基于线性二次型调节器的汽车横向控制算法研究
2022-11-01彭炳顺张成涛
彭炳顺,张成涛
广西科技大学机械与汽车工程学院,广西柳州 545006
0 引言
近些年,自动驾驶汽车成为各大高校和企业的研究热点,自动驾驶汽车的商业价值以及在未来军事应用领域都有广阔的前景。汽车横向控制作为自动驾驶核心技术之一,研究其算法和控制器的设计具有很强的学术价值和现实意义。汽车横向运动控制主要针对车辆的转向执行系统进行操纵车辆转向的同时,保证自动驾驶汽车沿规划好的路径行驶。目前,横向路径跟踪控制的精确性和稳定性是主要的研究方向,并主要通过与参考路径的横向偏差、前轮转角及其增量的变化率等参数进行评价。由于LQR状态反馈控制在求解过程中没有考虑到路径本身的动态变化特性,LQR控制的车辆在曲线行驶时会存在稳态误差。鉴于此,为了消除该稳态误差,考虑到路径的曲率和车辆的转向不足特性,基于LQR控制设计了前馈LQR控制,利用MATLAB/Simulink和CarSim联合仿真对所设计的前馈LQR控制的有效性和优越性进行了验证。
1 路径跟踪模型
动力学是研究作用于物体的力与物体运动的关系,车辆动力学模型通过研究车辆轮胎及其相关部件的受力情况来分析车辆的平顺性和车辆操纵稳定性。只考虑纯侧偏轮胎特性,忽略轮胎力的纵横向耦合关系和横纵向空气动力学可得到单车模型,如图1所示。

图1 车辆动力学模型
由牛顿第二定律、转矩平衡方程和小角度假设可得汽车二自由度微分方程:
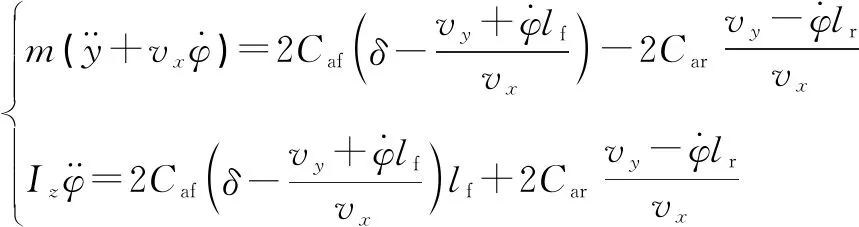
(1)

以横向位置误差、横向位置误差变化率、横摆角误差、横摆角误差变化率作为状态量,可将式(1)转换成误差状态方程为:
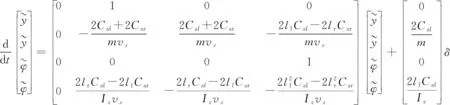
(2)
2 线性二次型调节器控制器设计
LQR控制器是一种依赖被控对象状态空间方程的现代控制方法。基于车辆的轨迹跟踪精度的要求,实现车辆能达到稳定状态并使其车辆跟踪精度最优,又能使车辆控制量较小,选取车辆横向偏差和车辆角度偏差作为优化对象,得到一个理想的前轮转角,使得性能指标达到最小值。

(3)
对式(3)的目标函数优化求解,能解出的最优控制律,是关于状态变量的线性函数:
=-[(+)]
(4)
令=(+),则:
=-
(5)
式中:为半正定的状态加权矩阵;为正定的控制加权矩阵;是黎卡提方程的解,即
=-(+)+
(6)
3 前馈控制器设计
在LQR状态反馈调节器求解过程中没有考虑路径本身的动态变化特性,会存在稳态误差,为了消除稳态误差,在控制中加上前馈控制输入量。计算公式为:

(7)

(8)
式中:为矩阵中的角度偏差反馈控制增益部分;为稳态时的角度跟踪偏差。
4 仿真试验与分析
选用CarSim软件对非线性车辆进行建模。车辆模型主要参数见表1。
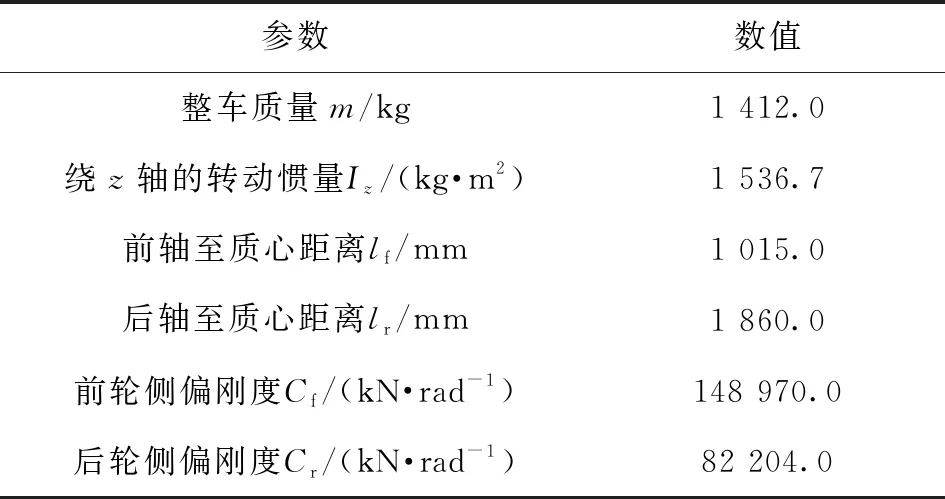
表1 车辆模型主要参数
为了验证LQR控制算法的有效性,研究在30、60 km/h速度下动力学和前馈控制LQR在双移线工况下的轨迹跟踪效果,通过汽车的车辆轨迹、横向位置偏差和横摆角速度来评价和验证算法的有效性。
4.1 30.0 km/h路径跟踪仿真试验分析
设置路面附着系数为=0.9,车辆速度为=30.0 km/h。图2为车辆速度为30.0 km/h的基于动力学LQR控制器和前馈LQR控制器的车辆轨迹、横向位置偏差和横摆角速度变化曲线。由图2a、b可以看出,在低速大转角的工况下,基于动力学LQR控制的横向位置偏差最大值为5.0 cm;基于前馈LQR控制的横向位置偏差的最大值为4.7 cm,前馈LQR的横向误差始终在5.0 cm以内,这说明前馈LQR控制器能够使车辆具有更高的轨迹跟踪精度;由图2c可以看出,前馈LQR的横摆角速度的变化幅度始终小于LQR控制的变化幅度,说明在横向控制时前馈LQR具有更好的平稳性和灵活操作性。综上可见,在低速大转角的工况下前馈LQR控制器在车辆路径跟踪中表现出更好的性能。

