一种柔性支承转子系统的地震动响应分析
2022-11-21白宇杰李诗图
白宇杰, 李诗图, 杨 璇
(1.核工业理化工程研究院,天津 300180; 2.清华大学 工程物理系,北京 100084;3.粒子输运与富集技术国防科技重点实验室,天津 300180)
某设备转子以极高的转速工作在柔性支承上,地震会导致碰摩发生,对其正常运行有严重影响。为降低地震动载荷对转子系统的破坏,在旋转机械中设计了限位器,以期通过在转子合理部位进行适度碰摩,在不破坏转子的情况下将系统恢复稳定。该设备安装在支撑框架上运行,地震载荷会通过支撑框架传导到转子系统中,设计不当的支撑框架会放大地震载荷进而影响系统的正常运行。
在一般旋转机械的地震动响应及抗震设计领域,国内外都展开了相关研究。对于转子系统的地震动响应研究起始于20世纪70年代[1]。早期的学者一般将转子与转轴视作刚体处理,Srinivasan等[2]做出开创性工作,建立柔性转子模型并利用伽辽金法求解响应;Shimogo等[3]将转子简化为集总参数系统模型,轴承简化为弹簧和阻尼模型进行分析,发现柔性转子的地震响应明显大于刚性转子的响应。Hori等[4]对支撑在油膜轴承上的Jeffcott转子系统在地震激励条件下的稳定性进行了研究,表明由于油膜力的非线性,一个原本线性稳定的转子系统可能在较强的地震冲击影响下失稳;Samali等[5-6]采用蒙特卡罗模拟方法研究了单盘转子系统在地震激励下的随机振动问题,发现地震的旋转分量对转子轴承系统绕质心的转动影响较大,对质心的平动振幅响应影响较小;Kim等[7]的研究结果表明,对复杂的转子轴承系统,蒙特卡洛法是唯一可行的方法;Gaganis等[8]将非线性系统转化为分段线性系统,研究了复杂转子轴承系统的响应和动态特性变化规律;Singh等[9]开创性地采用了地震分析方法中的反应谱法,应用于转子系统,并证明了反应谱法在转子系统地震响应分析中的可行性。
