温室棚顶清洗机的研究进展
2022-11-07杨臻昊尹海燕
杨臻昊,尹海燕
(温州大学 机电工程学院,浙江 温州 325000)
温室分为玻璃温室、塑料薄膜温室和PC阳光板温室,其中塑料薄膜温室面积高达292万hm2,占比为63.5%,亚洲国家所占的面积最大。据《2022—2028年中国温室大棚行业发展现状调查及市场分析预测报告》,中国温室大棚以塑料大棚为主,占比高达65.4%。我国南方地区主要使用的是塑料大棚,长时间使用后,大棚薄膜上经常会覆盖有灰尘,并滋生苔藓,致使大棚的透光率下降,影响大棚内作物的健康生长,并导致温室大棚的产量过低,无法实现应有的经济效益和社会效益。因此,有必要定期清洗大棚棚顶,恢复薄膜透光率,进而提高作物的产量。国内现在的主流清洗方式仍是人工清洗,但温室大棚的跨度大且高度高,人工清洗存在一定的困难,同时也存在不小的安全隐患。温室大棚棚顶清洗机的出现、普及和应用可以显著提高清洗效率,并有效减少甚至消除人工清洗时存在的各类安全隐患。此外,温室大棚棚顶清洗机也是温室配套自动化技术的发展趋势之一。
1 国外研究现状
20世纪60年代以来,在温室和大棚建设及管理方面,一些发达国家开始发展设施农业建设,各自具有独立的特色和经验。荷兰是设施园艺最发达的国家,其温室自动化程度高,广泛地应用了工业自动化控制技术。温室顶面清洗全部采用自动化机械清洗,清洗机将以天沟作为轨道,高压水作为清洗水,利用毛刷可以高效地将温室表面的灰尘清洗干净,该类清洗机在荷兰乃至欧洲各国被广泛使用,其相关技术在已较为成熟。荷兰的温室棚顶清洗机主要分为2种结构形式,一种是机械结构为“人”字型,一种是“Y”字型清洗机,该类清洗机清洗效果好、效率高,但是设备比较笨重,需要配套横向移动装置或者大型起吊设备才能使用,不适合有遮阳网的中国南方的大棚清洁,如图1—图2所示。

图1 “Y”字型清洗机

图2 “人”字型清洗机
以色列的温室设备材料、滴灌技术和种植技术均属世界一流。利用尼龙旋转毛刷使温室棚顶灰尘等附着物与棚顶脱离,再用真空吸尘原理的机构将杂物吸进集尘箱,整机悬挂在一个桥式的机架上,机架安装在温室旁的坡道上。该清洁机不具有适用性,若要清洗不同尺寸规格的温室,需要制作不同尺寸的连接桥臂,整机体积较大,加工成本较高,不适用于我国有遮阳网的塑料温室的清洗,此外其清洗效果并未得到验证。
土耳其研究设计了一种可用于温室屋顶玻璃清洁的四足四轮移动机器人,如图3所示。该机器人由4条腿和4个轮子组成。其中,4个轮子用于驱动机器人,使其能够沿着固定的轨道进行横向移动,在机器人清洁完毕其所在轨道所对应的玻璃温室部分时,机器人可以利用4条腿,使机器人从一条轨道跨到另一条轨道上,从而实现轨道之间的切换,进而实现机器人在整个大棚上的自动化移动。该机器人使用旋转毛刷和从外部接入机器人的水清洗玻璃。机器人的运动部分和清洗装置部分都由电动机驱动的,电能则由连接到电网的电缆提供。该清洁机器人适用于支架外露的玻璃温室的清洗,且电能消耗较大,其仍处于实验状态,清洗效果尚不可知。
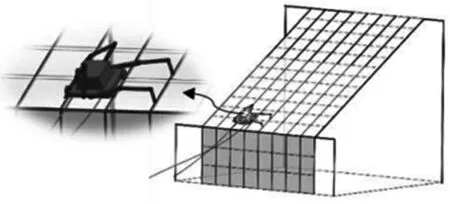
图3 四足四轮移动机器人
2 国内研究现状
与荷兰、以色列等国家的自动化、集约化的连栋温室清洗装置不同,中国温室顶棚大部分仍由人工进行清洗,因此,中国的温室自动化配套清洗装置有着不同于其他国家的独特的发展道路,适用于我国的温室清洗装置也与发达国家有较大的不同。
2014年,徐州市泰瑞农业科技有限公司发明了一种导轨式塑料温室清洗机,首先要在温室主体上架设可供移动支架行走的导轨,水泵将储水罐中的水加压后从一排喷头中喷出,依靠水压的冲击达到冲刷棚膜上尘屑的目的。该清洗机存在的缺点是:架设清洗机需要另加导轨,而且仅通过水的冲洗来达到清洗的目的会浪费较多水资源,且不易冲洗掉棚膜上生长的苔藓和部分顽渍。
2016年,朱康熹等设计了一种用于塑料温室清洗的清洗机,如图4所示,清洗机包含8个单节清洗装置,由温室骨架和棚顶薄膜共同支撑,可与拱形棚顶的弧度自然贴合,清洗机采用支架连接行走机构和清洗机构组成单节清洗装置,为了能模仿棚顶的弧形,将多节清洗装置铰接构成清洗机整体。该清洗机的总长度是根据清洗对象而定制的,单节清洗装置无法伸缩,对于棚顶弧长不一致的温室,其工作效果将受到影响甚至不能工作,另外,此装置缺少给水装置,对清洗效果将有一定影响。
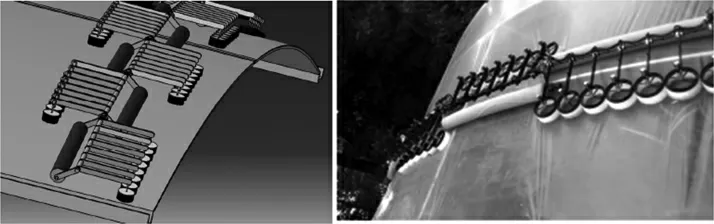
图4 多节清洗装置组合
2018年,山东农业大学的陈天军等研制成功一种大棚清洗装置,如图5所示,分别为第三代样机与第四代样机。清洗后薄膜透光率可显著提高,由于是半自动清洗机,当清洗机完成日光温室一段清洗作业,可解开压膜绳,卸下整体装置并搬动至下一段,再系上压膜绳,通过绕绳轮随转轴转动来实现压膜绳的收放过程,进而改变清洗位置,该机目前还处于实验阶段,而且清洗效率低,在一段大棚清洗结束后,仍需要人工辅助调整清洗装置至另一段大棚,此过程未实现清洗过程的全自动化,而且该机尚存在续航能力,整机重量及提高效率等问题。

