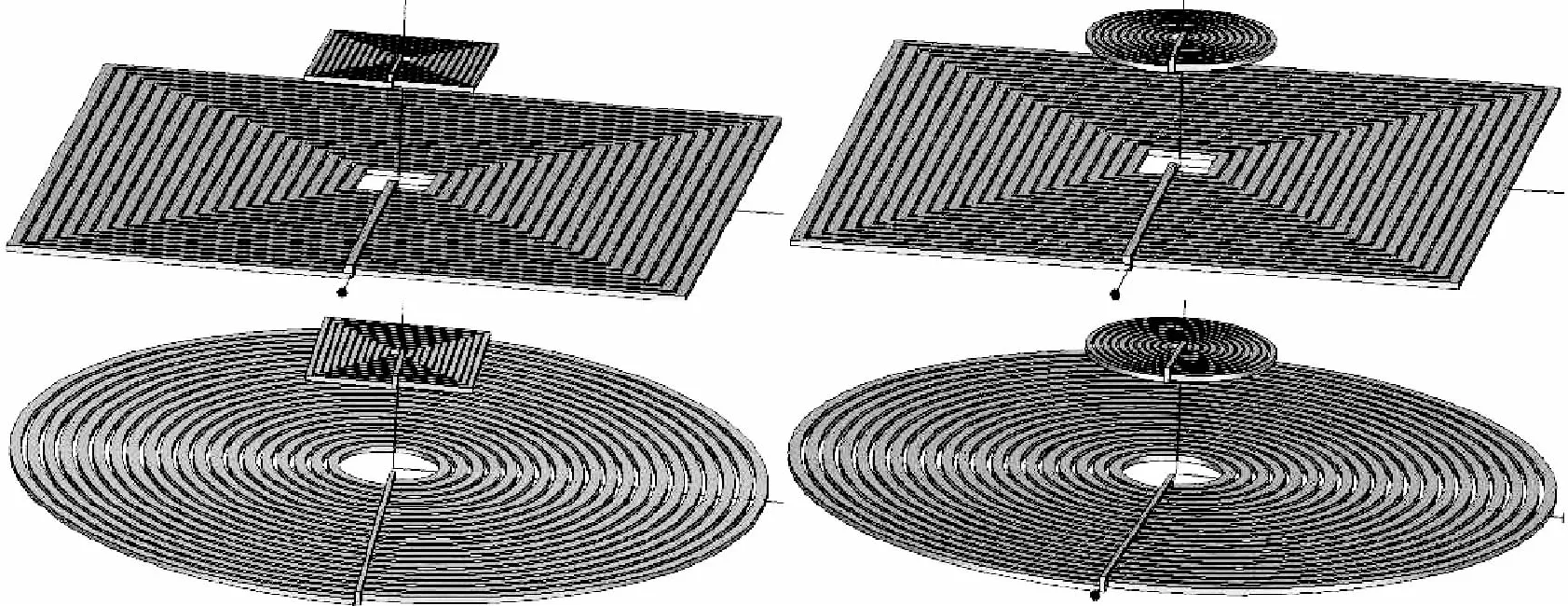
图3 无线充电磁耦合结构仿真
利用系统仿真软件ANSYS Maxwell,分别设置220 V控制输入电压,采用LLC-S电路拓扑结构,设置负载电阻值为4.85 Ω,磁耦合结构垂直距离为8 cm。进行4种磁耦合结构功率及效率仿真测试。
仿真结果表明,无线充电系统磁耦合结构发射线圈为矩形结构时,充电功率及效率曲线斜率变化较明显,充电效果较为稳定。
2.3 补偿网络
巡检机器人无线充电系统中,为了调节系统谐振频率,弱化电路中的逻辑器件电磁暂态冲击响应,提高整个系统的输出功率以及充电负载能力,需要在发射及接收电路中增加补偿网络。常用的巡检机器人无线静态充电系统采用的补偿网络类型有发射端线圈串联-接收端线圈并联(S-P)型、发射端线圈串联-接收端线圈串联(S-S)型、发射端线圈并联-接收端线圈串联(PS)型、发射端线圈并联-接收端线圈并联(PP)型4种结构[3],巡检机器人4种无线充电补偿网络结构如图4所示。