国内的类似研究相对滞后,进入21世纪才开始进行相关研究。2002年,赵岩等[10]基于精细时程积分法分析了单盘转子的地震响应,给出了转子系统随机振动分析的有效途径,但在研究中未考虑转子的不平衡量影响;随后祝长生[11]的研究指出,不平衡量的影响在转子地震响应分析中是不可以忽略的;陈拥军等[12]的研究,则是基于线性矩阵不等式,实现地震冲击下转子的主动控制,获得了较好的效果;鲁周勋等[13]率先在国内开展了转子-轴承系统对地震波激励响应的研究,建立了转子-轴承系统的有限元模型,提出了一种地震激励下转子轴承系统响应的时域分析方法,并通过地震试验模拟验证了方法的可行性;富露霞等[14]基于汽轮机转子轴承系统,建立了考虑轴系陀螺力矩和转动惯量的转子轴承系统动力学有限元模型,得到了转子轴承系统关键节点的等效应力和振幅变化趋势;毛飞等[15]对核主泵电机的抗震进行了分析,表明核主泵抗震结果与反应谱峰值和反应谱载荷的卓越频率相关;谢最伟等[16]利用Newmark数值积分法,考察了转子系统的地震冲击响应,并提出了一种复数域内转子系统冲击响应计算方法;王正浩等[17]基于精细时程积分法及虚拟激励法,研究了轴承随机激励对转子系统随机响应的影响,得出了随机激励对轴承的随机响应影响较大,而对圆盘的影响较小的结论。
通过调研发现,一般旋转机械的研究对象多种多样,包括Jeffcott转子、单盘转子、油膜轴承转子、汽轮机转子、核主泵等,不同的转子系统有着不同的地震动响应和抗震设计要求,相互之间结论难以借鉴。某设备中的转子,运行转速远高于上述转子,而且工作在柔性支承上,已有的研究成果很难直接应用。同时,支撑对于旋转机械地震动响应的影响方面研究很少,仅发现Rao等[18]研究了支撑刚度对风扇-电机转子-轴承系统的影响,结果表明基座质量和刚度对水平地震振幅的影响显著。
本文以工作在柔性支承上的高速旋转机械转子为对象,以欧进萍改进地震波模型为输入,以碰摩力模型为限位器,采用拉格朗日方法建立了考虑支撑框架的转子系统动力学方程。计算分析了支撑框架对地震动响应中时域波形、碰摩时间、最大振幅的影响。
1 数学模型
1.1 地震动模型
地震动模型是作用于旋转机械转子系统的激励。在地震学中一般用地面加速度的功率谱密度来描述地震动模型。地震动响应的时域分析法,要求首先从功率谱密度模型生成一条时域曲线,作为系统的输入。该曲线的生成方法一般采用三角级数的余弦叠加法[19],下面对该方法进行简要描述。
