风力发电机组分段塔架加阻技术研究
2022-10-15王瑞良聂方正
闵 睿 王瑞良 孙 勇 杨 翀 聂方正
(1.浙江运达风电股份有限公司,浙江杭州 310012;2.浙江省风力发电技术重点实验室,浙江杭州 310012)
0 引言
随着我国碳达峰、碳中和方针的制定,电力行业积极响应,风电行业迅速发展[1],风力发电等清洁能源将逐步代替传统的火力发电。要提高风力发电机组发电量,增加叶片长度和塔架高度是较好的技术手段,但塔架振荡带来的风险也随之加大[2]。采用塔架加阻技术,可以有效降低振荡带来的危险性,但同时机组的极限载荷也会增大,导致风力发电机组设计难度增大,设计成本增加。
为解决这一两难问题,本文提出了一种分段塔架加阻的方法,在额定风速附近保持加阻不变,风速越高,加阻效果越小,在切出风速附近去除塔架加阻。此方法能有效降低DLC1.4大风工况塔底合弯矩和轮毂合弯矩的极限载荷,起到降本增效的作用。
1 塔架加阻随风速变化作用分析
1.1 塔架频率滤波器
塔架频率是风机塔架的固有频率,如果塔架频率与机组的其他模态频率接近,如叶轮的转动频率,就会产生共振,进而影响风力发电机组的安全性[3]。为避免振荡的发生,目前应用最多的方法是在变桨环控制器中加入塔架频率滤波器[4]。
塔架频率滤波器采用陷波滤波器,可以在塔架频率点迅速衰减输入信号,从而达到阻碍塔架频率信号通过的作用[5],其传递函数如下:
对于塔架频率滤波器来说,ω1=ω2=塔架固有频率,默认阻尼比ζ1=0.1,ζ2=0.3。
1.2 额定风速附近塔架滤波器的影响
在额定风速附近,不加塔架滤波器的阶跃响应曲线如图1所示。
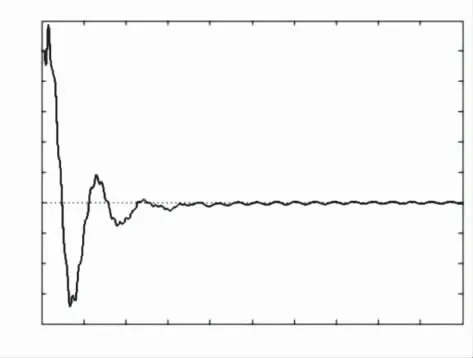
图1 额定风速附近不加塔架滤波器的阶跃响应
额定风速附近不加塔架滤波器,阶跃响应曲线振荡明显,振荡频率就是塔架频率,调节时间长,100 s后才能达到稳定状态,影响机组稳定性。
在额定风速附近,加塔架滤波器的阶跃响应曲线如图2所示。
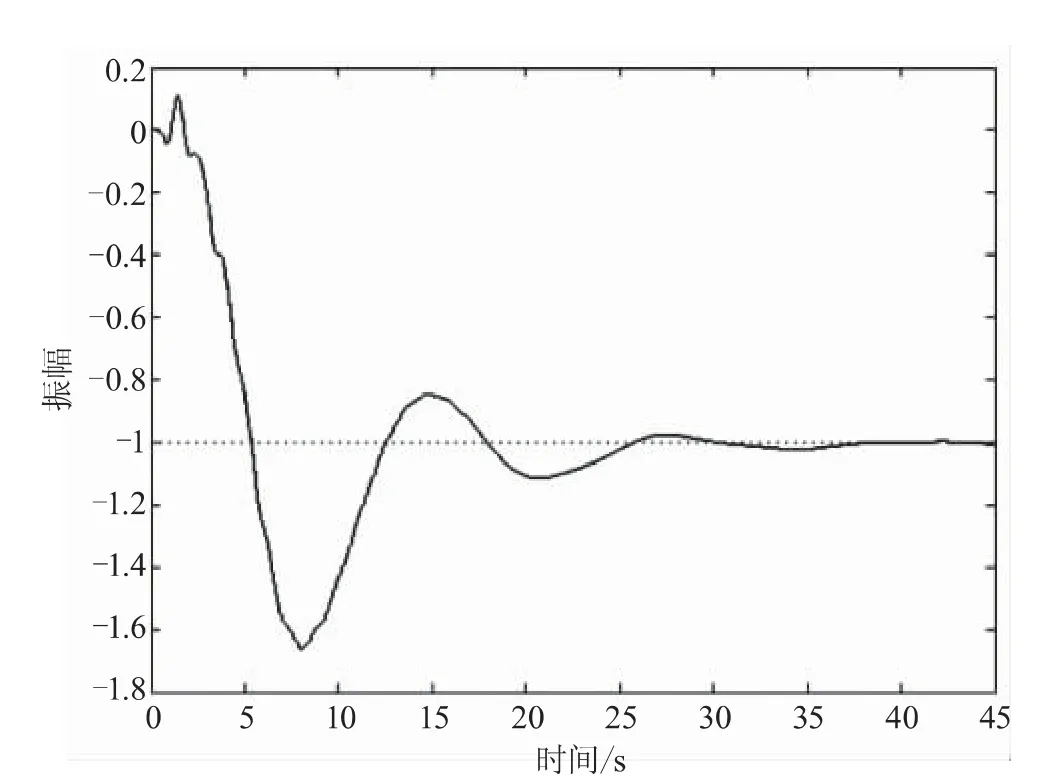
图2 额定风速附近加塔架滤波器的阶跃响应
额定风速附近加塔架滤波器,振荡频率被滤波器过滤掉,阶跃响应曲线平稳,调节时间较短,45 s即可达到稳定状态。
对比得出,在额定风速附近,塔架滤波器对于机组的稳定性起到关键作用,不可去除。
1.3 切出风速附近塔架滤波器的影响
在切出风速附近,不加塔架滤波器的阶跃响应曲线如图3所示。
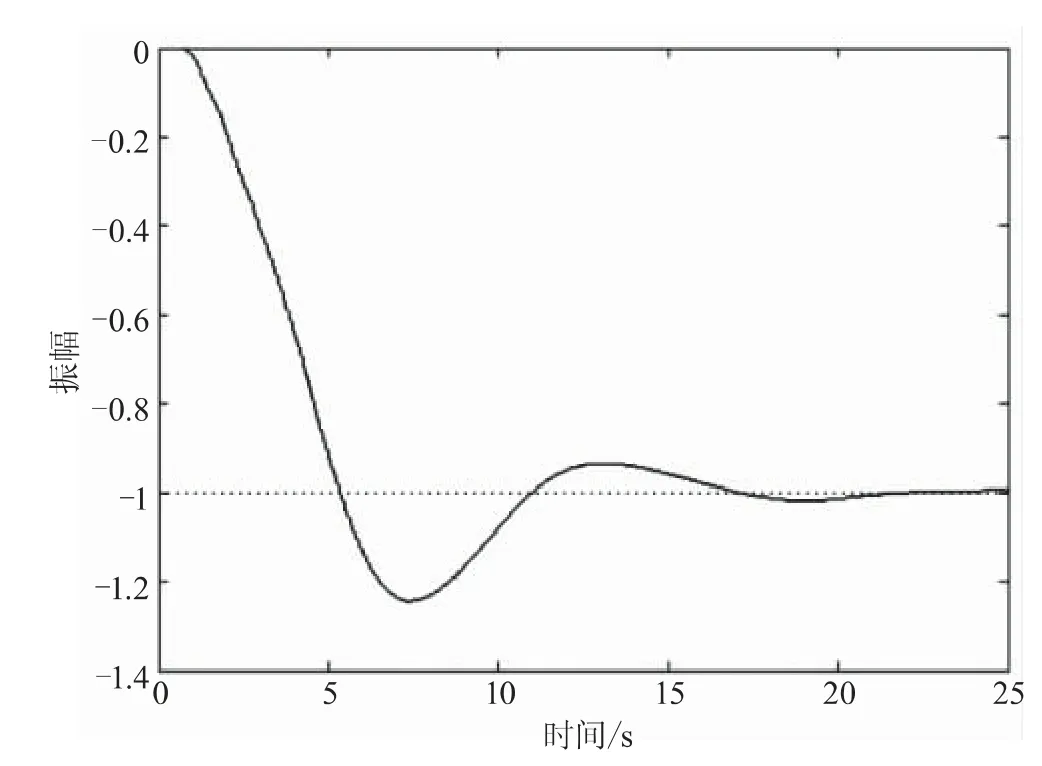
图3 切出风速附近不加塔架滤波器的阶跃响应
切出风速附近不加塔架滤波器,阶跃响应曲线仍然平稳,调节时间很短,25 s即可达到稳定状态。由此可见,此时塔架频率对机组稳定性基本没有影响,在切出风速附近可以去除塔架滤波器,因此分段加阻具备可行性。