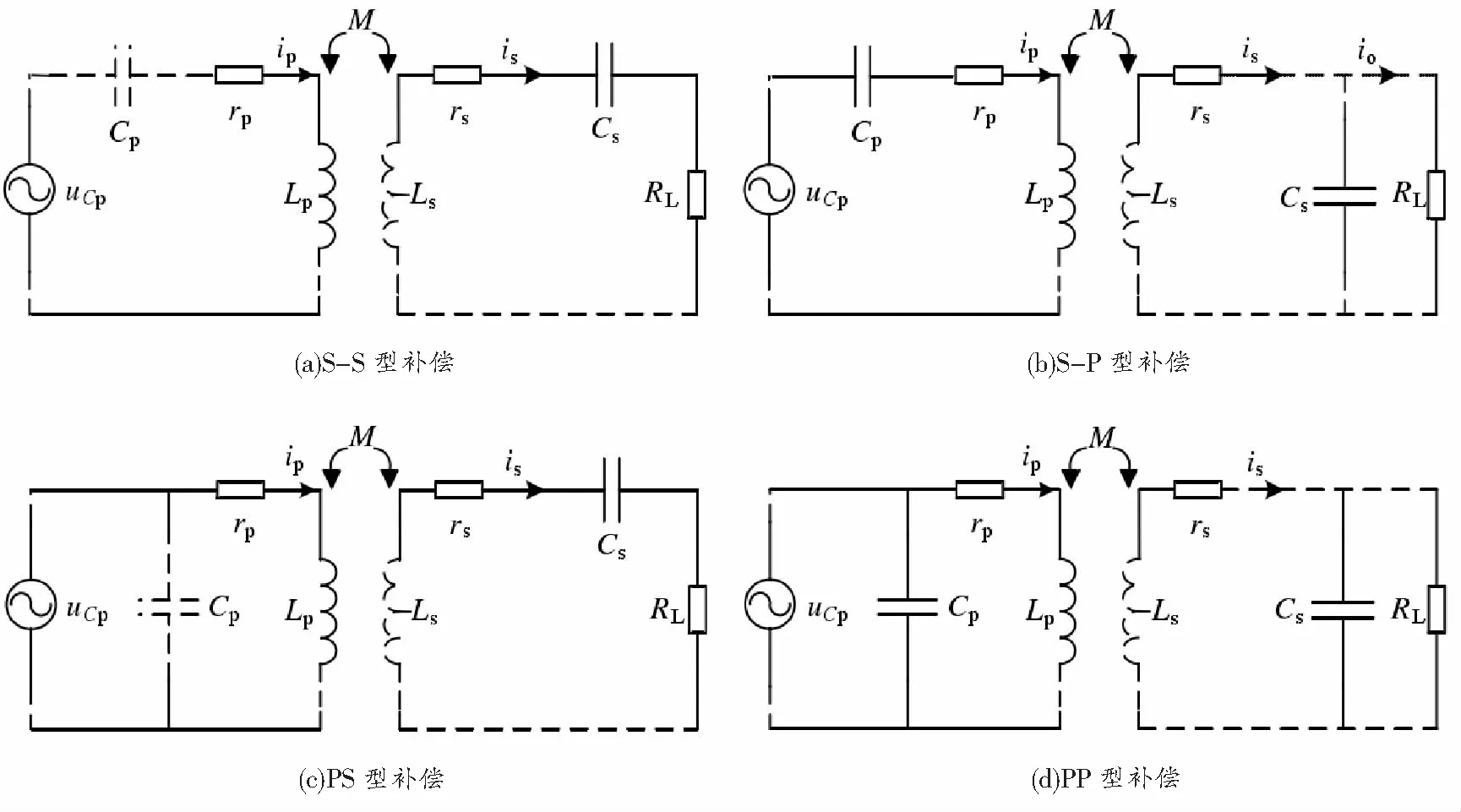
图4 巡检机器人4种无线充电补偿网络结构
图5中4种补偿网络拓扑结构较为简单,系统参数配置不高,普遍用于静态无线充电系统。近年来,动态无线充电技术趋于成熟,应用越来越广泛,动态无线充电系统对整个电路传输特性和系统稳定性要求较高,目前多采用LCC-S型补偿网络[4],其电路结构如图5所示。
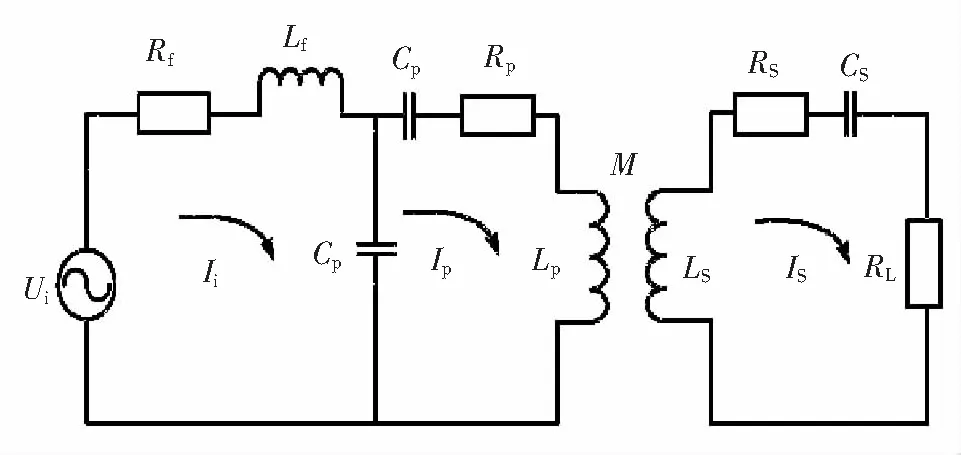
图5 LCC-S型补偿网络
图5中,Lf表示发射端补偿串联电感,Lp表示发射端并联补偿电感,Cf表示发射端并联补偿电容,Cp表示发射端串联补偿电容,Rf、Rp分别表示发射端串联、并联补偿电阻,Ui表示发射端输入电压。RS、CS、LS对应表示接收端寄生电阻,接收端串联补偿电容和接收线圈电感,RL表示等效电路输出电阻(负载);Ii、Ip、Is分别表示输入端输入电流、发射线圈和接收线圈的谐振电流[5]。