光谱模型结合面向对象法的山区水体提取
2022-10-13董哲王凌朱西存冯文斌张美霞
董哲,王凌,朱西存,冯文斌,张美霞
(山东农业大学 资源与环境学院,山东 泰安 271000)
0 引言
山区地表水体影响着山区的生态系统和人类的生产劳动,快速、大范围地获取山区水体的分布情况对于山区的灾害评估、用水安全保障、资源分配有着重要的意义[1-2]。山区水体分布零散,面积相对较小,且易与山地阴影相混淆,在水体的提取上存在一定的难度。遥感作为采集地球数据以及变化信息的手段,已经广泛应用于国民经济和社会发展的各个领域[3],也成为获取水体真实范围的一个可行手段[4]。中低分辨率遥感数据很难用于高精度山区地表水体的提取,而高分二号(GF-2)作为我国第一颗分辨率为亚米级的光学遥感卫星[5],为获取更真实、更丰富的地表水体信息提供了可能。
针对遥感影像的水体提取,国内外学者进行了大量的研究。目前遥感影像水体提取最常用的方法是水体指数法[6],通过分析水体的光谱特征选取相关波段构建水体指数,并给定相关阈值来进行水体提取[7]。Mcfeeters[8]根据植被和水体的反射不同构建归一化差异水体指数(normalized difference water index,NDWI),该指数突出了水体信息,可以很好地提取水体,但会造成阴影与水体的混淆,形成的噪声降低了水体提取的精度。马吉晶等[9]通过浊水指数对兰州市安宁区湿地公园进行了浑浊水体提取,证明浊水指数对区分浑浊水体的效果较好。郑逢斌等[10]利用决策树法,结合最大似然法、单波段阈值法和城区水体阴影指数(urban shadow water index,USWI)提取了安阳县彰武水库的水体,结果表明该方法的水体提取精度比NDWI高。