地震动模型的功率谱密度函数有很多模型,例如金井清模型、周锡元模型等[20]。根据调研,采用欧进萍等[21]改进的地震波模型进型转机械在地震动冲击下的动力学分析。欧进萍谱描述如下
(1)
式中:S(ω)为其自谱密度;S0为基岩白噪声密度谱;ζg,ωg分别为地表覆盖土层的阻尼比和卓越频率;ωh为反映基岩特性的谱参数。
本文利用三角级数法,由欧进萍功率谱曲线合成人工加速度时程曲线,具体方法如下。首先生成幅值谱及相位谱。其中幅值谱由欧进萍功率谱生成,选取N个控制点,则将频域划分为N个频率间隔,每个控制点生成一个幅值如下
(2)
(3)
相位谱值φk服从随机分布。每一个控制点的均为独立的[0,2π]均匀分布的随机数。
由幅值谱及相位谱得到初始加速度曲线,该初始人工波为一平稳随机过程
(4)
对初始人工波进行包络处理,使之变为符合地震过程的非平稳随机过程。包络处理方法及包络函数如下
(5)
(6)
式中:tb,tc,c分别为主震段的首末时间和衰减参数,数值由平稳持时Td给出;tb=0.5Td;tc=1.2Td;c=2.5/Td。最后对加速度时程进行幅值调整,使其加速度峰值满足工程设计标准,最终生成一条可用于抗震分析的人工地震动加速度时程曲线。
在实际计算中,将地震动冲击视为一种基础振动,取地面为参考系,则转子系统在非惯性系中受到惯性力作用,具体形式如下,其中{m}为包含各节点质量的列向量。
(7)
本研究采用九级烈度地震动冲击,其非平稳随机地震动参数取值,如表1所示。地震载荷为单一x方向水平载荷。

表1 九级烈度下非平稳随机地震动参数[21]Tab.1 Nonstationary random ground motion parameters under intensity 9
1.2 碰摩力模型
旋转机械转子在地震动冲击下会与限位器发生碰摩。根据调研,采用碰摩力模型进行碰摩过程模拟可以很好地反映地震动冲击下的动力学响应[22]。在碰摩力模型中,发生碰摩时认为接触点产生了法向弹性回复力和切向摩擦力,示意如图1所示。
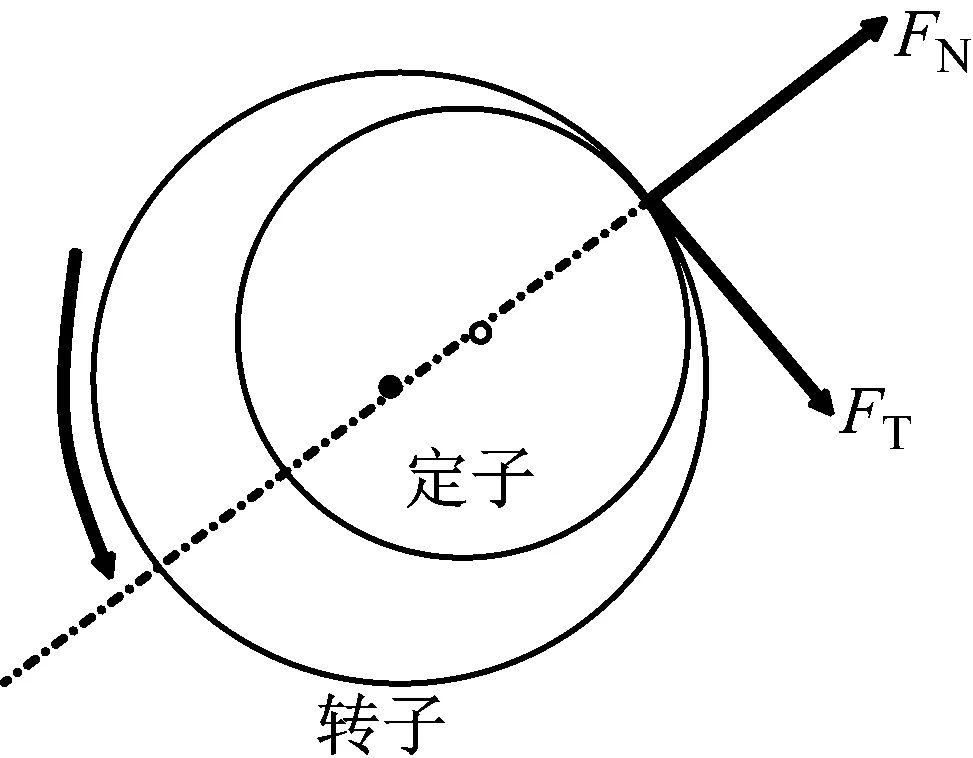
