基于深度学习的Sentinel-1A影像冰川识别
2022-10-13王梓霏柯长青
王梓霏,柯长青
(南京大学 地理与海洋科学学院,南京 210023)
0 引言
在全球变暖的背景下,冰川呈现物质加速亏损趋势,对全球海平面上升、冰冻圈灾害等方面产生深远影响[1]。研究表明,高亚洲地区山地冰川近期大多处于加速消融状态[2-3],导致冰川泥石流等灾害频发[4],对居民生命安全产生巨大威胁。因此,冰川变化监测研究对区域可持续发展具有重要意义。
基于光学遥感影像提取冰川边界具有一定的局限性,主要是表碛部分的岩屑混合物和周围裸露岩石表现出相似的光谱信息[5]。合成孔径雷达(synthetic aperture radar,SAR)不受天气影响,主要根据雷达的干涉和极化特征对冰川进行识别[6-8]。Callegari等[9]通过对Radarsat-2和Sentinel-1影像进行极化分解,基于支持向量机提取冰川边界。
2012年提出的AlexNet[10]使得卷积神经网络(convolutional neural networks,CNN)快速发展,此后VGG[11]、GoogLeNet[12]、ResNet[13]等大大提高了图像的分类精度。2014年提出的全卷积网络(fully convolutional network,FCN),通过替代卷积神经网络的全连接层实现影像的像素级分类[14],后续又发展出如UNet[15]、SegNet[16]、DeepLab系列[17]以及轻量型网络MobileNet[18]等。卷积神经网络凭借其优良的纹理特征提取能力在冰川识别方面也展现出优势。Baumhoer等[19]利用Sentinel-1影像的后向散射系数,结合TanDEM-X DEM对UNet网络进行微调有效提取了南极冰川和冰架前缘;Zhang等[20]结合不同时间、不同传感器的光学影像和微波影像,评估了UNet和分别以ResNet、DRN、MobileNet为主干网络(backbone)的DeepLabV3+共4种网络识别格陵兰岛冰崩前缘的效果;Xie等[21]结合Landsat影像、DEM及其反演的地表参数基于SegNet构建冰川识别网络GlacierNet,可以较好地识别表碛覆盖型冰川。
上述研究侧重于提取南极冰架前缘或冰崩前缘,较少关注于提取大范围的山地冰川。大尺度的山地冰川其空间异质性较大,光学遥感易受天气条件的制约,因此基于遥感影像快速、半自动化地提取冰川边界仍是一个具有挑战性的科学问题。