2 分段加阻缓冲设计
分段加阻是指在塔架滤波器影响较大的额定风速附近保留塔架加阻,在塔架滤波器影响较小的切出风速附近去除塔架加阻。如果直接按风速或桨距角判断是否开启塔架滤波器,切换时的突变可能会造成振荡,而且临界值附近的频繁切换会产生更大的载荷。因此,引入加阻缓冲的概念,增加变量DynamicFilterScheduleEnabled,为动态塔架滤波器查表使能变量,增加查表Dynamic FilterSchedule,如表1所示。
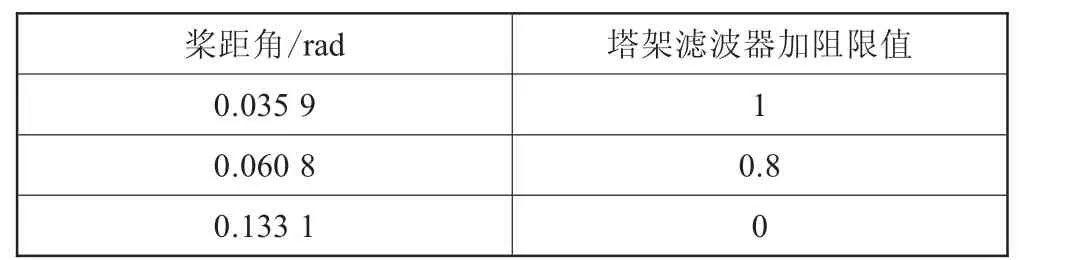
表1 动态塔架滤波器查表格式
DynamicFilterSchedule包含桨距角和塔架滤波器加阻限值两个变量,通过查当前桨距角的值,输出塔架滤波器加阻限值,幅度在0~1倍,限值1时维持初始塔架滤波器阻尼不变,限值减小,塔架滤波器阻尼也按比例减小。如桨距角为0.035 9 rad或以下时,按初始塔架滤波器阻尼ζ1=0.1,ζ2=0.3设置;桨距角为0.060 8 rad时,阻尼为ζ1=0.08,ζ2=0.24;桨距角为0.133 1 rad或以上时,阻尼ζ1=ζ2=0,塔架加阻去除。