图1 碰摩力示意图Fig.1 Rub-impact force scheme
具体碰摩力如下所示
(8)
转化到直角坐标系中有
(9)

1.3 转子系统-支撑框架模型
考虑支撑框架的旋转机械转子系统,如图2所示。该系统模型由本实验室某专用设备抽象得到。转子系统左端是弹性支承,连接在外壳上,右端通过弹性支承连接到阻尼器上,阻尼器固定在外壳上,外壳安装在支撑框架上。为了保证转子系统在地震动冲击下不发生损坏而且恢复到正常运行,在转子左端安装了限位器,限位器安装在外壳上,其作用通过碰摩力模型来进行模拟。为了考虑支撑框架的影响,将转子系统的刚性支撑等效为了弹簧质量系统,如图2左支撑框架和右支撑框架所示。
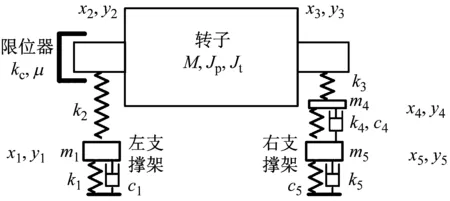
图2 考虑支撑框架的柔性支承转子系统Fig.2 The flexibly connected ultra-high speed rotor system with supporting frame
对于图2所示的转子支承限位器系统,假设转子为轴对称刚体,只在xy平面内振动,支承特性对称。转子的质量为M,极转动惯量为Jp,赤道转动惯量为Jt,左端支承刚度为k2,右端支承刚度为k3,阻尼器刚度为k4,阻尼器阻尼系数为c4,阻尼器质量为m4,限位器碰摩刚度为kc,碰摩摩擦因数为μ,左支撑框架等效质量为m1,等效刚度为k1,右支撑框架等效质量为m5,等效刚度为k5。整个系统包括左支撑框架、转子左端、转子右端、阻尼器、右支撑框架共10个自由度。
该转子以角速度ω旋转,转子长度为L,半径为r,左右两端的不平衡质量力矩分别为Ume1和Ume2,碰摩力作用在转子左端,记为Fx+iFy,地震动冲击作用在考虑支撑框架的转子系统上,记为Fe。根据拉格朗日方法可以得到上述转子限位器支承的控制方程为

(10)
式中:{r}为虚数形式的自由度,共5个,分别为ri=xi+iyi(i=1,2,3,4,5),系统中的质量矩阵、阻尼与陀螺矩阵、刚度矩阵、广义力如下,其中广义力包含三项,其中第一项为不平衡质量引起的广义力,第二项为碰摩力,第三项为地震惯性力