深度学习能够通过卷积神经网络对输入的特征影像自动提取不同深度的特征,实现对冰川的自动、快速、高精度的识别,故本文结合Sentinel-1A与地形数据,通过基于不同backbone的UNet和DeepLabV3+卷积神经网络对喀喇昆仑地区的冰川进行识别,分析并评估VGG16-UNet、VGG16-DeepLabV3+、MobileNetV2-UNet以及MobileNetV2-DeepLabV3+ 4种网络的优劣性,并比较神经网络提取的冰川边界与GLIMS(global land ice measurements from space)边界在纯净冰川、表碛冰川、冰川湖以及前进冰川的提取效果;同时在保持地形因素不变的情况下,对比分析VH和VV极化通道下模型的识别精度;在VH极化通道下对比分析输入不同地形特征的冰川识别精度。
1 研究区与数据
1.1 研究区
喀喇昆仑位于青藏高原西北部,由一系列西北—东南向山脉构成,海拔7 000 m以上的高峰众多。该区域在冬、春季受西风环流的影响降水丰富,夏季降水则由印度洋西南季风补给,加之高海拔低气温,为冰川发育提供良好的自然基础[22]。该区域雪线海拔5 000 m左右,整个山系冰川面积达到5 800 km2,是世界上山地冰川最发达的地区之一[23]。在过去的20年中,全球冰川普遍处于退缩状态,然而喀喇昆仑地区冰川出现前进的现象,即喀喇昆仑异常。异常的变化特征使得对该区域的冰川监测有重要的意义,可为区域气候变化相关研究提供科学支撑。喀喇昆仑冰川分布以喀喇昆仑山主山脊为分界线,南侧多发育规模较大的纵向冰川,如锡亚琴(Siachen)、巴尔托洛(Baltoro)冰川等,北侧主要是规模较小的横向冰川。
1.2 数据
1)Sentinel-1A数据。Sentinel-1A是欧空局于2014年发射的C波段合成孔径雷达卫星,重访周期12 d,有VV、VH两种极化方式。采用5景升轨Sentinel-1A的IW(interferometric wide swath)模式GRD数据,包含VV和VH两种极化方式,分辨率为10 m。由于冬季影像中冰川和周围地表均被积雪覆盖,雷达后向散射系数不能较好地区分积雪覆盖的冰川与岩石,而夏季积雪较少,冰川与周围地物易于区分,故选择8月份的影像数据,详细信息如表1所示。

表1 Sentinel-1A 影像参数
2)DEM数据。ASTER GDEM(advanced spaceborne thermal emission and reflection radiometer global digital elevation model)上搭载先进星载热发射和反射辐射计,通过垂直向下和后视成像的近红外波段传感器获取立体像对并处理生成DEM。选择具有高空间分辨率精度和高程精度的V3版本数据,空间分辨率为30 m,标称高程精度为10~16 m,结合其生成的坡度作为训练数据的一部分。数据源于美国宇航局的Earthdata网站https://search.earthdata.nasa.gov/。