面向对象法也是一种常见的遥感信息提取方法,它能够利用更加丰富的地物信息,同时还具有良好的抗噪能力。相较于水体指数法,面向对象法可以减少“椒盐现象”的出现[11],能更好地利用高分辨率影像丰富的信息,使得面向对象方法提取水体信息更加符合实际,很好地弥补水体指数法的缺陷。付勇勇等[12]基于面向对象法,采用分离阈值法建立提取规则,实现杭嘉湖水网平原水体的提取,总体精度达到97.3%。王俊海等[13]通过统计简单的光谱信息、纹理特征,利用面向对象法提取扬州市某区域的水体,精度为89.55%,很好地区分了水体和建筑物阴影,表明该方法在城区水体提取方面的有效性。
上述水体提取实例均基于GF-2影像。目前的GF-2水体提取研究多数针对平坦区域,而针对地势起伏较大的山区进行的水体提取却较少。面向对象法提取水体需要进行复杂的计算才能得到最优的分割参数,用以保证水体边界提取的正确性[14]。受限于GF-2仅有蓝、绿、红、近红外4个波段,无法构建出需要中波红外波段的改进归一化差异水体指数(modified normalized difference water index,MNDWI)、水体指数2015(water index 2015,WI2015),以及自动水体提取指数(automated water extraction index,AWEI)等提取效果较好的水体指数。
基于上述考虑,本文在NDWI指数的基础上,提出差异水体光谱模型(difference water spectral model,DWSM),通过与面向对象法结合,旨在为大范围山区水体的提取提供一种更加准确的方法,简化复杂计算。
1 研究区概况与数据来源
1.1 研究区概况