(11)
(12)
(13)
(14)
对静止状态的转子系统进行理论模态分析,并开展试验模态分析,将二者前几阶模态进行比较,结果如表2所示。可以看出二者基本保持一致,证明本模型可以保证准确性。
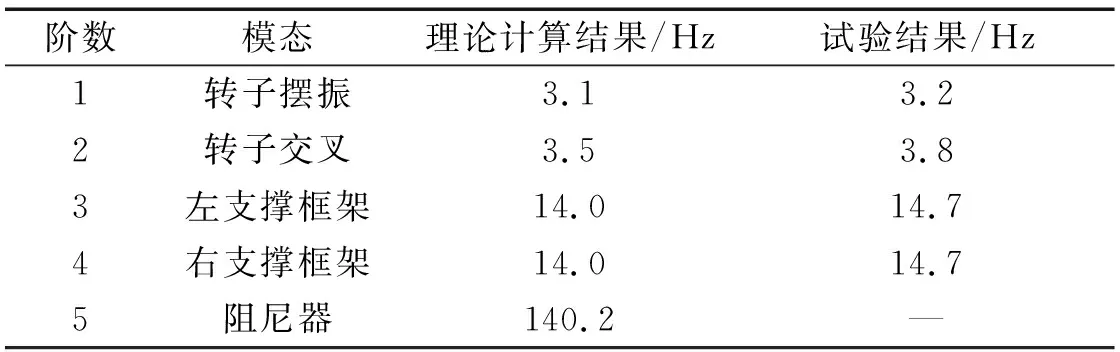
表2 理论与试验模态分析结果比较Tab.2 Modal comparison of theoretical and experimental results
2 计算方法
采用标准四阶Runge-Kutta算法对式(10)进行求解。地震动冲击采用式(5)中的模型和表1中的参数。限位器的碰摩间隙为2.0 mm,碰摩刚度为1×105N/m,碰摩摩擦因数为0.1。转子上下不平衡力分别是21.8 mg·mm,29.0 mg·mm。首先仅考虑不平衡质量载荷,计算转子系统在工作转速下的工作振幅状态,然后以该工作状态作为初值,施加地震动载荷(即地震动载荷加速度信号),得到转子系统随时间的响应;在计算过程中,如果转子振幅超过限位器限制,则应用碰摩力模型处理。
3 结果分析
3.1 时域响应
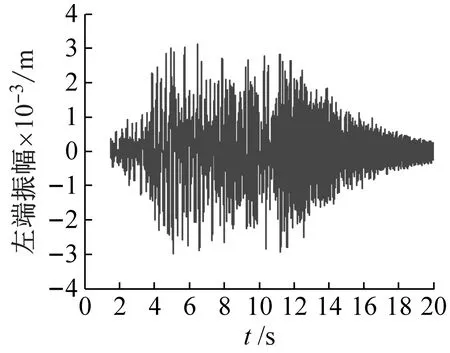
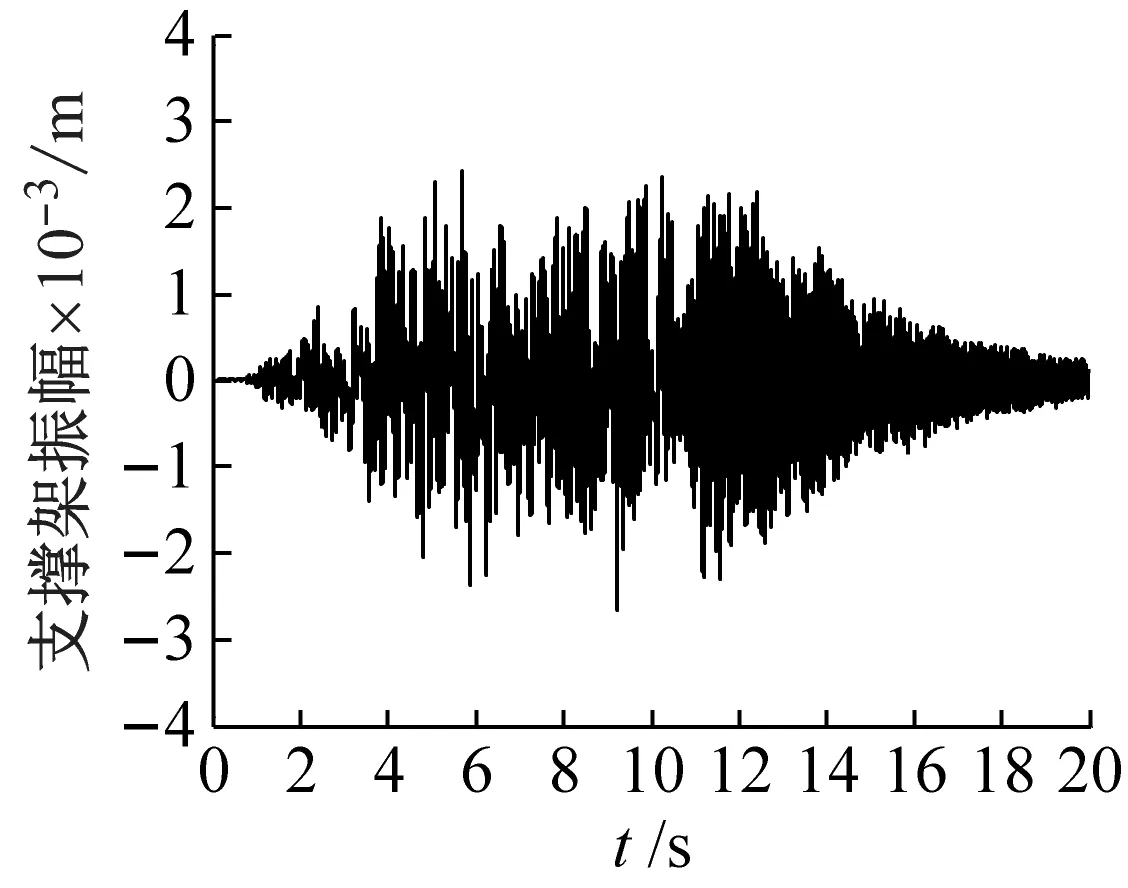
首先通过计算得到了转子系统在地震动载荷作用下的时域响应,如图3~图5所示,计算中考虑了3种不同的支撑框架刚度,分别是5×106N/m,7.5×106N/m,10×106N/m,给出了转子左右两端和右支撑框架的地震动响应。
(a) 5×106 N/m
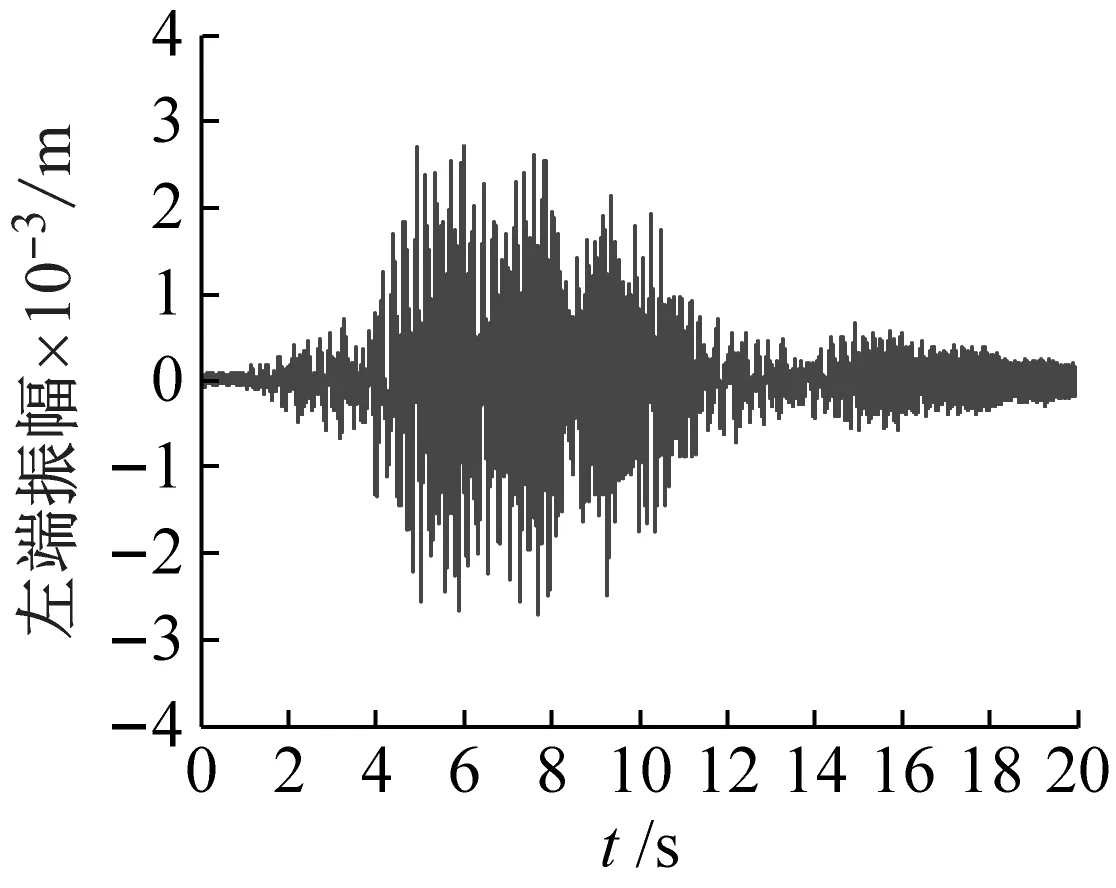
(b) 7.5×106 N/m

(c) 10×106 N/m图3 转子左端在地震载荷下的响应(k1=k5)Fig.3 Seismic response of the left of rotor system (k1=k5)
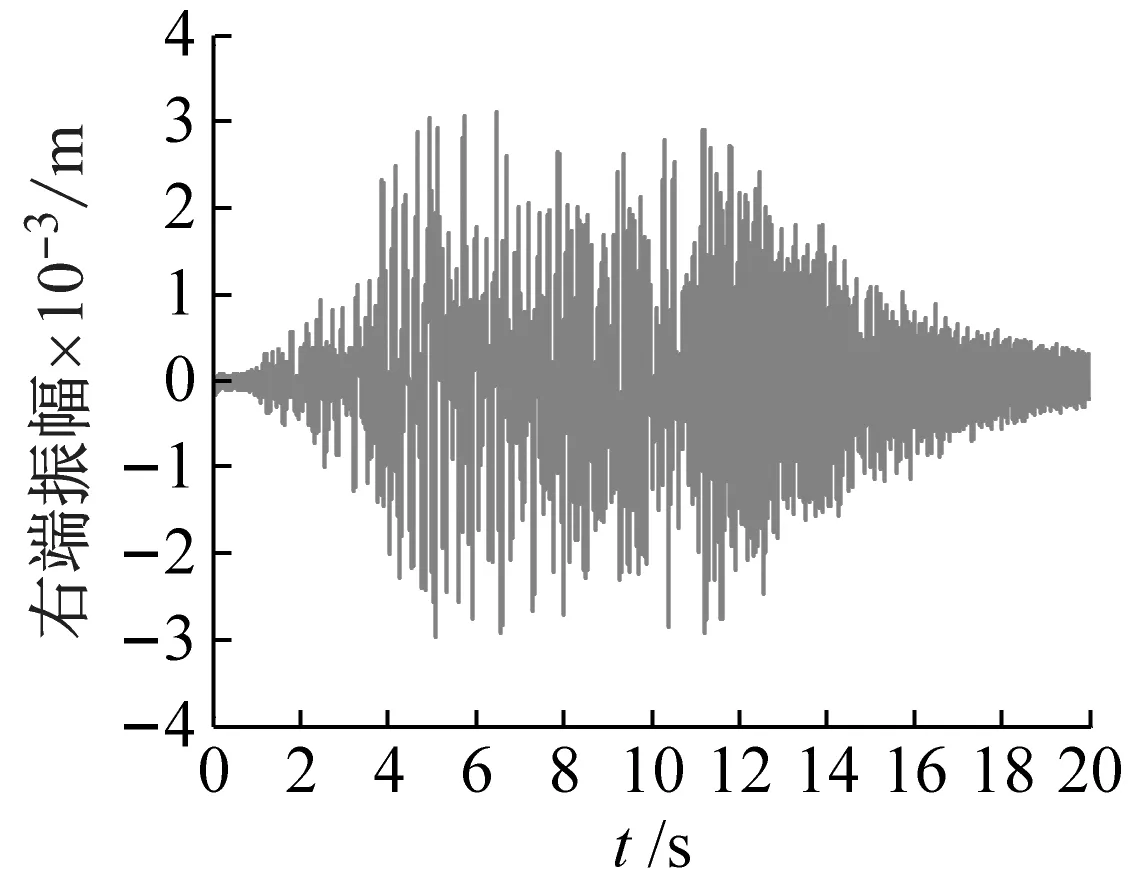
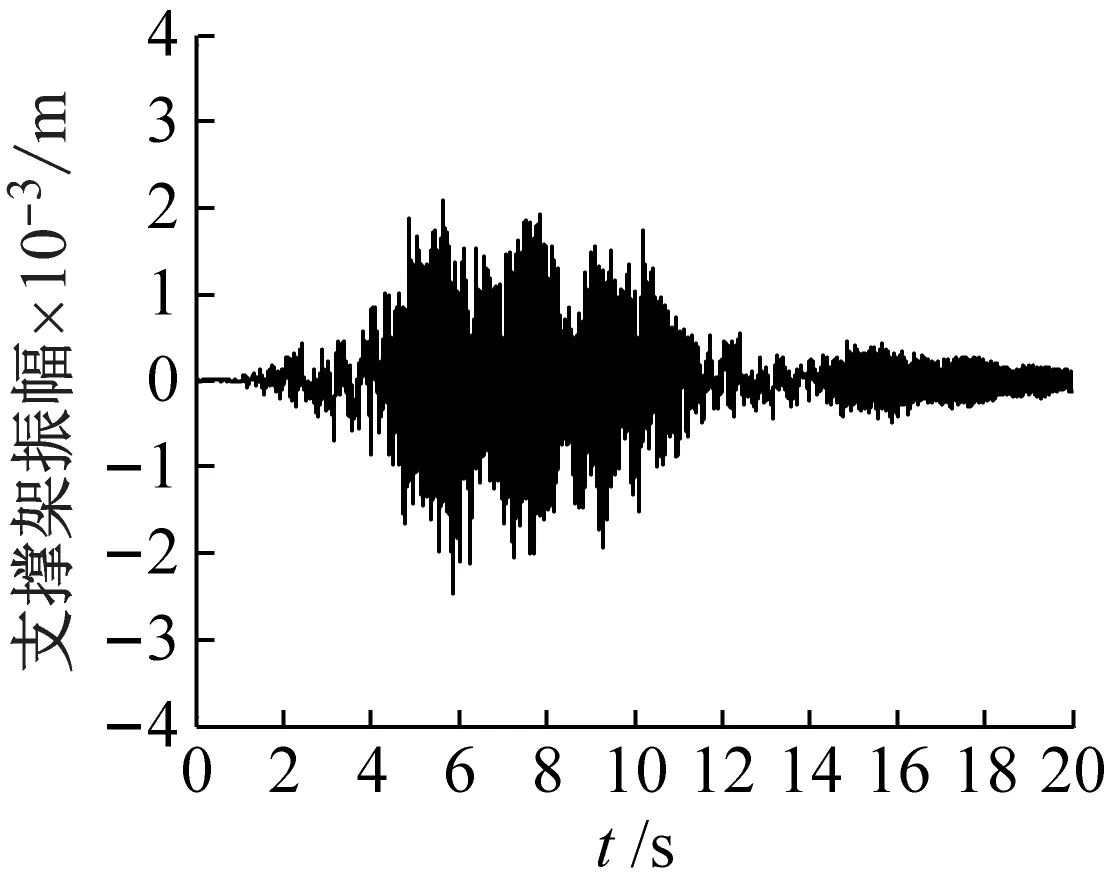