3)辅助数据。全球陆地冰川监测计划GLIMS利用光学遥感影像(Landsat、ASTER)结合地形数据并进行手工数字化修正来识别、监测全球冰川,提供全球冰川的分布、面积、数量等信息,较大冰川的面积相对误差小于5%,边界数字化的不确定性在3~4个像元(45~60 m)[24],且会进行不定期的数据库更新,选取2020年6月30日更新的冰川边界作为卷积神经网络的标签并用于后续精度验证,数据下载地址为http://www.glims.org/download/。
选择云量少于10%且位于9、10月份的Landsat 8影像,对波段进行假彩色合成作为冰川识别结果的底图,数据源于美国USGS(United States Geological Survey)网站https://glovis.usgs.gov/。
2 方法
2.1 方法流程
数据处理流程主要分三部分,即数据预处理、模型训练和模型精度评价。在雷达信息特征方面,冰川的后向散射系数受到冰川表面湿度、粗糙度的影响,在积雪区,积雪的覆盖使得冰川表面湿度增大、粗糙度减小,后向散射系数减小;在裸冰区,冰川冰的碎片产生粗糙的表面,反射、散射大量信号使得后向散射系数增大;表碛部分的表面更为粗糙,后向散射系数相比于积雪区和裸冰区较大,与周围岩石相似,但表碛在微波影像上存在较为明显的纹理特征,可通过深度学习提取进而与周围地物区分。在地形特征方面,冰川发育海拔较高,坡度与周围地形存在差异,有研究表明,局部入射角有助于提高分类精度,而坡向会混淆不同类别的特征分布进而降低分类精度[25]。基于上述原因,选取2020年8月喀喇昆仑地区Sentinel-1A的VH极化下的后向散射系数、局部入射角、GDEM和坡度4个参数作为深度学习网络的样本部分,将数据重采样至同样的10 m分辨率并进行波段组合,然后进行直方图均衡化处理以使得图像信息更丰富。选取GLIMS冰川边界进行二值分割作为网络的标签部分。
样本经过裁剪大小为512像素×512像素,共有4 515个样本,对样本和标签按照6∶2∶2划分训练集、验证集和测试集,对训练集和验证集进行数据增强处理,增强模型的泛化性。基于不同深度学习语义分割网络对训练集和验证集进行训练,得到验证集精度较高的权重优化模型,将模型应用于测试集得到冰川与非冰川的二分类结果,并进行精度评价,流程图如图1所示。
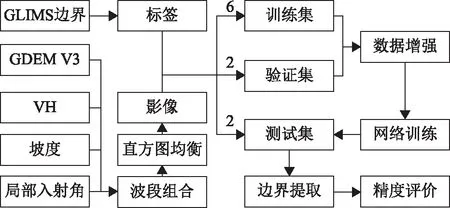
图1 基于深度学习的Sentinel-1A影像冰川识别处理流程
2.2 网络介绍
UNet是语义分割的经典网络,DeepLabV3+是语义分割的新高峰,VGG16是提取特征的传统卷积神经网络,MobileNetV2是轻量型网络的代表。两两组合的4种网络兼顾参数量少与参数量多、传统简单与复杂创新的特性,故选取这4种网络对冰川进行识别。
