无人驾驶智能汽车路径跟踪算法与控制系统的研究
2022-11-03孙小亮
孙小亮
(河南牧业经济学院,河南 郑州 450046)
0 引言
在智能汽车驾驶的跟踪与控制研究中,需要从汽车智能系统的路径跟踪、转向控制、速度控制等方面着手,进行高精确度汽车行驶规范的设计。本文基于智能汽车的传感器、信息接收、底层控制等,进行汽车自动驾驶、速度控制、路径规划、紧急制动的模块分析,从而给出智能汽车在行驶过程中的多种参数控制模型,以保证车辆运行的平稳性与安全性。
1 发展现状
20世纪80年代,我国启动关于智能汽车的研究项目,各个重点高校也针对无人驾驶汽车的自动驾驶、转向控制、路况信息感知等,制作出能够自动化控制的汽车。国防科技大学的智能汽车研究人员,主要通过对普通汽车进行改造,进行智能车辆的行驶路线控制、速度控制。我国国防科技大学设计的无人驾驶汽车,是具有三个轮子的后驱动车,而前轮主要控制车辆的转向。通过以上分析得出,智能汽车包含一系列的传感器装置、决策控制模块等。这一国产三轮车也包含传感器测距、自动驾驶、路线导航与转向控制等模块,各模块之间的协同配合,能够实现对周围环境、道路的感知操作。而在2003、2011年,国防科技大学与一汽公司进行联合,研制出红旗智能驾驶汽车,该无人驾驶智能汽车主要通过摄像头、四线雷达等,进行道路环境信息的感知,摄像头能够采集到车辆的行驶车道、周围环境信息,帮助车辆完成转向角度的控制。然后可以运用GPS 导航功能来获取汽车的位置信息,并对行车路线进行规划,智能汽车的最高时速在140 km/h 左右。而且在行车过程中,车辆里程测量设备,可以实现对智能车行驶车速、里程等的测算与控制。
2 无人驾驶智能汽车的结构与关键技术分析
2.1 智能汽车车体的结构设计
在智能汽车车体的设计过程中,主要包括汽车动力系统、信息感知系统、无线通信系统与控制系统等部分内容。其中在动力系统方面,智能汽车与传统汽车不存在较大差异,电动汽车通常由多个串联的铅酸蓄电池(标压12 V、总压240 V),来提供智能汽车行驶的基本动力。然后智能汽车车体中还装有激光雷达、GPS 定位系统、摄像头、里程计,以及为各种传感设备、智能控制设备提供网络的通信系统。本文主要对以上智能汽车的结构进行介绍。
2.1.1 激光雷达
激光雷达是智能汽车中最重要的传感器之一,其主要负责车身、道路之间的障碍识别,属于周边环境监测设备。我国现阶段智能汽车的障碍监测,通常将单线、四线激光雷达进行结合来使用。智能汽车行驶过程中,激光雷达主动发射用于距离测量的激光,激光碰到障碍物时,会返回到雷达检测的设备,从而计算出智能汽车、障碍物之间的距离。激光雷达对于道路信息的采集,受到外部不稳定因素的干扰较小,在距离测量中的精确度较高。特别是对那些道路标志模糊、路面凹凸不平的地区,激光雷达的环境信息感知效果更好。
2.1.2 GPS 智能定位
GPS 全球定位系统作为最智能的导航系统,被广泛应用到普通汽车、智能汽车的导航与定位中。本文所研究的智能汽车,主要使用NovAtel 公司的惯性导航技术、垂直陀螺仪等,进行实时路况数据信息的采样和接收,一方面确定汽车当下所处的位置,另一方面帮助控制系统完成下一步的驾驶决策。惯性导航技术利用牛顿第二定律,测量汽车行驶过程中的惯性加速度,并进行惯性加速度的积分运算,以求得汽车行驶的转向角度、侧倾角度。
2.1.3 前后行车摄像头
摄像头也是智能汽车的路况传感器之一,其能够完成周围道路、障碍物等的检测。智能汽车包括前摄像头、后摄像头等组成部分,在捕获到车道中的障碍信息后,会将数据传输到控制系统的上位机,由上位机下发后续的操控命令。现阶段使用的摄像头一般为镜王摄像头,其分辨率通常为1280×720、640×480,能满足智能汽车的日常需求。
2.1.4 网络串口通信系统