(a) 5×106 N/m
(b) 7.5×106 N/m
(c) 10×106 N/m图4 转子右端在地震载荷下的响应(k1=k5)Fig.4 Seismic response of the right of rotor system (k1=k5)
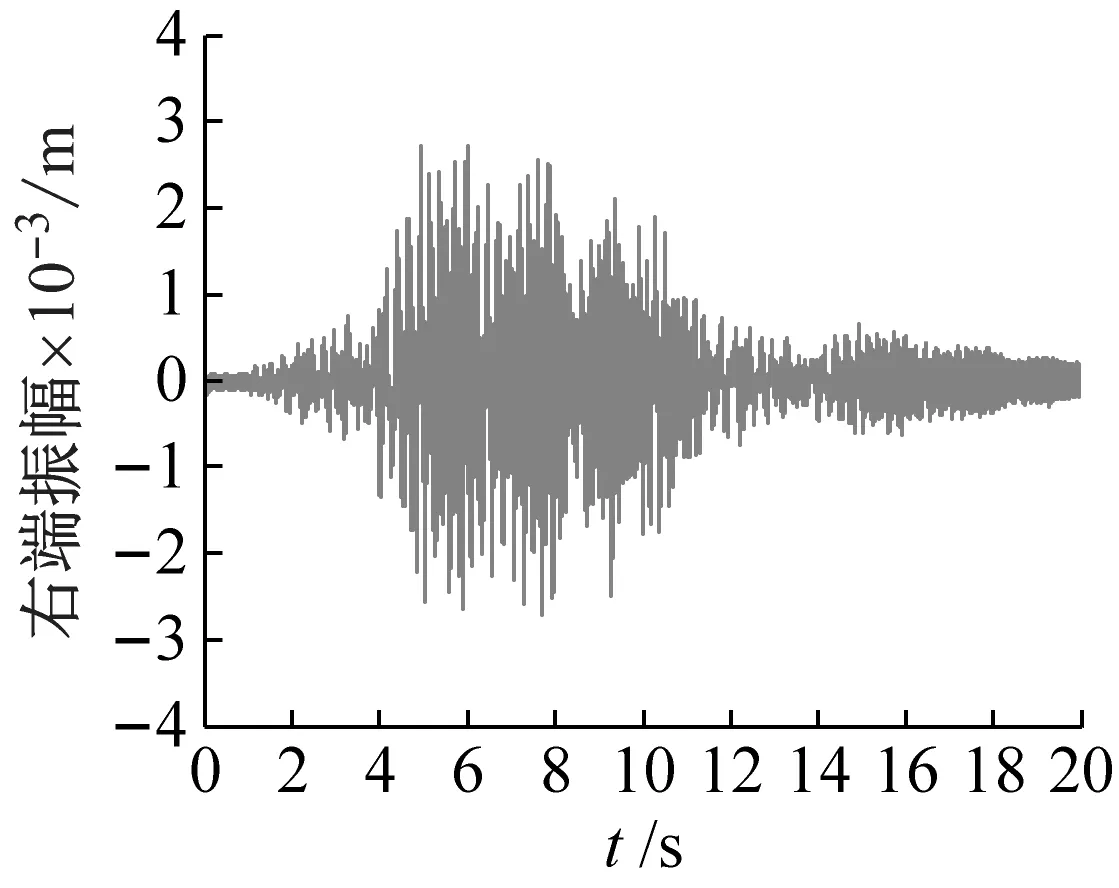
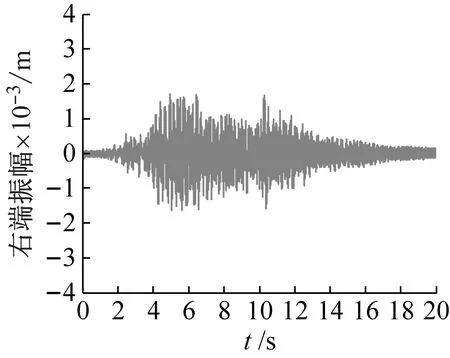
(a) 5×106 N/m
(b) 7.5×106 N/m
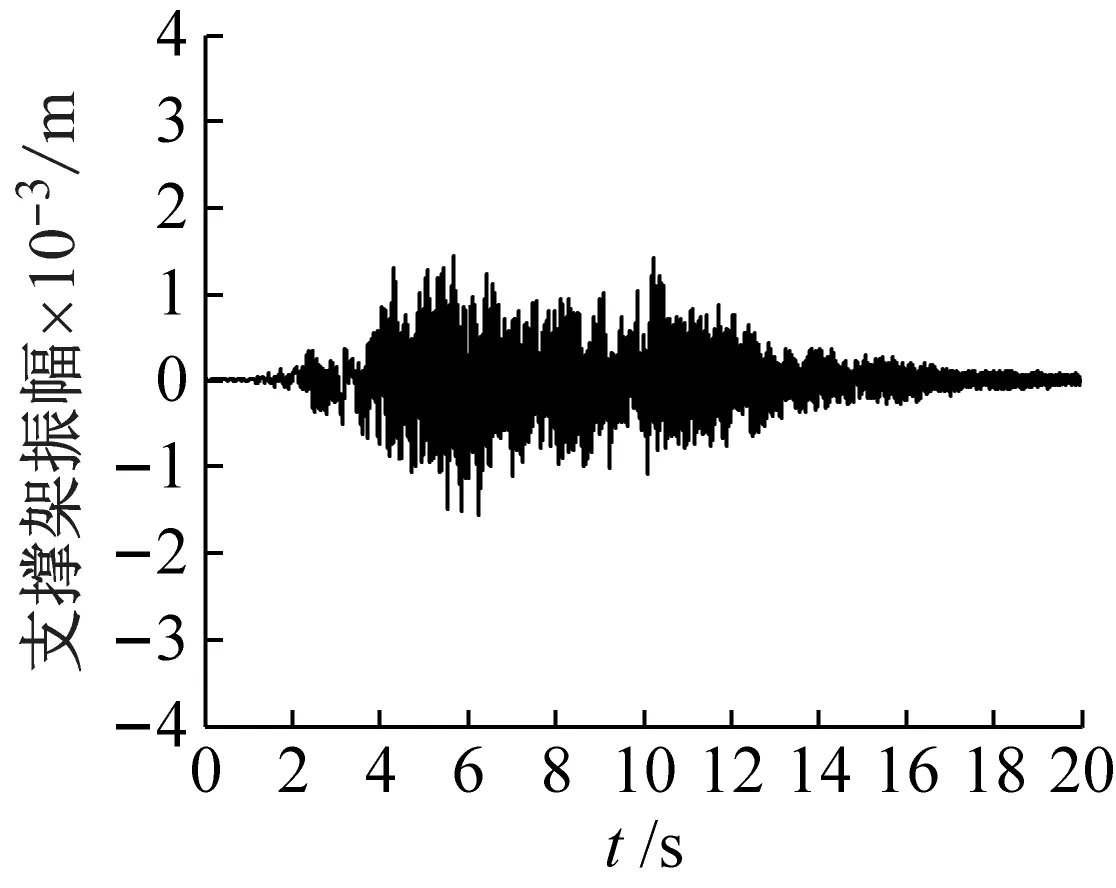
(c) 10×106 N/m图5 右支撑架在地震载荷下的响应(k1=k5)Fig.5 Seismic response of the right of supporting frame (k1=k5)
从图中的振幅随时间变化结果看出,转子左端、转子右端、支撑架处振幅随时间变化呈现出一致的规律,第一个振动峰出现在4~6 s内,第二个振动峰出现在10~12 s内,在支撑框架刚度较大时这两个振动峰更容易辨识。在支撑框架刚度一致时,转子左右两端的振幅基本相同,是支撑框架振幅的约1.5倍。
提高横向刚度,对转子振幅的改善是显著的,不仅降低了最大振幅,而且减少了振幅较大的时间。在横向刚度7.5×106N/m时,在12 s振幅基本就衰减了,但振幅峰值还没有明显减小,但在横向刚度10×106N/m时,振幅峰值已经减小很多。
假设某一烈度地震波能量相同,则为了使运行在支撑框架上的转子系统达到同样地振动情况,则支撑框架首先达到同样地振动情况,而支撑架的横向刚度越大,达到同样振动情况所需的弹性势能就越大,在地震波能量相同的时候,存储在支撑架中的能量越大,则传递到单机转子系统中的能量越小。这就是提高水泥框架横向刚度可以减小转子系统振幅的原因。
3.2 参数分析
为了定量地分析转子系统在地震载荷下的动力学特性,提出两个指标进行定量分析:一是统计在响应过程中振幅大于碰摩间隙的时间,作为发生碰摩的时间,表征转子发生碰摩的程度;二是统计在响应过程中的振幅最大值,表征转子承受到的瞬时冲量大小。共对4个变量进行了计算分析,分别是支撑框架的刚度、质量、基频、阻尼,结果如图6~图9所示。