1)VGG16-UNet。UNet网络呈U形结构,主要包括编码器encoder和解码器decoder部分。encoder通过卷积和池化对图像降维并提取特征,decoder采用上采样且与特征部分相同尺度的图像进行拼接,将浅层特征和深层特征结合起来,更有利于提取冰川。
VGG16卷积神经网络模型由13层卷积层和3层全连接层组成,文中将VGG16作为编码部分用来提取冰川特征,故只选取前13层卷积层,卷积核大小3*3,步长stride为1,采用same方式填充,激活函数为ReLU函数,其具体结构如图2所示。
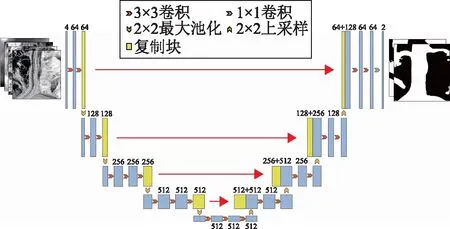
图2 VGG16-UNet网络结构
2)VGG16-DeepLabV3+。DeepLabV3+是语义分割的新高峰,主要采用ASPP(Atrous spatial pyramid pooling)模块结合编码-解码结构,简单且有效地提高了模型精度以及运算速度。VGG16-DeepLabV3+即是以VGG16作为backbone,将大小为原始图像1/4的特征图像作为低层特征输出到decoder部分,将大小为原始图像1/16的特征图像输出到ASPP模块中,再经过上采样与改变卷积通道数的低层特征进行堆叠,兼顾图像边界信息及语义信息,最后经过卷积及上采样得到冰川识别结果,具体结构如图3所示。
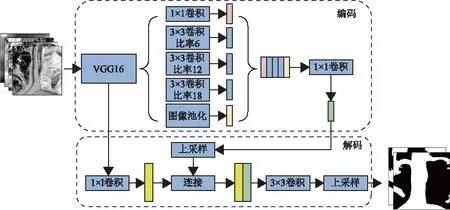
图3 VGG16-DeepLabV3+网络结构
3)MobileNetV2-DeepLabV3+。MobileNetV2网络是在保持相似精度的同时通过减少参数量来提高网络效率的轻量型网络,主要包括两个模块,分别是反残差卷积块inverted residual block和线性块linear bottlenecks。反残差卷积块是采用先升维后降维来减少信息损失,线性块是将网络小维度层输出后的ReLU激活函数改为线性函数。文中为了减少计算开销只用到MobileNetV2的前8层,其具体参数如表2所示。
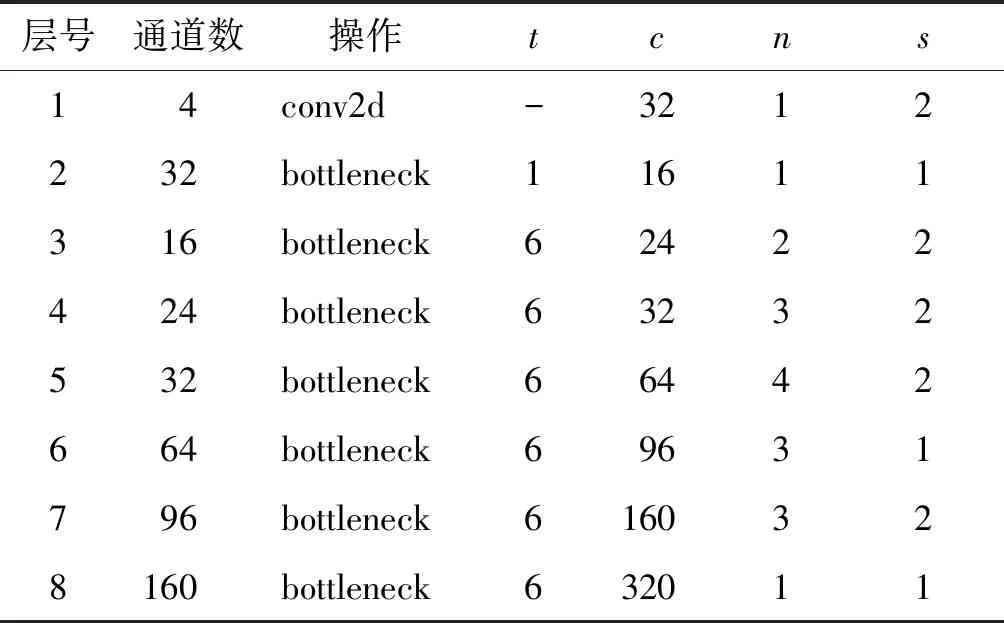
表2 MobileNetV2网络前8层参数
MobileNetV2-Deeplab V3将第3层输出的低层特征和第6层输出的高层特征相结合,改变通道数使得二者通道数一样,以相同比例影响冰川识别结果,提高了模型精度及运算速度。
4)MobileNetV2-UNet。MobileNetV2和UNet的结合有所不同,其上采样过程采用转置卷积使得图像内容更丰富。选取第2、3、4、6、8层的输出特征与decoder部分相同尺度的图像进行拼接,得到最后的冰川识别结果。