研究区为山东省泰安市泰山的主体区(117°0′E~117°10′E,36°12′N~36°20′N),最高海拔1 532.7 m,高差达1 200 m以上,地势起伏较大,属于暖温带季风气候,具有明显的气候垂直差异,山脚年均气温13.2 ℃,年均降水量678.5 mm;山顶年均气温5.9 ℃,年均降水量1 031.3 mm。水体分布较离散,包括横岭后、曹家庄、药乡附近面积较大的水库及一些零散分布的坑塘。地表景观主要包括大范围的林地、分布在山脚四周的耕地及裸地、零散分布的水体及建筑用地。
1.2 数据来源
选用2017年11月8日分辨率为4 m的GF-2多光谱影像作为实验影像。同时,为验证本文方法的普适性,以2018年6月23日的GF-2多光谱影像作为验证影像,两期影像的云覆盖率均为0%。利用Erdas Image对实验影像和验证影像进行预处理,包括正射校正、影像匹配、图像裁剪,其中正射校正总体误差小于0.3个像元。
2 研究方法
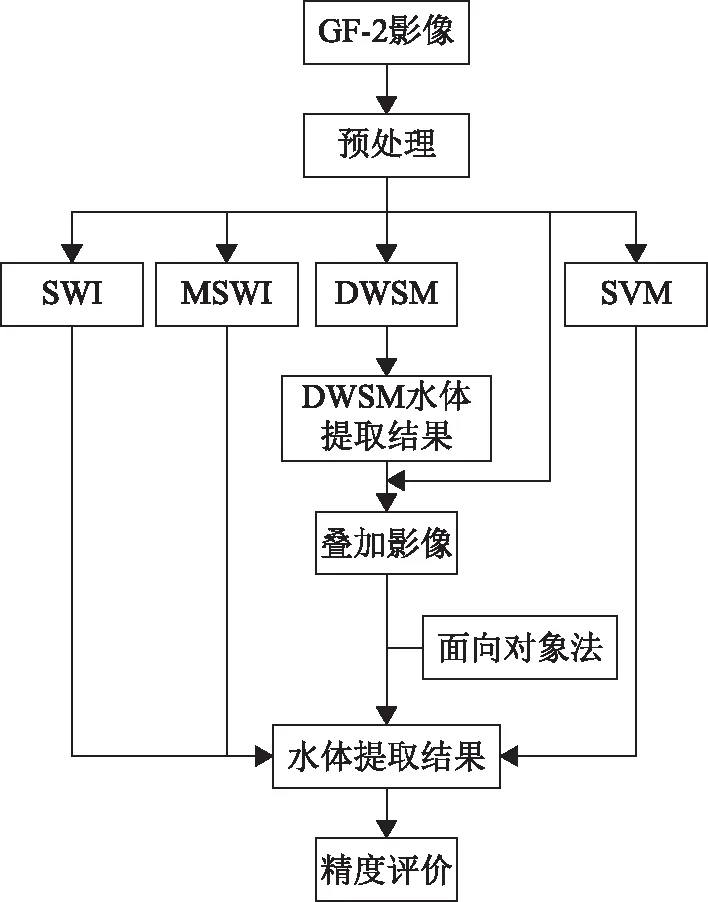
图1 水体提取技术路线
本文技术路线如图1所示,采用差异水体光谱模型结合面向对象法作为水体提取方法,将阴影水体指数(shade water index,SWI)决策树法[15]、改进的阴影水体指数(modified shade water index,MSWI)决策树法[16]和支持向量机法(support vector machine,SVM)作为此方法的对照方法。
2.1 DWSM结合面向对象法
NDWI利用水体在近红外波段反射弱、在绿光波段反射强的特点,基于上述两波段构建归一化差异指数来突出水体信息,表达如式(1)所示。
(1)