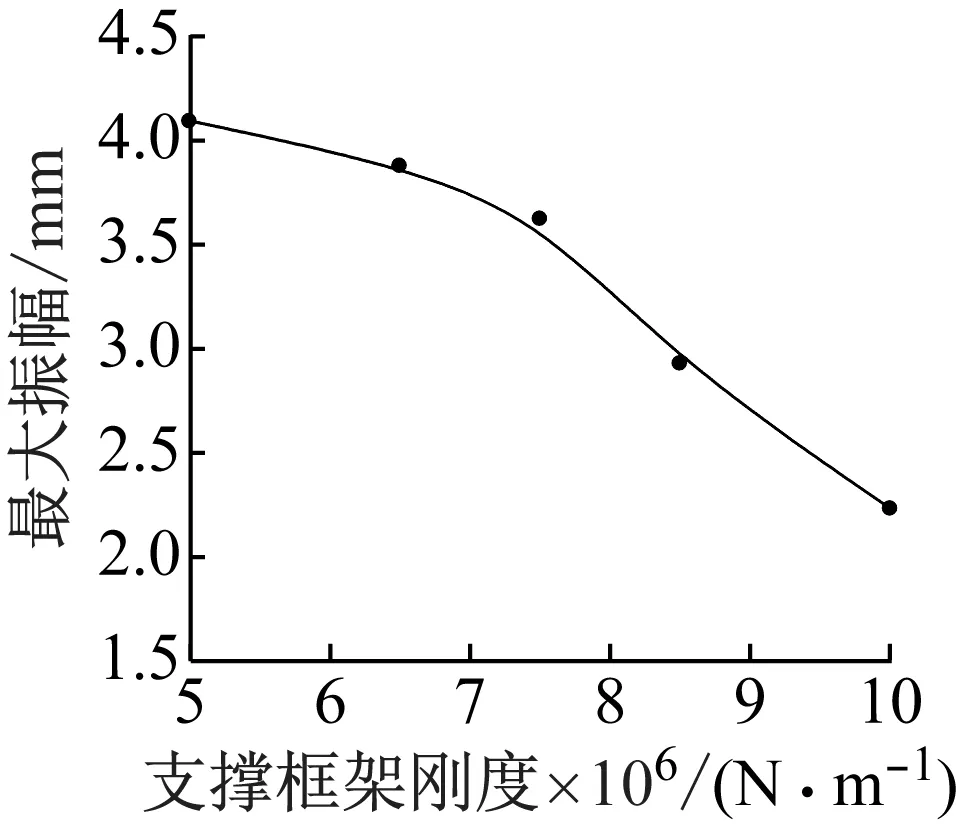
(a)
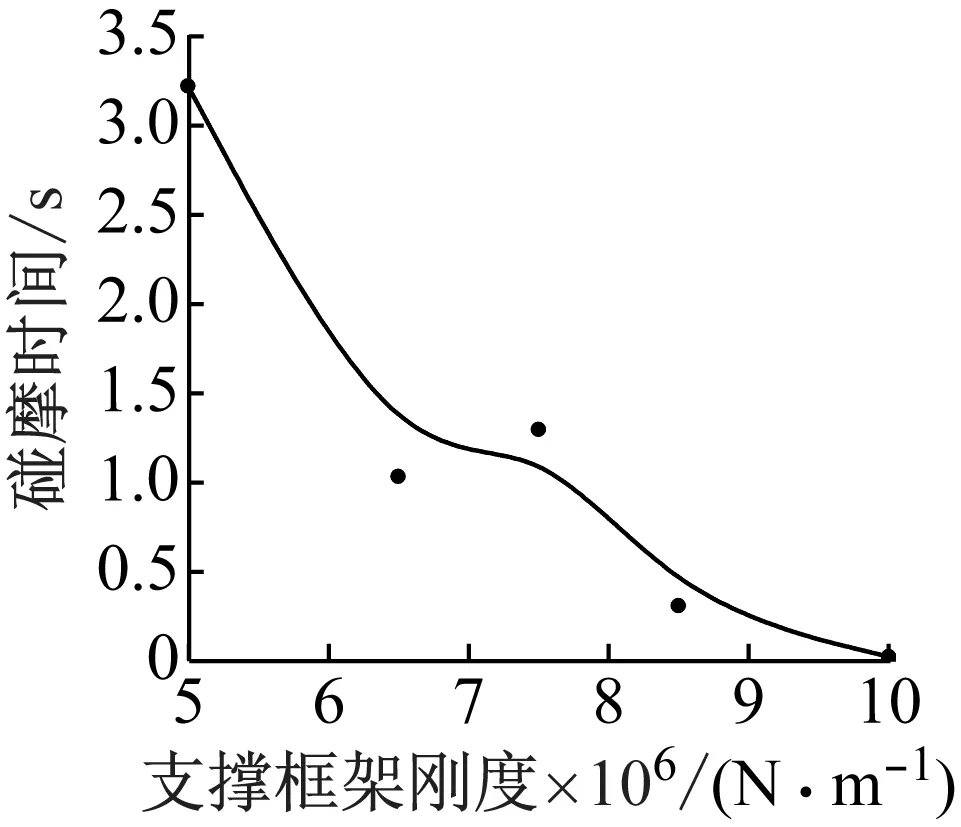
(b)图6 支撑框架刚度对地震动响应的影响Fig.6 Influence of supporting frame stiffness on seismic response
(a)
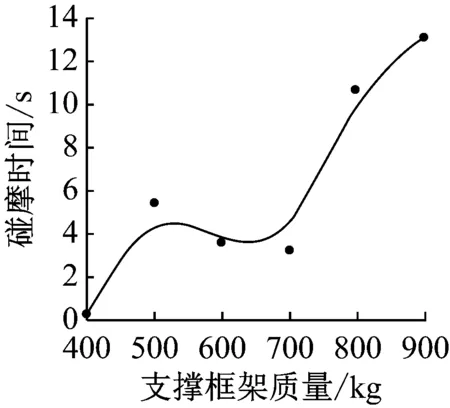
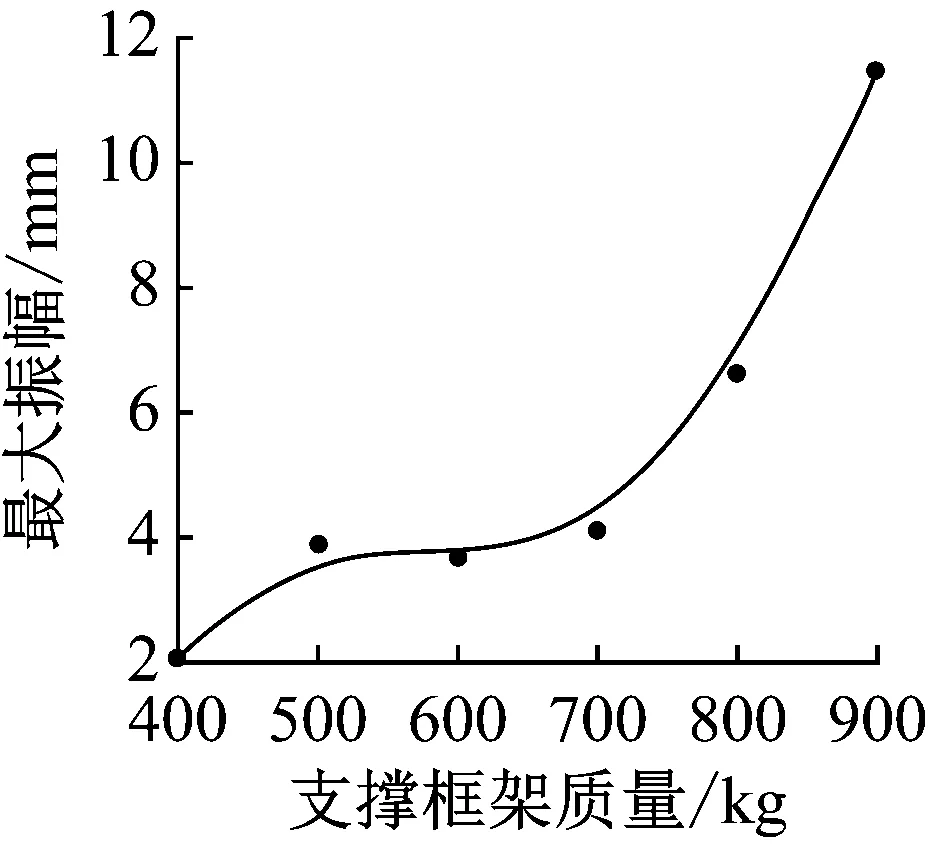
(b)图7 支撑框架质量对地震动响应的影响Fig.7 Influence of supporting frame mass on seismic response
(a)
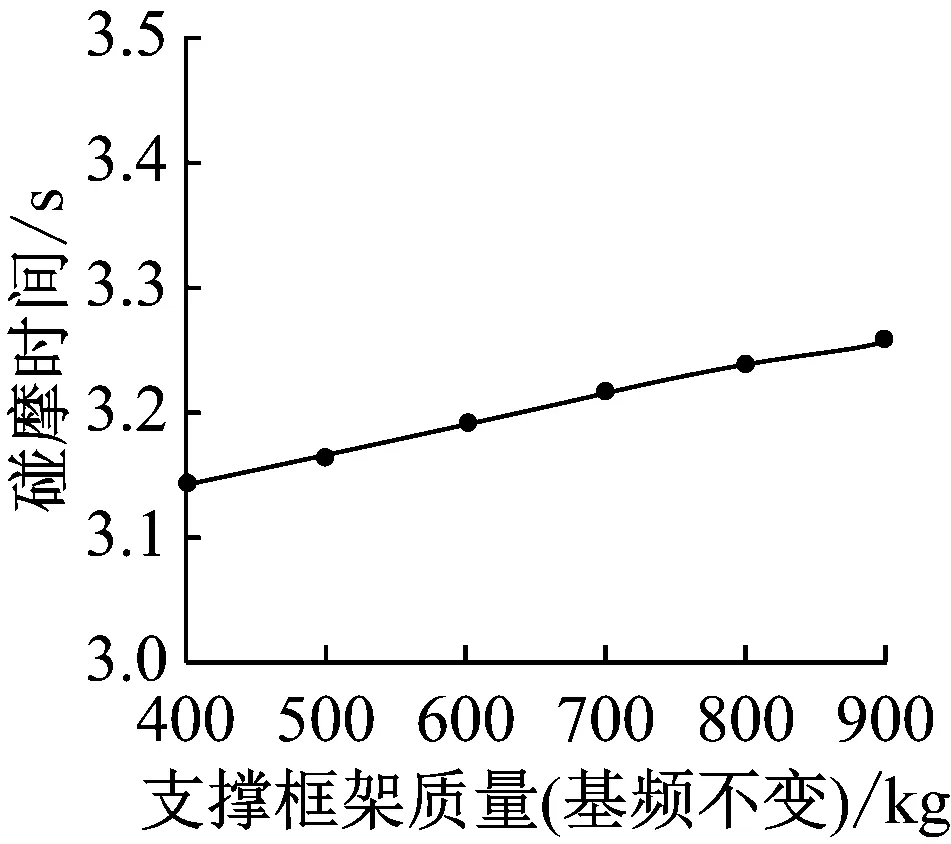
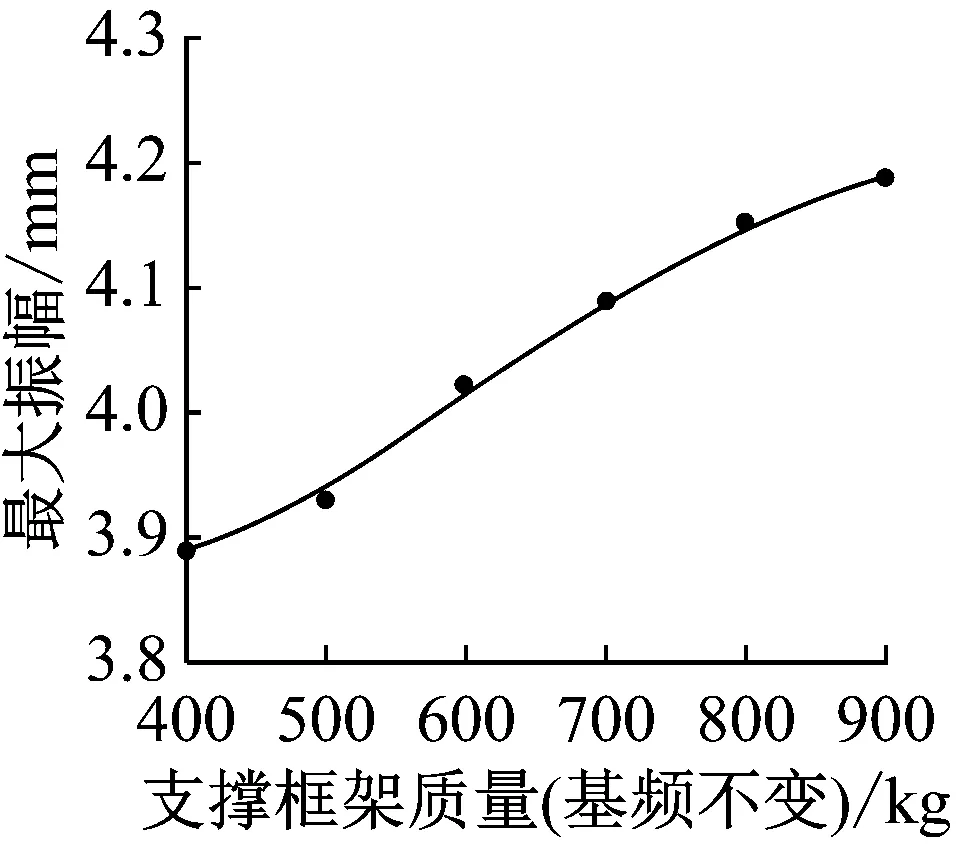
(b)图8 支撑框架基频对地震动响应的影响Fig.8 Influence of supporting frame fundamental frequency on seismic response
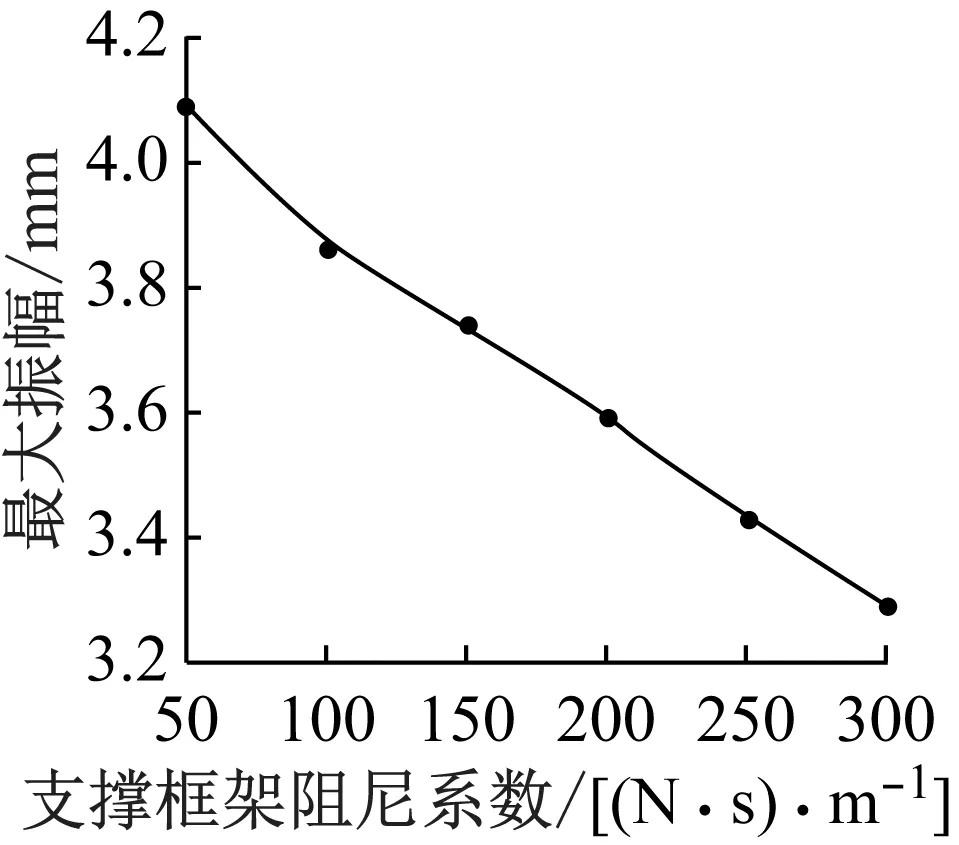
(a)
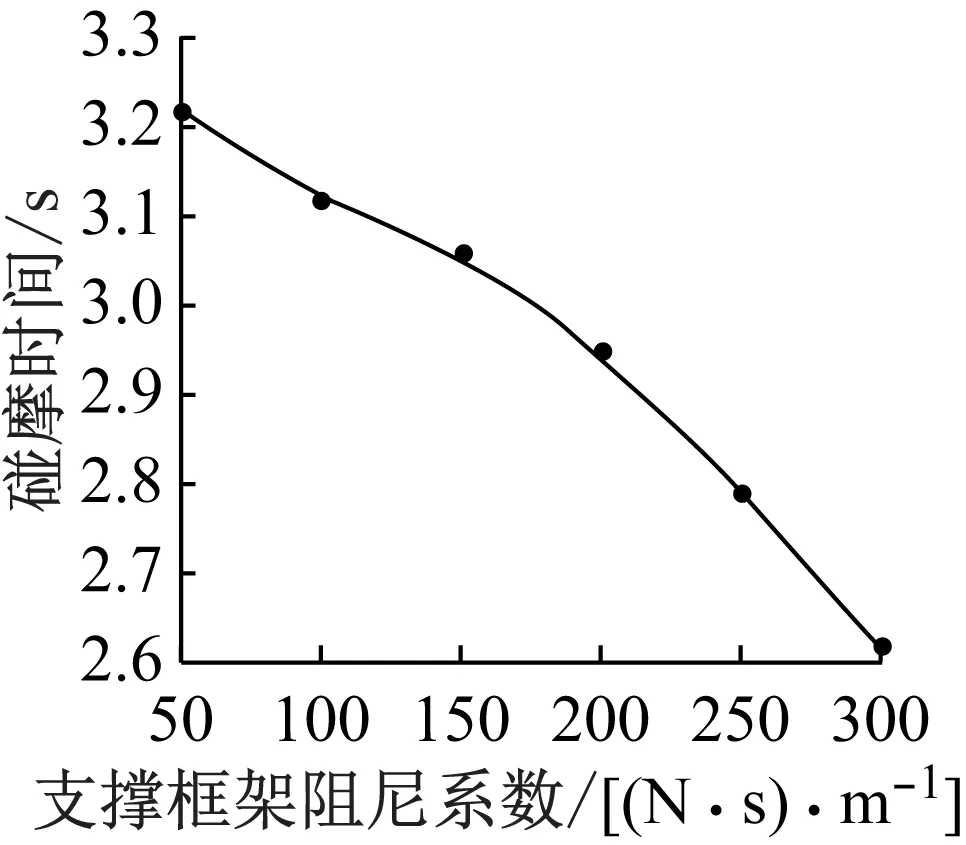
(b)图9 支撑框架阻尼对地震动响应的影响Fig.9 Influence of supporting frame damping on seismic response
从图6看出,随着支撑框架横向刚度增加,最大振幅持续降低,碰摩时间持续降低,这意味着对转子损伤的降低;支撑框架刚度提高一倍后,最大振幅减少约50%,碰摩时间减少约100%,这表明在支撑框架刚度增加到一定程度后,将有效抑制地震载荷对转子系统的影响,转子不会与限位器发生碰摩。