2.3 精度评价
为了评估模型的精度,采用交并比(intersection over union,IoU)、均交并比(mean intersection over union,mIoU)、总体精度(overall accuracy,OA)、准确率(precision)、召回率(recall)和F1分数(F1-score)等评价指标。交并比是预测值和真实值之间的交集与并集之比,均交并比是冰川交并比与非冰川交并比的平均值。
3 结果
3.1 网络精度对比
网络损失函数为categorical crossentropy,即交叉熵损失函数;优化器选择Adam优化算法,适用于大规模数据及参数的场景。训练开始设置的学习率为0.000 1,训练过程中损失loss不断下降直至难以下降,此时以3倍的速度减小学习率,loss进一步下降,说明网络以较小的步长可以进一步到达极小值点。通过对网络添加dropout层可有效防止过拟合,batchsize选择计算机显存可承受的最大值,batchsize合适则梯度下降方向更准确。
利用上述4种语义分割网络对训练集和测试集训练,其精度结果如表3所示。

表3 VH极化下4种网络结果精度对比
上表可以看出,以MobileNetV2为backbone的模型精度均低于VGG16,但运行速度快。基于相同的backbone,DeepLabV3+较UNet识别精度高。对于VGG16-UNet和VGG16-DeepLabV3+,前者准确率高但召回率低,冰川识别更偏向于尽可能全地识别冰川,即保证召回率的前提下提高准确率,再结合F1-score的表现进一步说明VGG16-DeepLabV3+模型精度较高。
3.2 冰川识别效果
4种语义分割模型中,VGG16-DeepLabV3+的识别精度最高,故以该模型对纯净冰川、表碛冰川、冰前湖等进行识别与分类。
1)纯净冰川与表碛冰川。锡亚琴冰川呈南北走向,冰川长约76 km,面积约963 km2,是除极地以外最大的冰川[26],其识别结果如图4所示。
纯净冰川内部较大的裸露岩石或者地表可以被很好地区分出来(图4A、B区域),但是对于面积较小的石块或者地表,深度学习则会将冰川内部全部识别为冰川(图4C区域)。
表碛冰川是表面被岩屑混合物覆盖的冰川末端,其在光学上与周围岩石光谱信息相似,在雷达影像上表现出较为明显的纹理特征。利用雷达影像VH极化下的后向散射系数作为深度学习特征之一,其能够较为准确地识别出锡亚琴冰川的表碛中段及末端(图4D、E、F区域)。
2)冰川湖。当冰川融化加快时,冰川融水以及脱落的冰块会在冰川的末端、冰面或者冰下形成冰川湖。在喀喇昆仑东南角发育有少量冰川湖,可能是受气温升高影响,冰川消融加强使湖水上涨,冰川末端所受浮力增大进而脱落形成浮冰,导致湖水面积扩大,冰川部分退缩[27]。图5为东南角部分冰川湖的分类结果。