图2 车辆速度为30.0 km/h的基于动力学LQR控制器和前馈LQR控制器的车辆轨迹、横向位置偏差和横摆角速度变化曲线
4.2 60.0 km/h路径跟踪仿真试验分析
设置路面附着系数为=09,车辆速度为=60.0 km/h。图3为车辆速度为60.0 km/h的基于动力学LQR控制器和前馈LQR控制器的车辆轨迹、横向位置偏差和横摆角速度变化曲线。由图3a、图3b可以看出,在60.0 km/h的速度下,基于LQR控制器和前馈LQR控制器的横向位置偏差的最大值分别为7.8、5.3 cm。采用前馈LQR控制器,横向位置偏差降低了32.0%;由图3c可以看出,采用前馈LQR控制器的车辆横摆角速度收敛到稳态值的响应更快,这意味着所设计的控制器具有更好的操作灵活性。前馈LQR控制器对车辆行驶状态具有更好的适应性。
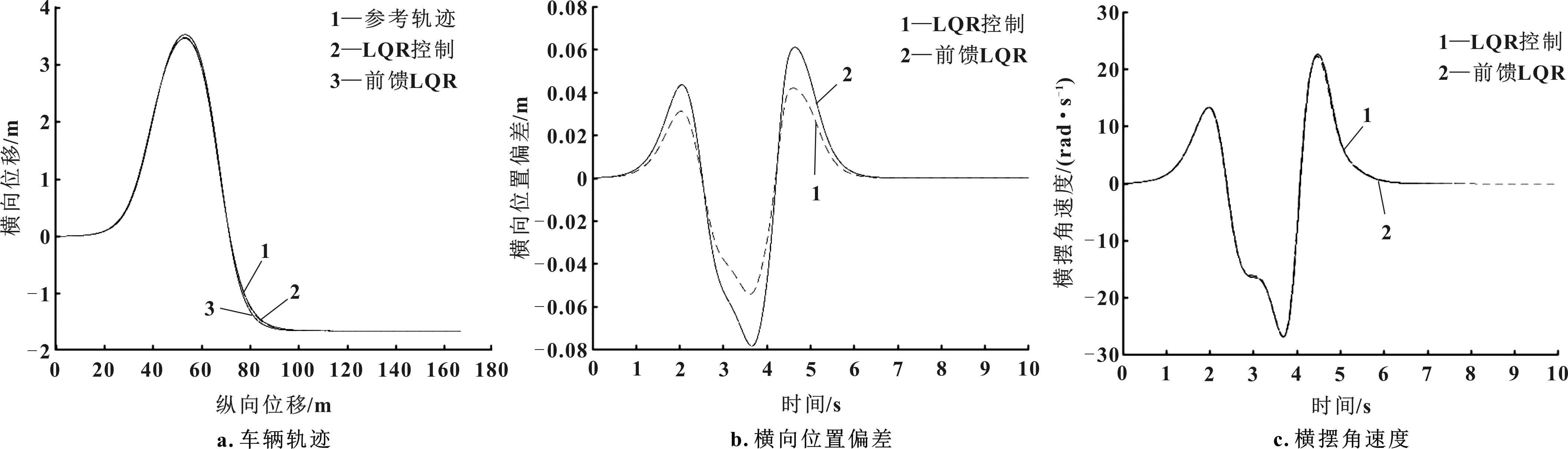
图3 车辆速度为60.0 km/h的基于动力学LQR控制器和前馈LQR控制器的车辆轨迹、横向位置偏差和横摆角速度变化曲线
对比两种控制器的控制效果可以发现,LQR控制器在30.0 km/h的双移线工况下和前馈LQR控制器的控制效果差别不大;但是在60.0 km/h的双移线工况下,前馈LQR控制器在转弯处明显比LQR控制器有更好的轨迹跟踪效果。这是由于LQR状态反馈控制在求解的过程中没有考虑路径本身的动态变化,在曲线行驶时会存在误差。
5 结束语
本文在LQR控制算法上研究智能汽车轨迹跟踪控制,基于动力学设计了LQR控制器和带有前馈控制的LQR控制器。仿真结果表明:无论是在中速还是低速的大转角场景下,所设计的前馈LQR控制器均可以保证具有优越的控制效果;通过观察不同速度下的横摆角速度,所设计的前馈LQR控制器比LQR控制器具有更优的稳定性,提升了驾驶舒适性。