用桨距角定位加阻限值要优于用风速定位:首先,风速测量准确性不如桨距角的测量,且有一定延迟;其次,变桨环的PID控制器参数也使用桨距角查表,与PID查表保持一致便于PID控制器调参与分段加阻的统一。
加入分段加阻缓冲后,塔架加阻的切换更平缓,不会激起振荡,而且加阻限值可以根据不同机组设置适宜的数值,适用性更广。
3 分段塔架加阻功能验证
塔架加阻对机组极限载荷影响较大,DLC1.4工况轮毂和塔架的极限载荷一般增加8%~15%,除塔架加阻本身带来的影响外,加阻后变桨环PID控制器参数的相应调整也会增大极限载荷。
以某机型作为验证实例,该机型DLC1.4ca-2工况旋转轮毂坐标系合弯矩Myz和塔底合弯矩Mxy有降载需求,在其他控制策略不变的情况下,仅采用分段塔架加阻方法降载。
塔架频率ω1=ω2=1.18,阻尼ζ1=0.1,ζ2=0.3,调整前变桨环PID控制器参数查表如表2所示。
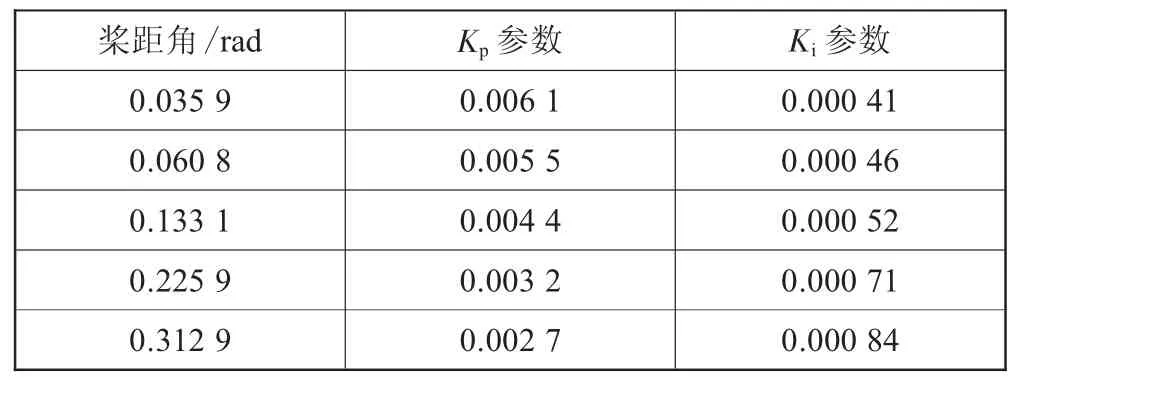
表2 调整前变桨环PID控制器参数查表
动态塔架滤波器查表按表1数据设置,将动态塔架滤波代入PID控制器重新调参,对大风下的参数进行相应调整,调整后的变桨环PID控制器参数如表3所示。
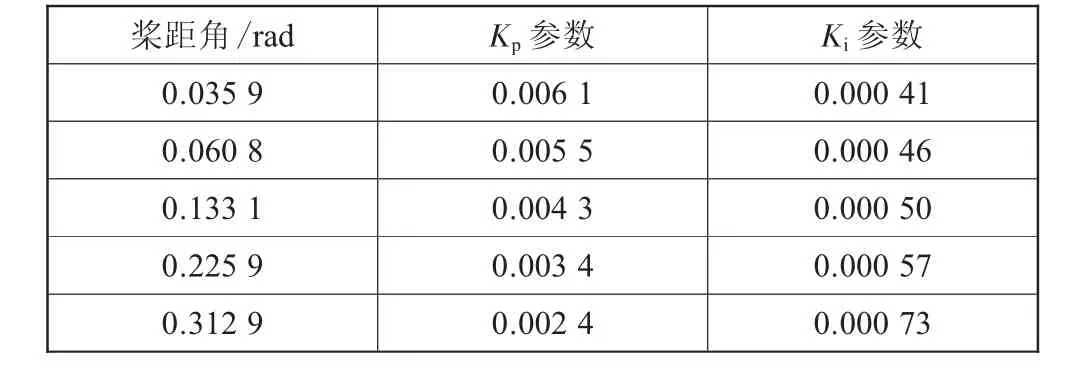
表3 调整后变桨环PID控制器参数查表
用新的控制器重新试跑DLC1.4ca-2工况,旋转轮毂坐标系合弯矩Myz优化前后的对比如图4所示。
