基于PLC的空气压缩机自动控制系统设计
2022-11-03唐杰
唐杰
(中国航发湖南动力机械研究所,湖南 株洲 412002)
0 引言
空气压缩机是基于空气分离技术和压缩技术的机械设备,由于其性能优越、操作简单、适用性强,已经被广泛应用到医疗、化工、钢铁等多个领域中,比如医疗用品氧气瓶或者氧气袋,其制作就是应用空气压缩机将高纯度的氧气压缩到袋内和瓶内。空气压缩机运行是否平稳,直接关系到相关产品的生产质量和生产数量,同时还关系到产品安全问题,因此对空气压缩机进行自动化控制,是实现产品批量化生产的关键。20世纪80年代,美国开展了空气压缩机自动控制系统设计研究,推出了世界上第一套自动控制系统,但是由于该项技术还不够成熟,该套自动控制理论并不适用于空气压缩机自动控制。随后,英国学者在其基础上对自动控制系统进行了优化和完善,丰富了空气压缩机自动控制理论。国内空气压缩机自动控制技术起步比较晚,虽然近几年掀起了空气压缩机自动控制系统设计研究热潮,并取得了一定的研究成果,但是现有的系统仍然存在一定问题,在网络过载、运行时间过长、控制指令较多时,系统会出现死机和停运现象,这种表现表明了现有系统鲁棒性较差,已经无法满足空气压缩机自动控制需求,为此提出基于PLC的空气压缩机自动控制系统设计。系统硬件方面设计可编程逻辑控制器(PLC)和传感器,利用PLC对空气压缩机运行逻辑进行控制,利用无线传感器采集电流、电压、流量以及压力等数据;系统软件方面,由信号输入单元对信号进行压缩、放大等处理,实现对数据的采集,利用模糊控制法对空气压缩机运行误差进行计算,并对其进行相应的控制。
1 系统硬件设计
实验硬件主要由可编程逻辑控制器(PLC)、传感器两部分组成,除此之外,还包括一些基础性硬件,比如服务器、显示器、鼠标等,这些基础性硬件在此不做过多说明,系统硬件拓扑图如图1所示。
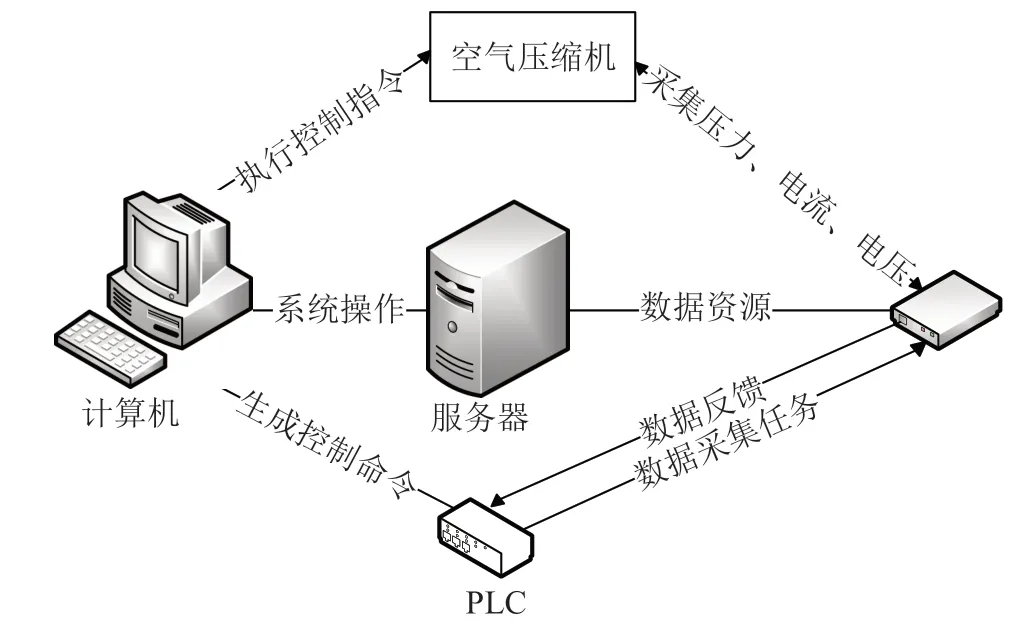
图1 空气压缩机自动控制系统硬件拓扑图
如图1所示,PLC 根据系统控制逻辑,生成空气压缩机运行数据采集任务,发送给传感器,控制传感器对空气压缩机压力、电流、电压等数据进行采集,然后将其反馈给PLC,PLC 根据空气压缩机常规运行逻辑,识别到异常状态,并生成相应的控制指令发送到系统计算机上,并对空气压缩机进行自动控制,使其恢复到正常运行状态。
1.1 可编程逻辑控制器(PLC)设计
根据系统功能需求,此次将可编程逻辑控制器(PLC)作为空气压缩机控制装置,采用型号为KIDSH/5545PLC,选用STM56SFF565 单片机作为PLC 控制芯片,其由单片机、程序存储器、数据转换器和CPIO 端口四部分组成,采用串联的方式将PLC 与系统电源总线连接,并通过标准的网络接口与局域网连接,与传感器和空气压缩机联网。通过CPIO 端口向传感器发送数据采集任务,并通过该端口接收到传感器采集的气压、电流和电压等信号,由数据转换器将采集的模拟量数据转换为数字量信号,并对信号进行放大处理,发送给STM56SFF565 单片机。单片机事先学习空气压缩机运行程序,根据采集到的信号生成控制指令,根据空气压缩机自动控制需求,设计了AT+CIPCLOSE 开关关闭、AT+CIPOUP 开关开启、AT+CIPIOEW 出口压力初始化、AT+CIPWRYY 进口流量初始化四个控制指令,程序存储器根据控制指令生成控制程序并存储。如果当前空气压缩机电流和电压超出标准范围,则需要关闭空气压缩机开关,如果当前空气压缩机开关自动跳闸,电压和电流为零,则需要开启开关,生成的关闭开关控制逻辑编码为“0”,生成的开启开关控制逻辑编码为“1”,如果当前空气压缩机出口压力和进口流量超出标准范围,则需要将该两个运行参数进行初始化,生成的出口压力初始化控制逻辑编码为“-1”,生成的进口流量输出化控制逻辑编码为“2”,通过执行以上四个控制逻辑,实现对空气压缩机自动控制。
1.2 传感器设计
传感器的作用是采集空气压缩机运行数据,要实现对空气压缩机的全面控制,需要了解到空气压缩机的电流、电压、压力以及流量等信息,故在系统中安装了型号为HSFA/5264 电流传感器、型号为SFHAR-5624 电压传感器,以及IADYH/25564 压力流量传感器,使用伺服电机为三个传感器提供电源,独立电源的设置方便系统电源故障排查。利用USB 接口将传感器与空气压缩机连接,根据实际情况对传感器的采集频率、周期等参数进行设定,考虑到空气压缩机运行数据量较大,为传感器配备32 GB 硬盘,由读卡器自动读取到传感器采集的数据信号,将其存储到硬盘中,由硬盘对数据进行分类存储,供系统计算使用。
2 系统软件设计
2.1 数据采集
采集对象主要包括空气压缩机的出口压力、进口流量、电源电压和电流,传感器输出的出口压力和进口电流信号为0 ~15 V 的电压模拟信号,模拟信号从信号输入端进入,由一级反向加法单元对信号进行压缩处理,再经过一级放大单元对信号进行放大处理,将压力和流量等信号转换成电压信号,其表达式为:

式(1)中,表示信号输入端压力和流量等信号转换后的电压信号;表示原始信号;表示一级反向加法单元对信号的压缩倍数;表示一级放大单元对信号的放大倍数。正常情况下空气压缩机电路信号比较小,需要对其进行放大处理,故对于空气压缩机电路信号的采集,采用信号放大单元对空气压缩机电压、电流进行采集转换,得到空气压缩机输出线路上的电路信号,在空气放大单元内将空气压缩机的额定输入电流和输出电流的比值进行设定,利用该参数限定空气压缩机电路流量,其用公式表示为:

式(2)中,表示空气压缩机电源线路的电流值;表示空气压缩机电路中的母线电压;、表示两个限流电阻。空气压缩机电流经过采样电阻,可以得到空气压缩机二次侧的电压:

式(3)中,表示空气压缩机的二次侧电压值;表示空气压缩机采样电阻值。通过对其进行放大处理,获取到空气压缩机的输出电压信号:

式(4)中,表示经过放大处理后的空气压缩机输出电压信号;表示信号放大单元对信号的放大倍数。
2.2 模糊控制
利用模糊控制法对采集的数据信号进行分析,判断空气压缩机运行状态,从而对其进行模糊控制。假设在同一时间域内,空气压缩机的电流、电压、压力以及流量的数据集分别为、、、,将其与空气压缩机各项参数允许限值进行比对,得到空气压缩机运行偏差量:

式(5)中,表示空气压缩机运行偏差;x、y、g、k分别表示各项参数集合中的最大值;、、、表示空气压缩机各项参数允许限值。利用量化因子将空气压缩机运行误差进行量化处理,其公式为:

式(6)中,H表示量化后的空气压缩机运行误差;表示量化因子。量化后的运行误差范围在0 ~1 内,对量化后的运行误差进行模糊评价,以0.5 作为一个评判界线。如果运行误差超过0.5,则表示空气压缩机运行状态非常差,需要关闭开关,停止运行对其进行检修;如果运行误差小于0.5,则表示空气压缩机运行状态只是轻微的异常,将超出运行标准的参数值进行初始化,保证其正常运行,从而实现对其自动化控制,进而完成系统设计。
3 实验论证分析
实验以某空气压缩机为实验对象,该空气压缩机型号为KADF/56945,利用此次设计系统与传统系统对该空气压缩机进行自动控制。实验准备了一台可编程逻辑控制器、一台压力传感器、一台电流传感器和一台电压传感器,将传感器的数据采集周期设定为0.15 s,采集频率设定为0.26 Hz,将可编程逻辑控制器控制周期设定为0.55 s,控制频率设定为0.34 Hz。实验共采集到2.15 GB 空气压缩机运行数据,通过对数据处理、分析,形成控制指令并执行,具体控制情况如表1所示。