在智能汽车的网络通信中,通常使用德国BOSCH 公司开发的CAN 总线协议,作为国际智能汽车通信传输的主要协议。CAN 是用于汽车控制系统的局域网络,其能够将搜集与处理后的雷达数据、导航数据、摄像数据等进行整合,并通过局域网来完成汽车数据信息的大范围、快速传播。当前智能汽车主要借助于计算机上的RS232 串口,进行各种字节数据的通信传输,CAN 控制器局域网络在数据传输过程中,具有准确度高、速度快、资源占用少等优势。
2.2 无人驾驶智能汽车的关键技术分析
2.2.1 行车环境感知技术
无人驾驶智能汽车的传感器设备,构成具有环境感知功能的综合系统。在这一系统中,包括激光雷达、GPS 智能定位、摄像头、里程计等软硬件。行车环境感知技术作为外部信息采集、汽车状态调整的技术,其能够完成道路车况、道路标准线、周围障碍等的测量。同时智能汽车的环境感知系统,还可以对车辆自身状况信息进行检测与分析,包括行驶里程、汽车位置、车轮偏转角度、行驶速度等。通过惯性导航、信息传感器等设备的信息获取,可以得到较为可靠的行车数据,以保证复杂路况下的行车安全。
2.2.2 路线规划与决策技术
智能汽车的路线规划与决策层,主要分为路径规划、信息决策两方面内容。通过以上环境感知技术所获得的数据信息,智能规划系统可以对外部环境数据、车辆行驶数据等进行分析,在经过数据信息评估与运算后,其能够设计出最适合当下路况的行驶路径。对于智能车辆运行过程中的路径规划,通常包含局部路径规划、全局路径规划两方面内容。相比于全局路径规划,局部路径规划的车况分析会更加详细,其会根据周围道路环境、汽车位置、局部车况、车辆行驶速度等因素,做出综合的路线决策。而在智能汽车行驶的路线决策完成后,决策模块就会对控制系统下达相应的操作指令,以实现对车体的智能操控。
2.2.3 控制系统
控制系统包括横向控制系统、纵向控制系统,主要对智能汽车的转向、行驶速度、加速度等进行控制。横向控制系统接收到外部环境、行驶路径的规划信息后,会控制车辆处于某一车道内行驶,并躲避来自周围的道路障碍。纵向控制系统则着重于汽车制动、速度等的控制,通常利用PID 控制算法或神经网络算法,进行智能汽车行驶速度的控制。
3 无人驾驶智能汽车转向与车速控制系统的设计研究
3.1 智能汽车转向控制系统的设计
在智能车辆的自动转向过程中,需要助力转向控制系统,来对汽车的方向盘、行驶方向进行控制。现阶段常见的汽车助力转向系统,主要包括机械液压助力、电子液压助力、电动助力等,智能汽车使用电动助力进行转向控制。电动助力转向控制系统,包括扭矩传感器、减速机构、助力电机、电子控制单元ECU、机械转向器等部分。在使用电动助力进行转向控制过程中,电子控制单元ECU 负责整个系统的电路控制。只要车辆方向盘发生转动,扭矩传感器就会向电子控制单元ECU 发送信号。之后电子控制单元ECU 也会发送离合控制信号,来控制助力电机的工作状态,助力电机又会向电磁离合器、减速机构发送控制指令,以保证汽车正常的转向操作。电动助力转向控制系统的实现流程如图1所示。

图1 电动助力转向控制系统的实现
3.2 无人驾驶智能汽车车速控制系统的设计
3.2.1 智能汽车车速底层控制系统的设计
无人驾驶智能汽车的速度控制,分为纵向控制、横向控制两方面内容。纵向控制是智能汽车速度的上层控制,也包含智能汽车速度的底层控制。底层控制在智能汽车速度控制中的功能,是取代驾驶员对汽车的操作,对汽车中的刹车制动系统、油门等进行控制。底层控制主要借助于驱动器,向牵引电机发送相应的控制指令,进行制动器、油门踏板等的控制。在智能车速底层控制系统的设计过程中,油门踏板、牵引电机、油门控制器等设备,通常由多个钢丝绳进行连接。在牵引电机发生转动的情况下,钢丝绳会引发刹车制动器、油门踏板的动作。底层控制系统中存在光电转换器,其能够将输出轴上的机械几何位移量,转换成脉冲或数字量,以实现对牵引电机位置的调试,从而完成对车辆刹车、速度的控制,具体如图2所示。