式中:Green为绿光波段DN值;NIR为近红外波段DN值。NDWI可以抑制植被和土壤信息,但会混淆水体和阴影[17],这种情况在山区尤为严重,地形起伏较大的山区不仅存在大面积的山体阴影,也存在零散分布的建筑物阴影,使得山区水体提取难度变得更大。为更加准确地提取水体,本文基于NDWI指数提取水体结果掩膜后的实验影像,选取24 978个水体像元和27 956个阴影像元进行对比分析,其中水体主要包括研究区的水库和坑塘,阴影包括建筑物阴影和山体阴影,分别统计水体和阴影DN值在4个波段像元的频率,如图2所示。从图2可以看出,相较于绿光、红光和近红外波段,水体-阴影在蓝光波段的DN值重叠范围最小,这表明在选取合适阈值的前提下,水体-阴影在蓝光波段有较好的区分度。为了进一步扩大水体-阴影的区分度,构建差异水体光谱模型DWSM,表达如式(2)所示。
(2)
式中:Blue、Green、NIR分别为蓝光波段、绿光波段、近红外波段的DN值。
利用与图2相同的方式在DWSM影像中选取水体像元和阴影像元,构建出的水体-阴影对比频率如图3所示。从图3可以看出,当分割阈值为119时,水体和阴影具有良好的区分度,但仍有1.14%(319个像元)的阴影被错分为水体,将继续利用面向对象法剔除这部分阴影噪声。
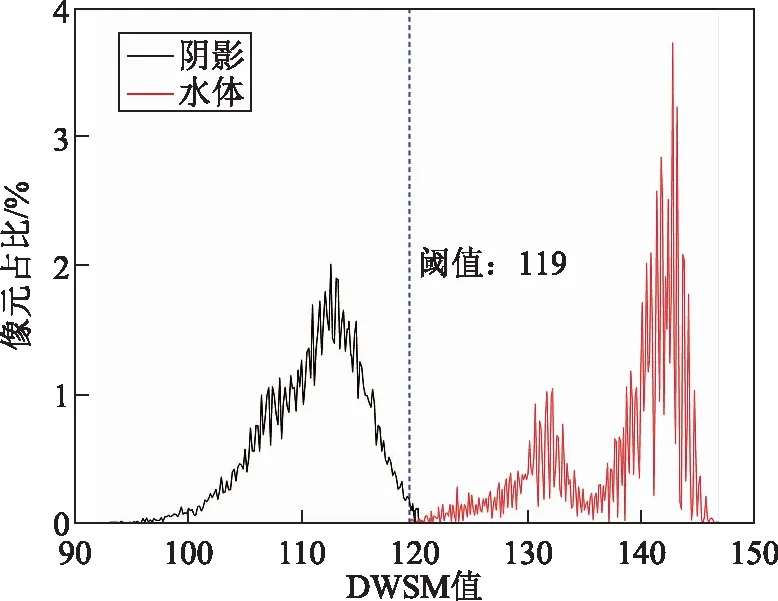
图3 水体-阴影DWSM值频率图
面向对象水体提取方法包括影像分割和水体提取规则建立两个步骤。影像分割最终目的是满足异质性标准,规则集的建立主要依靠光谱特征、形状特征以及纹理特征3个方面[18]。
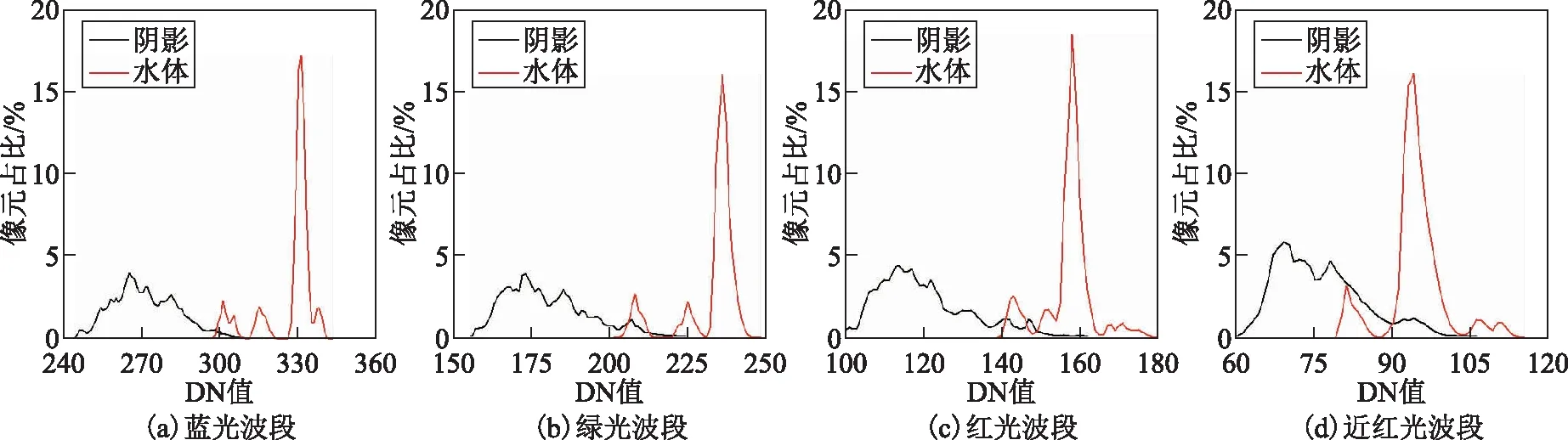
图2 4个波段水体-阴影DN值频率图