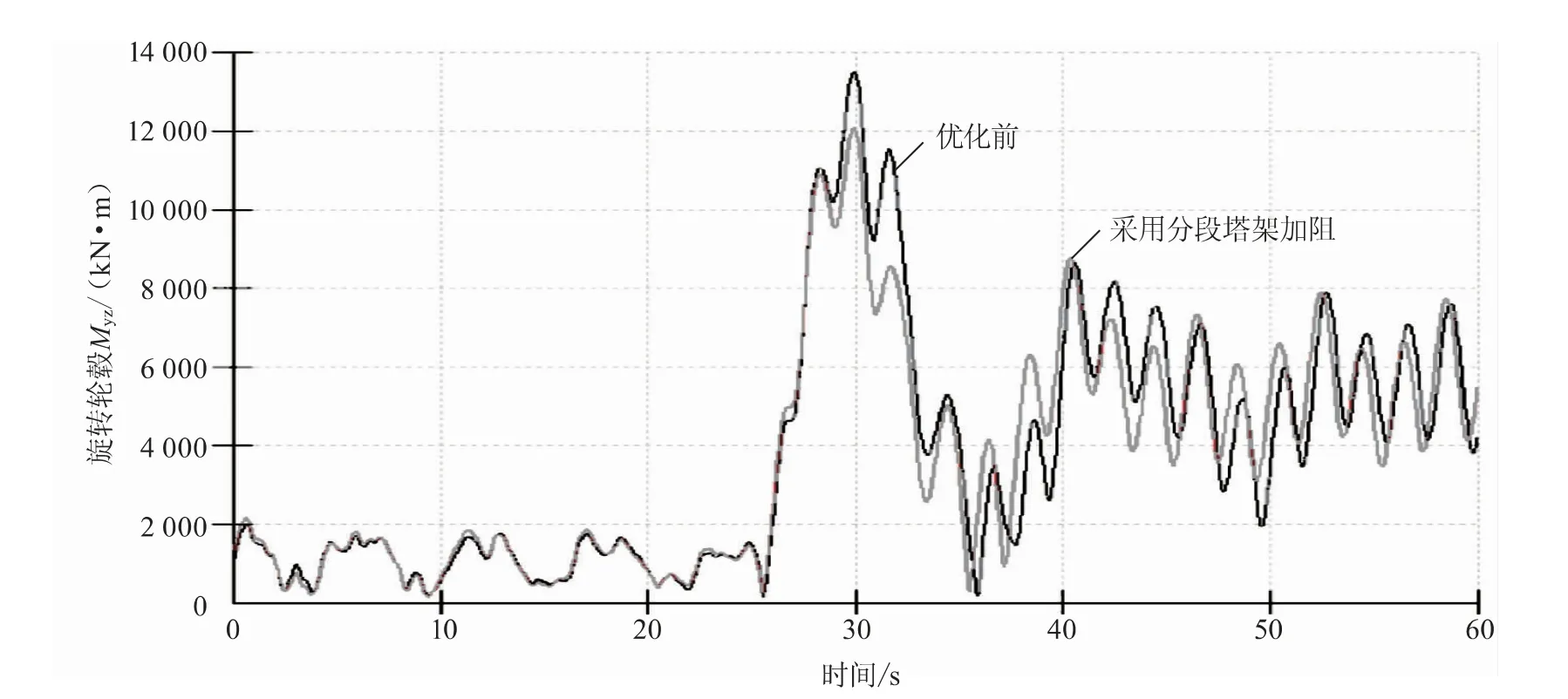
图4 旋转轮毂Myz优化前后对比
黑线为优化前的旋转轮毂Myz,灰线为应用分段塔架加阻优化后的旋转轮毂Myz,极值降载约11.9%,效果明显。
塔底合弯矩Mxy优化前后的对比如图5所示。
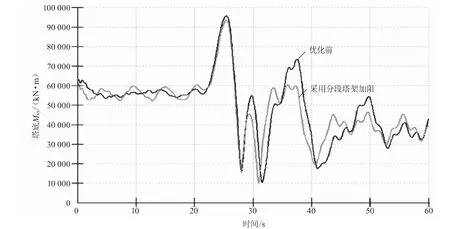
图5 塔底Mxy优化前后对比
黑线为优化前的塔底Mxy,灰线为应用分段塔架加阻优化后的塔底Mxy,降载约2.3%,效果不如旋转轮毂Myz,但也有两个点以上的降载效果。轮毂和塔架的降载具体数值如表4所示。
用其他机组做分段塔架加阻的功能测试,多数机组在DLC1.4大风工况下,塔架和轮毂有不同程度的降载效果,降载范围在1.5%~12%,可以实现降本增效,验证了分段塔架加阻的实用性和通用性。
4 结语
目前风力发电机组需要利用塔架加阻技术避免塔架频率的共振,但加阻带来了极限载荷大的困扰。本文针对这一两难问题,结合塔架频率在不同风速下对机组的影响,提出了分段塔架加阻的方法,并设计了加阻缓冲。本文技术手段能够有效地降低在风速较大工况下轮毂和塔架的极限载荷,并具有通用性。
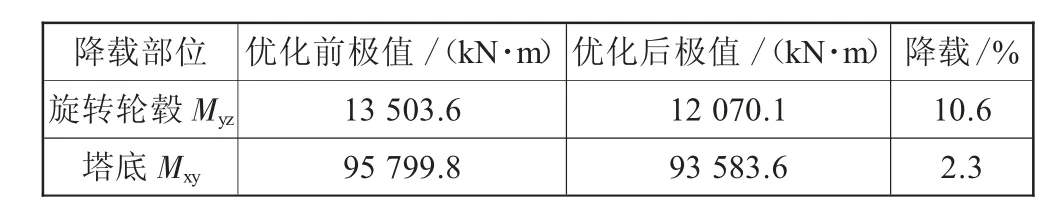
表4 轮毂和塔架优化前后对比表