深度学习能够较为准确地区分冰川湖和表碛(图5),主要是因为湖泊的地形特征及纹理特征是异于表碛的。而GLIMS边界是在2011年及之前数据的基础上进行不断更新与修改的编目,图5表明卷积神经网络较GLIMS边界有较好的区分表碛与冰川湖的能力。
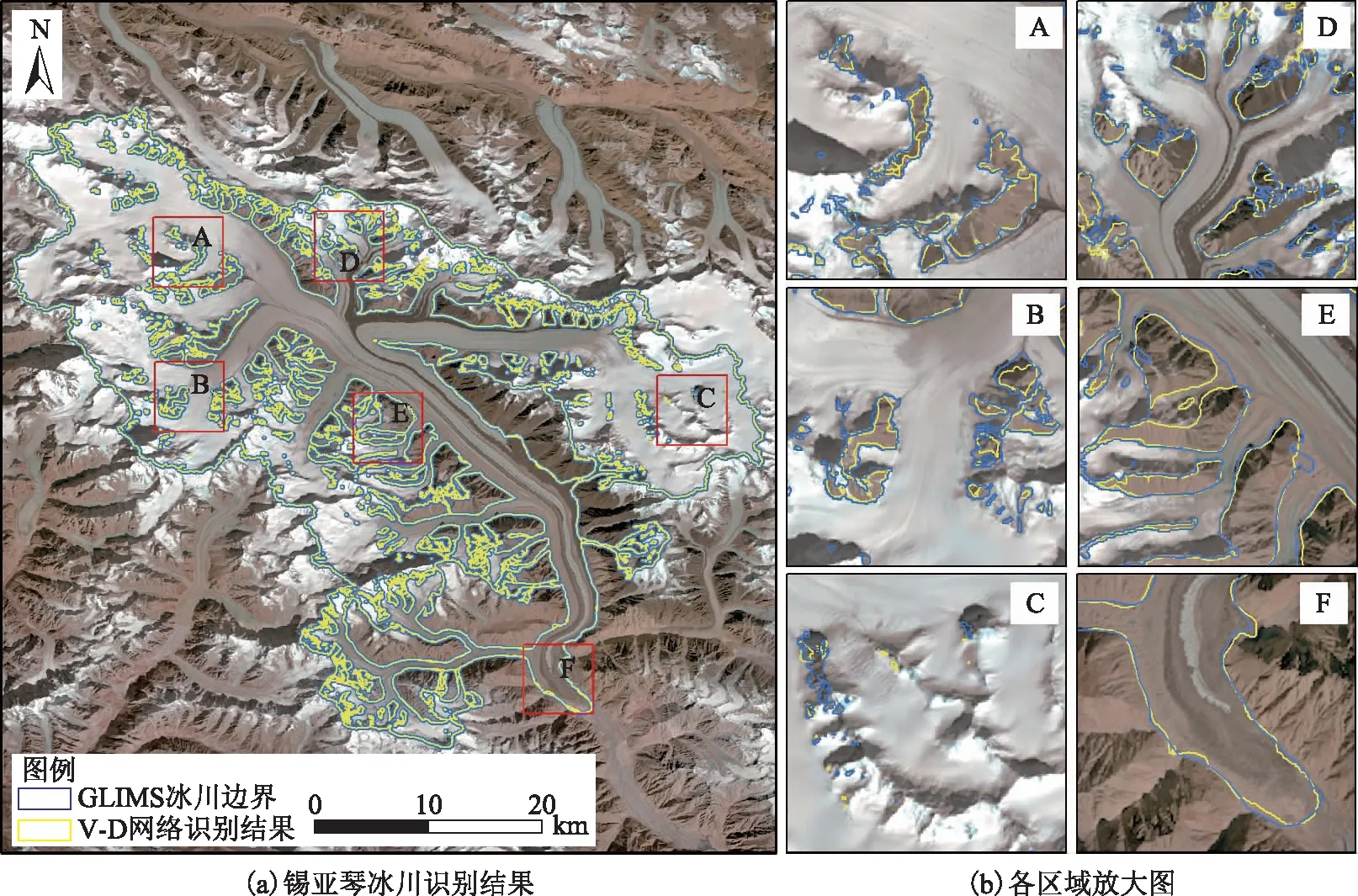
图4 基于VGG16-DeepLabV3+网络(V-D网络)的Sentinel-1A影像的锡亚琴冰川识别结果
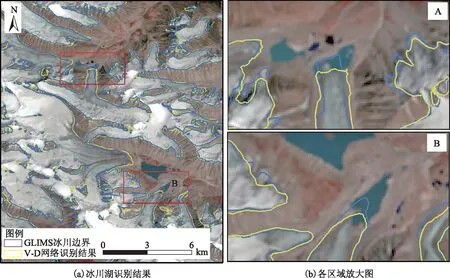
图5 基于VGG16-DeepLabV3+网络(V-D网络)的Sentinel-1A影像的冰川湖识别结果
4 讨论
4.1 网络对比
VGG16是通过不断加深的卷积层来提取特征,MobileNetV2是通过深度可分离卷积、反残差卷积块等来提取特征,其提取的特征深度不及VGG16从而导致识别精度较低,但是其训练时间少(表3)。
UNet和DeepLabV3+相比,后者识别精度较高,主要前者只是单纯地将不同深度的特征堆叠在一起,而后者采用空洞卷积,在保持分辨率的同时增大感受野,且将不同空洞率的空洞卷积叠加在一起,即将不同尺度的影像特征结合,提供更丰富更高级的语义信息,并和提供边界信息的低层特征相结合,能够更完整地提取冰川内部及冰川边界。
VGG16之后还发展了ResNet、DenseNet、Xception等参数量较大的模型,但是参数量越大代表模型越复杂,提取特征越深,不一定适合所有情况。DeepLabV3+提出时是基于Xception和ResNet为backbone,并没有展示和VGG组合的效果,文中尝试了这种组合,结果表明比VGG-UNet效果好,表现了DeepLabV3+优越的解码能力,后续可以更多关注由特征图恢复至原图像大小的解码部分。
4.2 不同极化方式对比
表碛一般比周围地物的粗糙度更高,在交叉极化(VH)通道具有比周围地物更高的后向散射系数,可以有效区分表碛与非表碛。以VV极化通道下的后向散射系数和相同的地形因素作为原始数据,对4种模型进行训练,其识别精度如表4所示。

表4 VV极化下4种网络结果精度对比
由表3和表4可知,不论VH极化还是VV极化,4种模型识别精度由低至高排序不变。除MobileNetV2-UNet模型外,VH极化下的识别精度整体高于VV极化。上述结果再次论证了交叉极化比同极化的冰川识别精度要高。
4.3 输入不同地形特征对比