1)面向对象的多尺度分割。根据研究区水体形状不规则、大小不一的特点,选取多尺度分割法[19]作为影像分割方法,用以提取水体分布信息。分割参数会影响图像分割的质量,进而直接影响到面向对象的分类精度。本文将DWSM水体提取结果作为第5波段与原始GF-2 4个波段叠加,选取DWSM水体提取结果范围内的影像用于分割,每个波段的权重均为1。通常情况下,影像的最优分割尺度难以把握[20],需要进行繁杂的计算。而本文以DWSM所提取的水体区域作为影像分割范围,在忽略背景0值的情况下,水体是独立存在的,不与其他地物相邻,要区分的类别只有水体和零散阴影两类,且要剔除的阴影较NDWI法少,利用简单的“试错法”可以很快地找到合适的分割尺度。经过实验,当尺度参数为50,形状因子为0.1,紧实度因子为0.3时,分割效果较好,不论是水库还是坑塘,分割情况都符合实际,没有出现水体与其相近的阴影区域分割到同一对象的情况,分割后的对象具有高度均质性。分割后的影像及细节如图4所示。
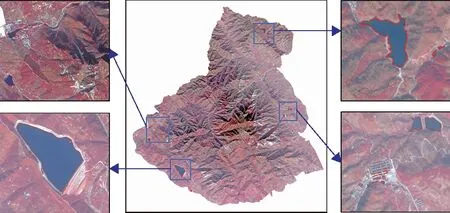
图4 尺度为50的分割图及细节(R:NIR;G:Red;B:Green)
2)规则建立。综合考虑研究区内水体分布较为零散、面积相对较小且轮廓不规则的特点,同时兼顾水体在不同波段的特性,经多次实验,本文选用水体强反射的蓝波段、水体强吸收的近红外波段和DWSM水体提取波段分别构建比值率(ratio)、均值(mean)、亮度值(brightness)3种光谱特征值作为水体提取的规则。
在分割后的影像中尽可能均匀地选取水体和阴影训练样本,创立训练样本集,从而得到水体提取规则值域。实验影像水体提取规则范围如表1所示。
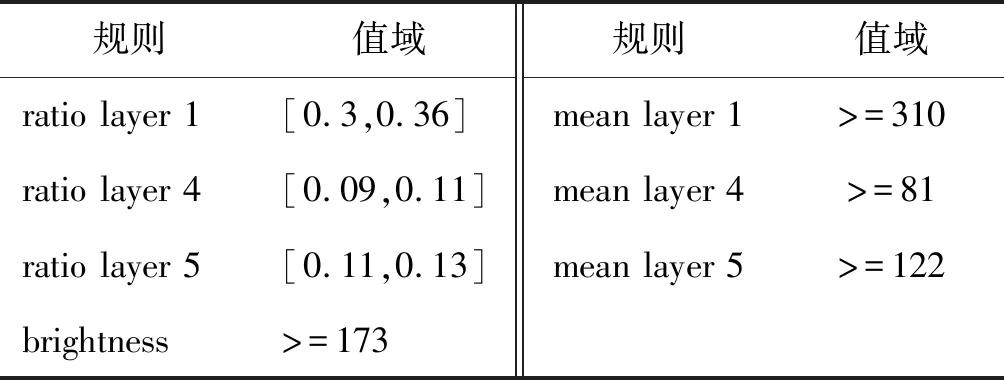