图5 山东农业大学大棚清洁装置
2019年,由西南大学研制的温室大棚清洗机,如图6所示,该清洗机利用间隔为1 m的磁力轮在大棚棚顶运动以实现清洗作业的装置。磁力轮可以隔着薄膜吸附在骨架上,来保证清洗机在清洗时不会坠落、漂移等,同时以大棚已有的结构来当作机器运动的轨道而无需安装新的结构,这给清洗机的安装和作业带来了很大的便利。清洗机可以与不同跨度、不同曲率的大棚配合,极大地增强了设备的适用性。该清洗机以自身的喷水装置配合上毛刷可以做到快速有效地清洗薄膜,清洗效果令人满意。但对于南方连栋塑料大棚的清洗仍有些不便,无法实现连栋大棚之间的自动化移动。

图6 磁力轮式清洁装置
2020年,韩波等设计的大棚清洗装置,该清洗机含有底座,通过在底座上安装滚轮和万向轮,实现清洗机构的移动。通过可伸缩软毛刷顶端的弹簧实现毛刷与大棚棚面的紧密贴合,从而达到全面清洗的目的。而且,本装置有第二喷水区,在清洗完成后会对大棚进行冲刷,提高大棚的清洁度。但本装置未考虑遮阳网对清洗机高度的限制,也未考虑连栋式大棚的连续清洗。
2021年,易少燕设计了一种农业大棚清洗装置,该清洗装置由旋转盘带动滑块移动,再由滑块带动刷尘装置和喷水装置移动,从而实现水平方向的清洁。该装置既可以单独使用刷尘装置,来扫除棚顶的灰尘,也可以将刷尘装置和喷水装置结合使用,达到较好的清洁效果。该清洗装置还带有循环过滤装置以提高水资源的利用率。该装置适用于独栋大棚的清洗,操作简单,但不适用于连栋式大棚的清洗。
2022年,王安臻设计了一种塑料大棚棚顶清洗装置,该装置的主要结构为移动构架和拱形析架。其中,移动构架的底部安装有多个滚轮,使移动构架能在位于大棚两侧的轨道上运动。拱形析架则由多个析架单元依次拼接而成,并采用铰接固定,且在析架的底部固定有交错设置的多个清洗组件。拱形析架在移动构架的带动下进行移动,实现清洁功能。该装置可以调节拱形析架的拱形弧度,提高清洗组件和大棚表面的贴合程度,从而提高清洗效率,但只适用于独栋大棚的清洗,无法实现连栋式大棚之间的移动及清洗。
2022年,王云力等设计了由2套清洗单体(1套主机和1套副机)及清洗带组成的塑料大棚清洗机。其主机和副机分别布置安装在塑料大棚两侧的天沟内,而由化纤编织网制成的清洗带则紧贴塑料大棚的棚顶,清洗带的两端分别连接在主机和副机上。在使用中,在天沟上分别持有主机和副机的操作人员,同时向前移动,主机和副机的缠绕滚保持同向转动。正转时,主机上的缠绕滚收紧清洗带,副机上的缠绕滚放松缠绕带,使紧贴棚顶的清洗带向主机一侧移动。到设定的时间后,2个缠绕滚同时反转,此时主机上缠绕滚放松清洗带,副机上的缠绕滚收紧清洗带,紧贴棚顶的清洗带向副机一侧移动,直至移动到设定的时间后,2个缠绕滚又同时改变转动方向。如此往复,能够通过清洗带将塑料大棚棚顶表面的灰尘和绿藻等搓擦下来,从而实现清除棚顶污染物的目的。在清洗带来回搓拉的过程中,使用普通的PVC软管或水枪不断向清洗带上喷洒清水,就能使搓拉掉的灰尘顺着水流流走。本装置结构简单且制造成本较低,易于更换,但只适用于较低的塑料大棚,仍然以人力为主,且未实现塑料大棚的自动化清洗。
3 结论
综上所述,由于目前,中国的温室大棚仍以个体户为主,且大多数为塑料大棚,故清洗机的发展一定是向着更简洁、易于推广的方向前进。近些年来,在农业自动化浪潮的推动下,塑料大棚正在向大型化、连栋化的方向发展,且还在不断进行升级改造。随着机械化、智能化、自动化技术的广泛应用,塑料大棚的生产效率将有显著提升,人工成本也能进一步得到降低。针对我国南方普遍使用的带有遮阳网的连栋式塑料温室棚顶清洗困难的问题,通过分析国内外研究现状,针对国内现有的普遍使用的圆弧形的骨架为主的塑料大棚,由于棚顶覆盖的薄膜不能作为着力点,因此可以通过将塑料大棚原本的支撑框架作为清洗机的支撑机构,进而实现大棚薄膜的自动化清洗。