模型的输入数据还包括海拔和坡度,在VH极化通道下基于VGG16-DeepLabV3+模型分别以去除海拔、去除坡度、去除海拔和坡度这3种特征组合方式对冰川进行识别,其识别精度如表5所示。结果表明:去除相关地形特征后,冰川的整体精度均有所下降,召回率明显下降,可见地形特征对于冰川识别是不可缺少的因素。其中去除海拔和坡度的冰川识别精度最低,去除坡度的识别精度略高于去除海拔的识别精度,即DEM对冰川识别精度的影响大于坡度,这主要是由于冰川发育于海拔较高的地方,表碛部分一般坡度较缓,去除海拔信息后较难区分表碛与具有相似坡度的非冰川区。

表5 VH极化VGG16-DeepLabV3+模型下输入不同地形特征的识别精度对比
4.4 前进冰川识别
喀喇昆仑地区在过去的20年中,冰川呈现稳定或者前进的状态,冰川物质平衡趋于稳定或略有增加,该异常行为甚至扩展至西昆仑、帕米尔地区。同样,相对于GLIMS边界,卷积神经网络亦能识别出部分前进冰川(图6)。
深度学习识别出的前进冰川可以分为两类:一类是两条冰川经过加速运动于末端汇聚(图6(a)、图6(b)),另一类是单条冰川的上部加速运动将物质运送至末端致使末端前进(图6(c)至图6(f))。
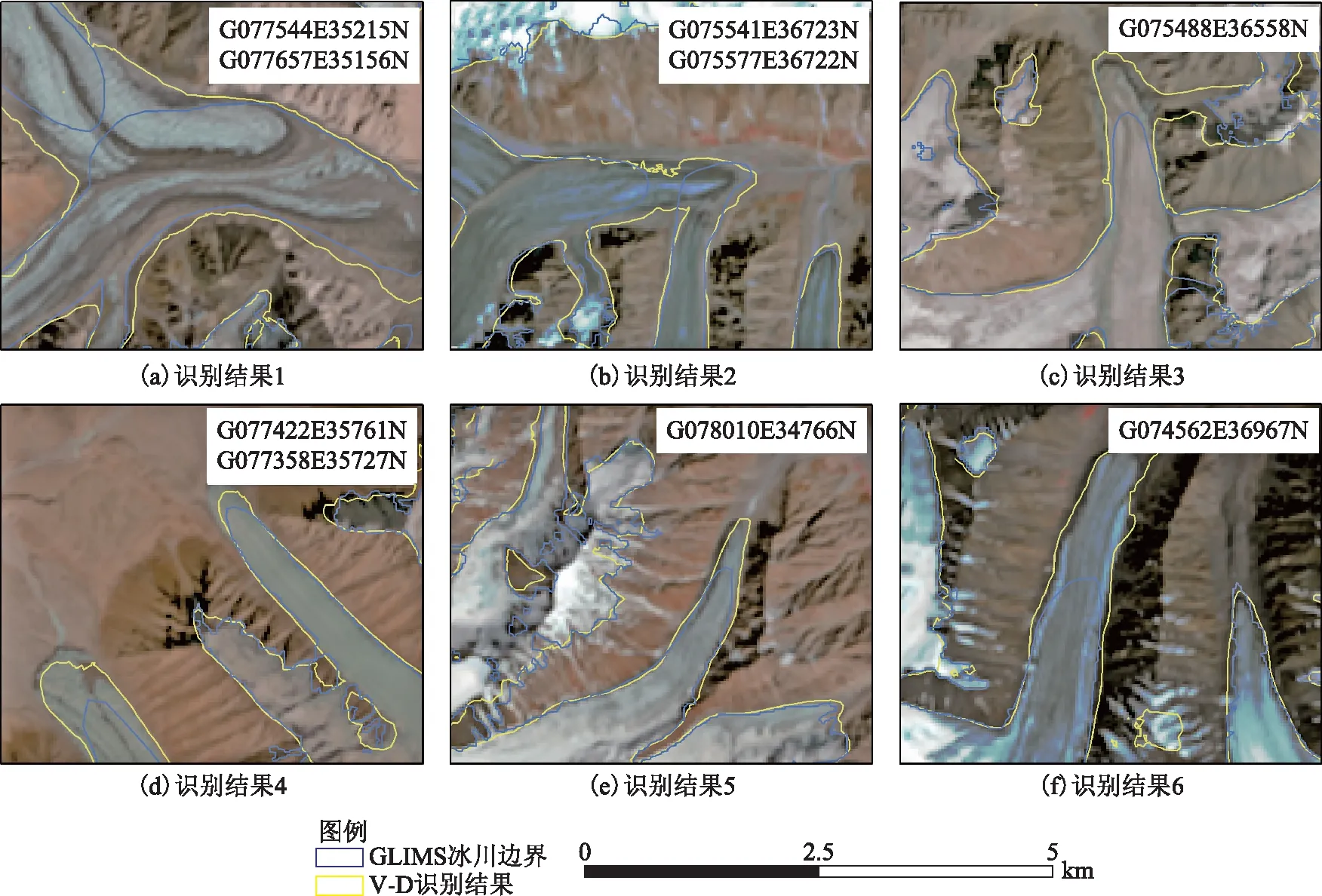
图6 基于VGG16-DeepLabV3+网络(V-D网络)的Sentinel-1A影像的前进冰川识别结果
5 结束语
基于深度学习的卷积神经网络,利用Sentinel-1A以及地形数据对冰川进行特征提取与识别,对4种模型进行训练与比较,结果表明:以MobileNetV2网络作为backbone的冰川识别精度不如VGG16高,但能够实现精度相当的同时减少运行时间,提高运行效率;UNet和DeepLabV3+相比,DeepLabV3+识别精度较高,主要是其结合了冰川不同尺度的浅层特征和深层特征来高精度提取语义信息及边界信息;VH极化较VV极化具有更好的识别精度,地形特征是冰川识别不可缺少的因素,且海拔相较于坡度对冰川识别精度影响更大。卷积神经网络对纯净冰川、表碛冰川、冰川湖及前进冰川等都有很好的识别效果,且后处理较少,雷达影像不受天气条件影响,提高冰川识别效率的同时减少人力物力的消耗,达到快速且半自动的提取大范围冰川的目的。
冰川发育于地形复杂的高山区域,由SAR斜距成像导致的几何变形现象较为严重[28],后续可结合Sentinel-1A的升降轨数据来减少叠掩、阴影等影响进而提高精度。模型的可迁移性不强,对于地形条件相差较大的地方,模型精度不高。未来可以从三方面提高冰川识别精度:添加全极化数据的极化分解特征、光学数据等作为训练数据,结合多源数据提高冰川识别精度;选取更广泛区域的数据进行训练,增加数据量的同时提升数据集的全面性;基于更为先进的卷积神经网络训练数据集,提取更高级的语义信息,进一步提高冰川识别精度。