表1 实验影像规则值域
2.2 对照方法
1)决策树法。SWI决策树法、MSWI决策树法是基于GF-1影像提出的水体提取算法,这两种决策树法都是先利用水体在近红外波段的强吸收性的特点,通过设定阈值在近红外波段实现水体粗提取,再利用SWI、MSWI分别实现水体的精确提取。SWI、MSWI的计算如式(3)和式(4)所示。
SWI=Blue+Green-NIR
(3)
MSWI=(Blue-NIR)/NIR
(4)
式中:Blue、Green、NIR分别为蓝光、绿光、近红外波段的DN值。
2)支持向量机法。支持向量机法是建立在统计学习理论基础上的机器学习方法[21]。SVM分类法的精度主要取决于核函数类型的选择和核函数参数的设置[22]。研究表明,在选取合适的核函数类型和参数的前提下,即使选取样本数量较少,SVM分类也能取得较高的精度[23]。本文借鉴段秋亚等[24]的研究,选用径向基核函数(radial basis function,RBF)和对应默认的参数(gamma为0.25;penalty为100;pyramid为0)进行GF-2影像水体信息提取。
2.3 精度评价
选取400个水体点位和400个非水体点位,利用混淆矩阵计算总体分类精度(overall accuracy,OA)、Kappa系数作为各种水体提取方式的精度评价指标。
3 结果分析
3.1 NDWI与DWSM提取结果对比
NDWI与DWSM水体提取结果对比如图5所示。NDWI法混淆了水体和阴影,形成大量的噪声;DWSM法可以很大程度上避免这种情况,在高低起伏的山区提取水体的效果更好,在基本剔除阴影的同时,保留完整的水体信息,但也存在一些阴影像元错分,使得影像存在椒盐现象,原因在于这些阴影和水体在4个波段的光谱特征极为相似,单纯地利用波段之间的数学运算难以找出阴影和水体之间的区别,因而结合面向对象法是必要的。