表1 空气压缩机自动控制情况
从表1 中数据可以看出,设计系统空气压缩机自动控制功能可以正常使用,并且能够快速执行所有控制指令。为了进一步验证设计系统的可靠性,实验以鲁棒性和系统数据传输性能作为此次实验指标,鲁棒性是指系统在超负载运行下不死机、不崩溃,实验共分八组,每组实验在前一组运行时间基础上增加12 h,网络过载增加10%,控制指令增加5.5%,每组实验时间为8 h,第一组实验系统连续运行72 h 之后,开始记录8 h 之内系统死机时间,死机时间越长,表示系统鲁棒性能越差,死机时间越短表示系统鲁棒性能越好,利用SFAU 软件测量每组实验中两个系统死机时间,通过该指标对比两种性能鲁棒性,实验数据如表2所示。

表2 两种系统鲁棒性对比
通过对表2 中数据分析可以得出以下结论:设计系统在实验中死机时间比较短,最长死机时间仅为1.41 s,在超负载运行情况下可以将死机时间控制在2 s 以内,说明设计系统具有良好的鲁棒性;而传统系统在实验中死机时间最长已经达到24.16 s,最短死机时间为15.36 s,远远长于设计系统,因此实验结果证明了,设计系统鲁棒性优于传统系统,具有较强的生存能力。
当系统服务器建立连接后,每隔5 s 服务器向传感器发送一个数据采集任务,传感器每次上传数据的字节大小要比上一次增加4 个字节,使用OUAD 软件监测传感器采集数据包上传速率,对系统数据传输性能验证,实验结果如图2所示。
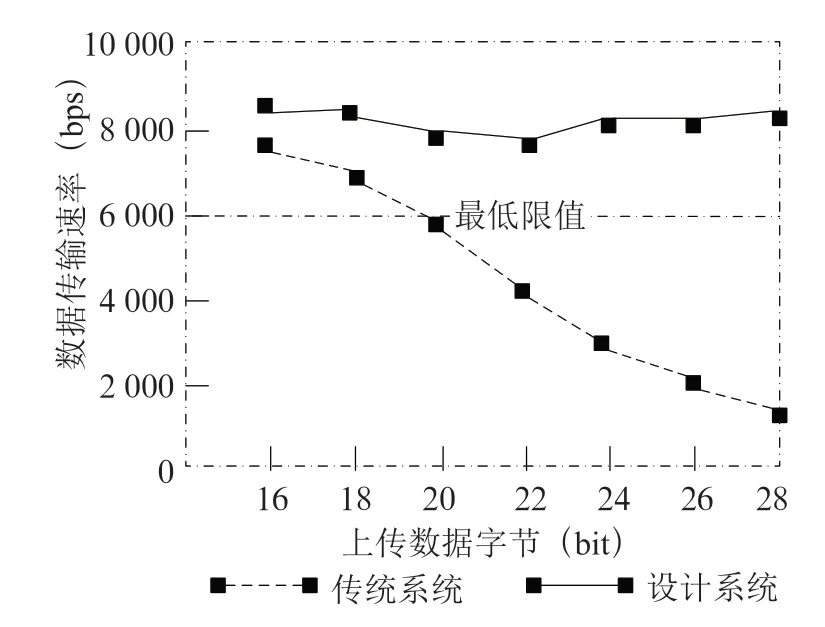
图2 两种系统数据传输速率对比图
从图2 可以看出,随着上传数据字节的增大,设计系统数据传输速度波动变化不大,均在7 500 bps 以上,超出了最低限值,说明设计系统能够快速传输空气压缩机运行数据包;而传统系数数据传输速率会随着数据字节的增大而逐渐减慢,从图2 中两个变化曲线对比,可以明显地看出设计系统数据传输性能优于传统系统,更适用于空气压缩机自动控制。
4 结论
此次在传统系统基础上,应用PLC对空气压缩机进行控制,提出了一个新的空气压缩机自动控制系统设计思路,并通过实验验证了该系统具有较好的鲁棒性,有助于提供空气压缩机控制的自动化水平,同时还有助于提高空气压缩机生产效率,为空气压缩机稳定运行提供了技术保障,具有良好的现实意义。但是由于该系统尚未在实际中大量操作和应用,在某些方面可能存在一些不足之处,今后会对该系统优化和创新方面进行研究,为空气压缩机自动控制提供有力的理论支撑。