利用仿真软件对补偿电感、电容、电压进行仿真,仿真结果如图6所示。
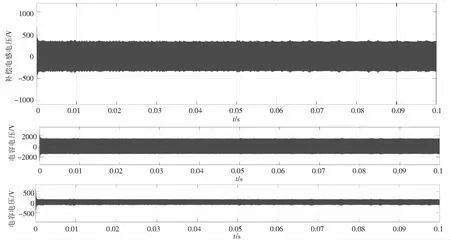
图6 补偿网络电感、电容电压仿真结果
仿真结果表明,无线充电电路系统在初始启动到系统稳态过程中,补偿网络电感冲击电压在1 000 V左右,发射端补偿电容冲击电压维持在500 V左右,接收端接收线圈电容冲击电压在2 000 V左右。
3 结语
随着变电站巡检机器人应用越来越广泛,极大地提高了巡检效率,减轻了电力职工工作强度,同时也确保了供电的安全性和稳定性。巡检机器人充电技术从有线导轨接触式充电逐渐发展为无线静态、无线动态充电模式,技术逐渐趋于成熟,充电功率和效率得到了较大的提升。由于无线充电系统较为复杂,设计过程需要充分考虑现实环境、元器件选型、容量及电压阀值、巡检路径等,在实际应用中,应确保系统的安全性、便利性和稳定性。