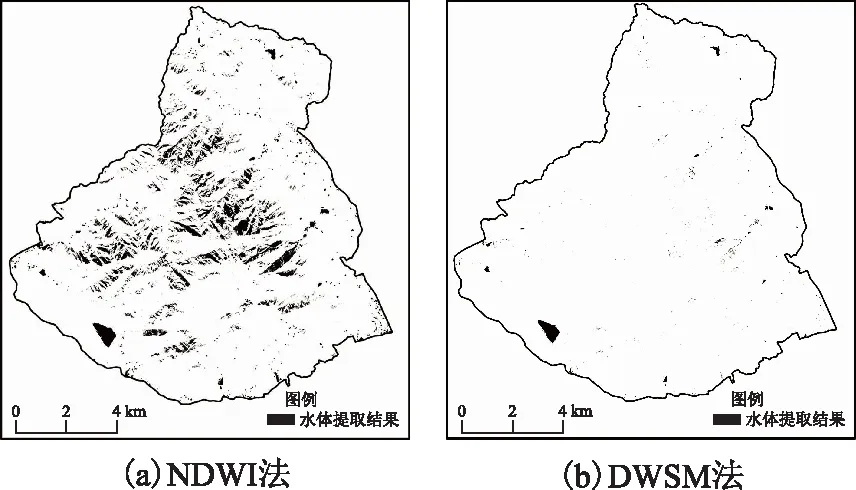
图5 NDWI法与DWSM法水体提取结果
3.2 本文方法与对照方法的结果对比
实验影像和验证影像水体提取结果分别如图6和图7所示,红圈是错分的山体阴影,蓝圈是错分的建筑物阴影。其中,图7结果只展示精度较高的SVM法和DWSM结合面向对象法。不同方法的水体信息提取精度评价见表2。
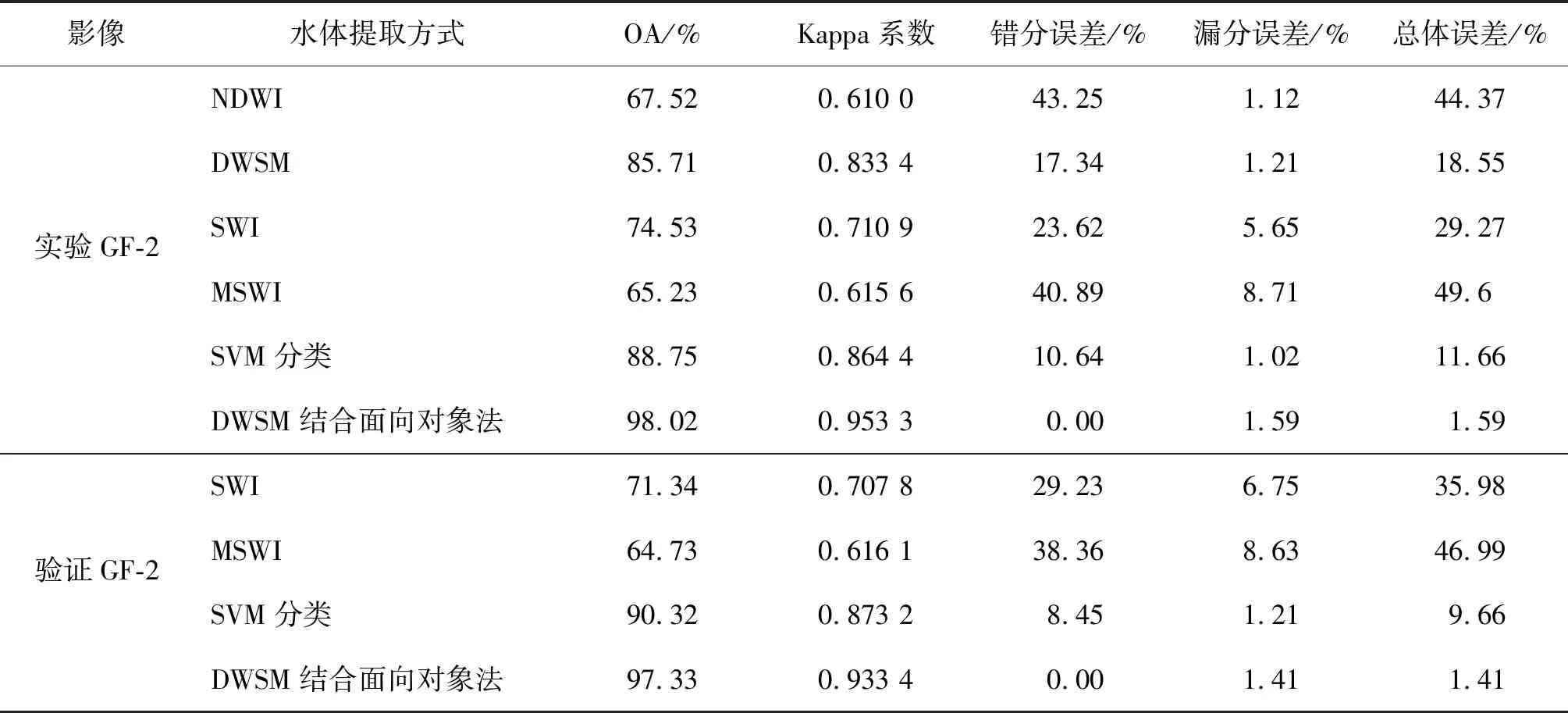
表2 水体提取精度评价结果
由表2可知,无论是在实验影像还是验证影像中,4种水体提取方法的总体精度和Kappa系数由高到低均为DWSM结合面向对象法、SVM分类法、SWI决策树法和MSWI决策树法。DWSM结合面向对象法的Kappa系数和总体分类精度均高于其他算法,且水体提取精度较为稳定。实验影像和验证影像的总体分类精度均大于95%,Kappa系数分别为0.953 3和0.933 4。DWSM结合面向对象法在两幅影像中的漏分误差分别为1.59%和1.41%,错分误差均为0%,总体误差最低。该方法不仅可以很好地区分水体和其他易混地物,而且也能较为精准地提取细微水体,并未出现严重的水体漏分情况,在保证水体信息完整性的同时,减少椒盐现象的发生(图6、图7)。
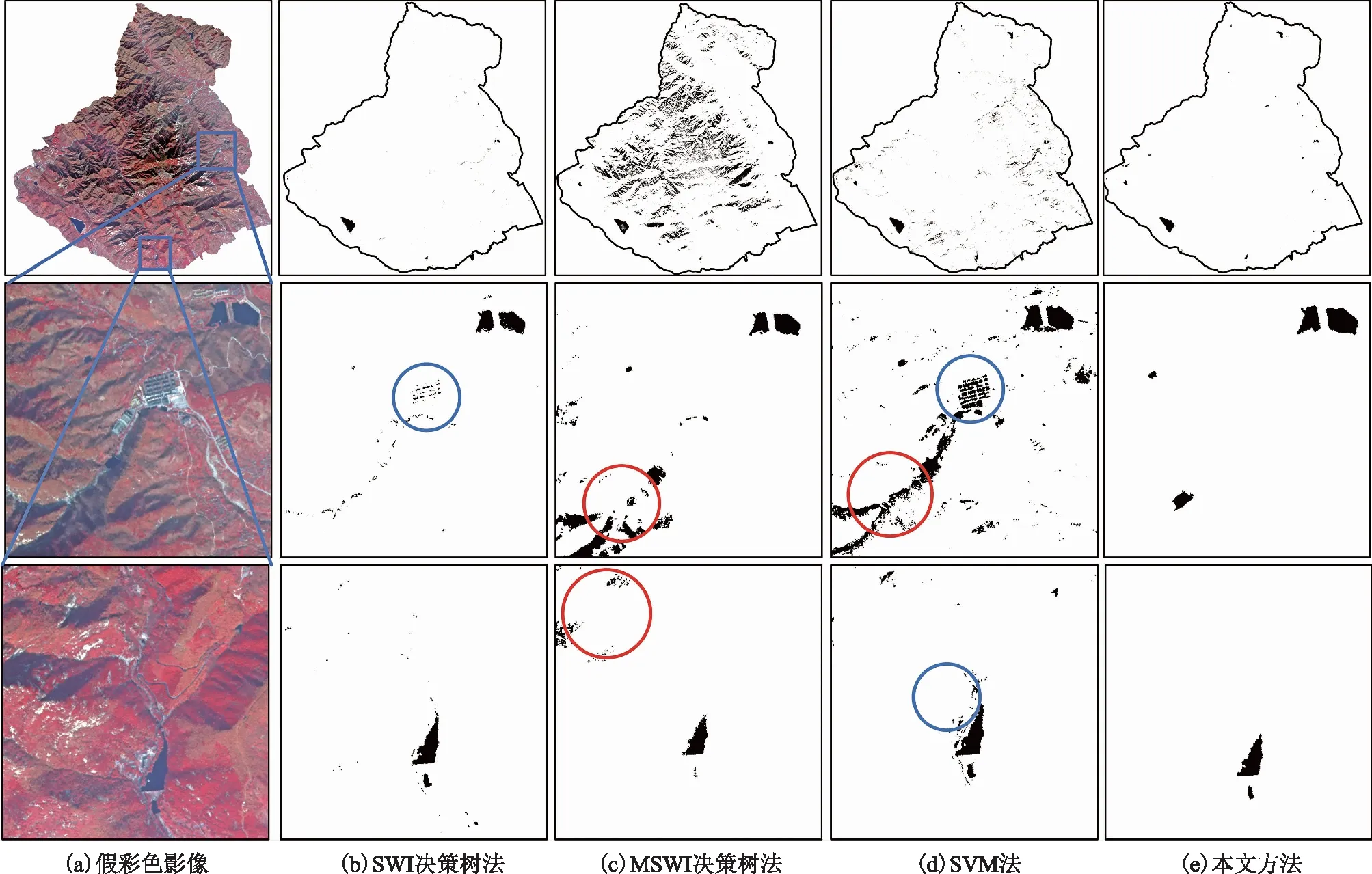
图6 实验GF-2影像水体提取结果及细节对比
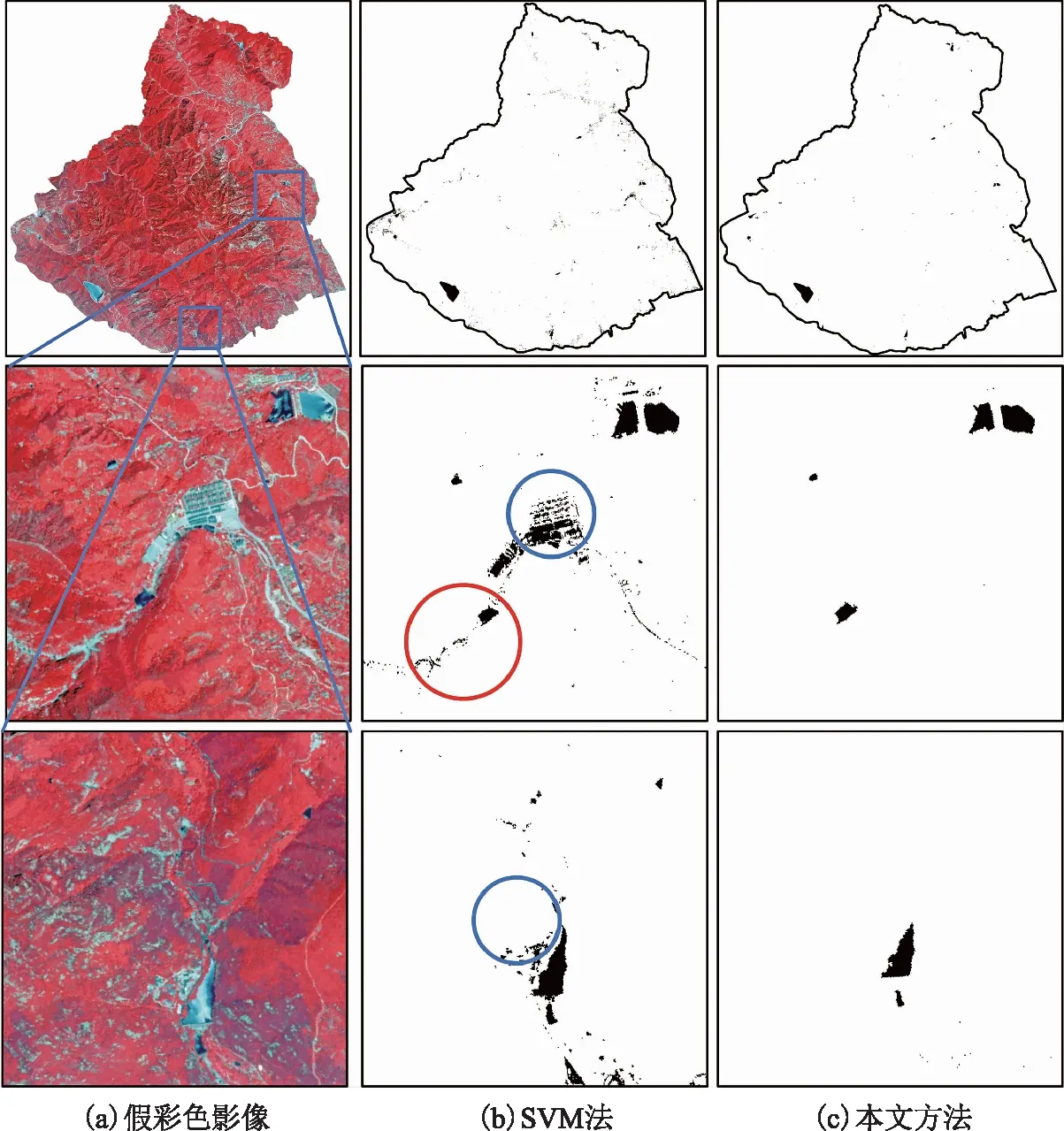
图7 验证GF-2影像水体提取结果及细节对比