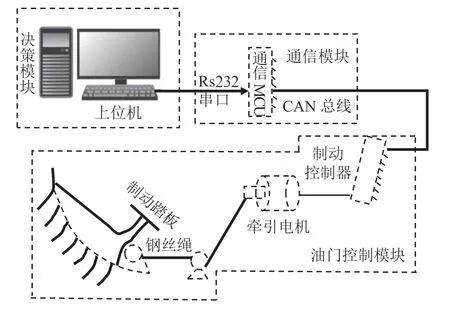
图2 智能汽车车速底层控制系统
3.2.2 智能汽车车速上层控制系统的设计
智能汽车上层车速控制系统,是将汽车刹车制动装置、油门踏板作为单独的控制系统,对其进行分别控制。但在智能汽车行驶的过程中,为减少车身的机械损耗、电量损耗,需要尽可能避免刹车制动、油门踏板系统之间的快速切换。上层车速控制系统对油门、刹车制动的交替控制,需要根据当下汽车速度、加速度,以及其与期望速度的偏差,向底层控制系统发送相应的控制指令。然后底层控制系统会对EPOS2 电机控制器,发送相应的油门控制指令,EPOS2 电机控制器进行油门踏板开启、关闭的角度调节,从而完成对汽车的加速操作。
根据以上油门、刹车制动装置的交替控制规律,进行上层车速控制系统的切换规则制定。在对智能汽车行驶的速度偏差、速度稳定性进行综合考虑后,上层控制系统应对油门踏板的开度进行调整。智能汽车实际速度、期望速度的偏差小于0 的情况下,应对刹车、油门踏板进行减速操作。而在智能汽车实际速度、期望速度的偏差大于某一阈值的情况下,上位机要向EPOS2 电机控制器发送释放信号,对油门踏板进行释放操作,通过刹车制动的调节来完成车辆减速。切换规则公式为:
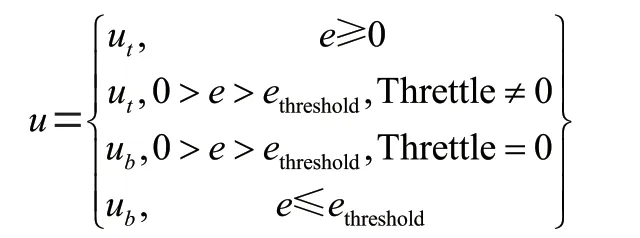
其中:u为刹车制动控制数值;u为油门控制数值;为某一阈值,在≥0 的情况下,上层控制系统会对汽车进行刹车制动控制;在<0、>、Throttle ≠0 的情况下,上层控制系统会对油门踏板的启闭角度进行调节;在<0、>、Throttle=0,以及≤的情况下,上层控制系统会对汽车进行刹车制动控制。
4 无人驾驶智能汽车路径跟踪算法的设计研究
智能汽车路径跟踪系统设计的主要目的,是通过Pure Pursuit 算法、改进Pure Pursuit 算法的运用,进行车辆行驶路线、道路转向等的控制。路径跟踪控制系统存在预先规划好的路径,在车辆行驶路径的跟踪过程中,也存在智能汽车转向的期望转角。但智能汽车在具体的行进中,总会出现实际路径、规划路径之间的偏差问题,这也会导致汽车位置、车体航向角的偏差。因此需要通过智能汽车控制算法、Pure Pur-suit 算法等,对其行驶路径、转向偏角等进行跟踪与修正。
4.1 Pure Pursuit 跟踪算法
Pure Pursuit 车辆路径跟踪算法,主要通过预先规划路径、行驶距离路径之间的偏差计算,进行汽车位置、转向偏角的数据测算,从而完成对某一智能汽车的路径跟踪。Pure Pursuit 路径跟踪算法具有实现简单、数据计算直观等特征,在智能车辆路径跟踪方面有着良好的鲁棒性。Pure Pursuit 路径跟踪算法会将行驶车辆,与车辆后轮驱动轴线进行连接,以形成具有一定曲率的圆弧,具体连接情况如图3所示。
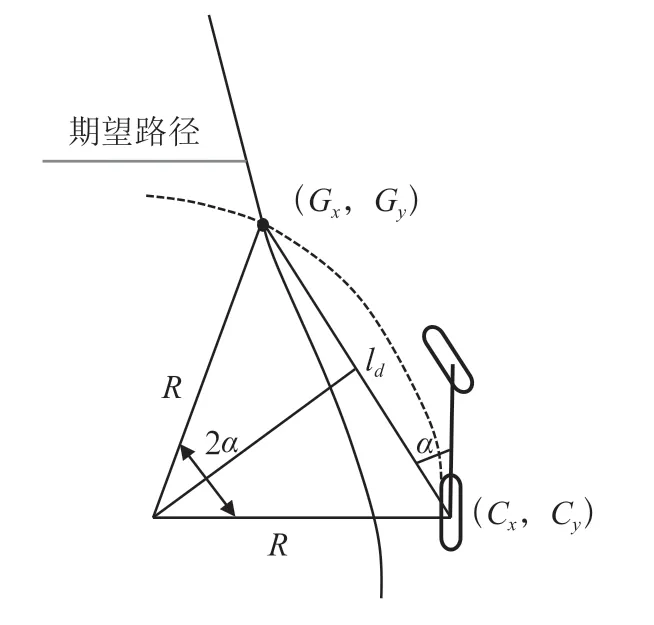
图3 Pure Pursuit 路径跟踪算法
从图中可以得出,(G,G)是行驶车辆的目标点,(C,C)是智能车辆后轮驱动,ld 表示智能汽车目标点、后轴之间的距离,是智能汽车前进向量、预瞄向量之间的夹角,其路径跟踪的实现公式为:


4.2 基于改进Pure Pursuit 算法的路径跟踪

5 结论
智能汽车集合机械制造、计算机信息控制等技术,是国家经济与科技实力的主要体现。我国在无人驾驶智能汽车的研究中,主要借鉴、欧美日本的智能车辆控制系统,来完成汽车的路况信息搜集、路径行驶规划与驾驶速度控制。因此通过以上分析可得出,测距雷达、数据链路天性、摄像头、GPS 接收器等传感器装置,以及规划决策计算机、数据链路控制器、底层控制模块等的配合,能够实现智能汽车的路线跟踪、控制决策,并完成智能汽车行驶过程中的自动控制。