从图7看出,随着支撑框架质量增加,最大振幅持续增大,呈现出先慢后快的趋势,碰摩时间整体形势也是增大,但在500~600 kg内有一定波动;支撑框架质量增大约一倍后,最大振幅增加6倍,碰摩时间从0增加到约13 s,这表明支撑框架质量对转子系统的地震动响应有显著影响,需要在工程设计中加以控制,否则要考虑在增加质量的同时提高支撑框架刚度。
由于图7中碰摩时间的曲线不是单调上升,产生了支撑框架基频是否影响地震动响应的关键因素的想法,于是在保证支撑框架基频不变(支撑框架刚度与质量之比不变)的情况下,进行了计算分析,得到图8,图8以质量作为横坐标。从图8看出,在基频不变时,最大振幅和碰摩时间基本保持不变,其中最大振幅增大约7%,碰摩时间增大约3%;这表明如果要保持同样的地震动响应,简单设计的话可以在质量增加的同时同比增加刚度,严格设计的话,刚度还需要多增加一部分。
从图9看出,随着支撑框架阻尼增加,最大振幅持续降低,碰摩时间持续降低;阻尼系数增大6倍后,最大振幅降低约19%,碰摩时间降低约18%,这表明支撑框架阻尼对抑制地震动响应有一定的作用,但与支撑框架刚度相比较差。
综合图6~图8的结果来看:图6可以认为是基频逐步增大对地震动响应的影响;图7可以认为是基频逐步减小对地震动响应的影响;图8则是基频保持不变时的影响。在工程设计中应该先从保持基频不变的思路出发,如果支撑框架质量增加不可避免,而刚度又增无可增,就需要增加支撑框架上的阻尼,这样才能保证系统的地震动响应处于安全的范围内。
4 结 论
本文针对工作在柔性支承上的高速旋转机械转子,在地震动模型、碰摩力模型分析的基础上,建立了考虑支撑架的转子动力学方程,形成了瞬态计算方法,计算并分析了支撑框架对转子系统地震动响应的影响,得到如下结论:
(1) 转子和支撑框架地震动响应呈现出一致的规律,转子左右两端的振幅基本相同,约是支撑框架振幅的1.5倍。
(2) 最大振幅和碰摩时间随支撑框架刚度单调增长、随质量单调减小、随阻尼单调减小;支撑框架基频是影响转子系统地震动响应的关键因素。
(3) 在工程设计中应该先从保持基频不变的思路出发,如果支撑框架质量增加不可避免,而刚度又增无可增,则增加支撑框架上的阻尼。