SVM法提取的水体轮廓较为符合实际情况,很好地保持了水体信息,在4种水体提取方法中的漏分误差最低,但是伴有建筑物阴影以及部分山体阴影的误提,两幅影像中的总体精度较DWSM结合面向对象法下降了9.27%和7.01%。
MSWI决策树法的精度在4种方法中最低,Kappa系数分别为0.615 6和0.616 1。与NDWI相似。MSWI决策树法精度低主要在于光谱特征相似的山体阴影、植被阴影被误分为水体。SWI决策树法较MSWI决策树法精度略有提高,总体分类精度分别提高了9.30%和6.61%,但依然存在着大量阴影错分,同时漏分误差也较高。无论是SWI决策树法还是MSWI决策树法,应用于本研究区的水体提取效果均不理想,不能作为水体提取的最终结果。
4 结束语
基于GF-2影像,本文利用DWSM与面向对象法相结合的方法,在山区实现了水体信息的高精度提取,并与SWI决策树法、MSWI决策树法和SVM分类法进行对比,结论如下。
1)在GF-2影像中,DWSM能够很好地减少由地形起伏造成的阴影噪声,相较于NDWI,应用于山区水体提取效果较好。
2)DWSM结合面向对象法的提取精度高于对照方法,在两个时相GF-2影像上都可以取得较高的精度;其次是SVM分类法,SVM法可以较为精确地提取水体轮廓,但会受到建筑物阴影的影响,降低了水体提取精度;而SWI决策树法精度比前两种方法低,存在大量阴影噪声。
3)在波段较少的影像中,单纯利用水体指数法提取山区水体的精度不高,如果要获得更好的水体提取效果,水体指数与面向对象法相结合是一种有效的方法。
本文所提出的水体提取方法在山区取得了较高的精度,后续将进一步验证其在平原地区的应用。获取合适阈值是光谱模型准确提取水体的前提,如何快速准确地在影像中确定水体阈值将是下一步的方向。
